




 View fulltext
View fulltext

2025
Volume: 42 Issue 3
19 Article(s)

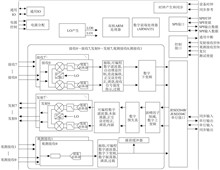
A Reconfigurable RF Microsystem with Software-defined Radio Architecture Based on Advanced Packaging
Jin YANG, Junzhi ZHANG, Min HUANG, Yuanwei YU, Hongze ZHANG, Lei HAN, and Jian ZHU
The concept of software-defined radio (SDR) has been proposed for many years.However,owing to the limitation of integrated circuit design and manufacturing technology,the development of SDR chip technology has been relatively slow for a long time.In recent years,with the rapid development of integrated circuit design and manufacturing technology,SDR chip technology has made significant progress,which effectively promotes the development of radio frequency (RF) microsystems.Firstly,the development history of SDR chip technology is reviewed,and the SDR chip based on the zero intermediate frequency (ZIF) system on chip (SoC) is introduced.Secondly,the architecture of a traditional RF microsystem is compared with that of an RF microsystem based on the ZIF SoC.Thirdly,the design of RF microsystems is analyzed from three aspects,i.e.,prototype design,packaging design,and circuit design.Fourthly,the implementation and integration process of RF microsystems are elaborated.Finally,the future development of RF microsystems is prospected.
Jun. 25, 2025Vol. 42 Issue 3 154 (2025)
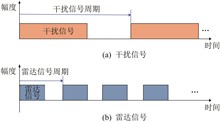
Leilei XU, Jun PAN, Yutai ZHOU, Juqi YIN, Shen ZHENG, Yulong WEI, Botao SONG, and Quan SUN
The mainlobe interference,especially the self-defense mainlobe interference,seriously affects the radar performance since the signals of the mainlobe and the radar echo generated by a real target are within the same beamwidth.Therefore,suppressing mainlobe interference is one of the hot spots and difficulties in the current radar field.To address this issue,a radar mainlobe interference suppression approach based on signal reconstruction is proposed.Firstly,the pulse signals of mainlobe interference are eliminated.Then,based on the modified iterative method with adaptive thresholding (MIMAT),the interfered pulse signals are reconstructed along the slow time dimension.The simulation results indicate that the proposed approach not only could effectively suppress the mainlobe intermittent interference,but also has high robustness to the amount and period of the interference pulses,which has a promising engineering application prospect.
Jun. 25, 2025Vol. 42 Issue 3 166 (2025)
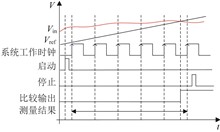
Yongliang ZHOU, Zhen MAO, and Jun TANG
In response to the design challenges engendered by the necessity to balance power consumption,volume,and cost in the system design of photoelectric sensors such as lidar and laser ranging,a time-to-digital conversion (TDC) circuit is constructed through the employment of a low-cost Xilinx Spartan 6 FPGA,and a time-domain single-slope-type analog-to-digital converter (ADC) with a sampling rate of 1.25×108/s and an 8-bit resolution is attained.The actual measurement demonstrates that this time-domain ADC exhibits good linearity after calibration:differential nonlinearity (DNL) [-0.49,0.62] LSB,integral nonlinearity Least Significant Bit (INL)[-0.98,0.74] LSB.The highest effective bit reaches 6.2 bits,and the measurement range is [0.47,2.7] V.It is ascertained that only 13% of the FPGA SLICE is occupied.This time-domain ADC exploits the high-precision clock source CDCM61004 (125 MHz,RMS Jitter<1 ps) as the system clock.The actual measurement manifests that when sampling a high-frequency signal of 50 MHz,the effective bit could reach 5.8 bits.When tested and applied in the laser ranging sensor,the time-domain ADC is capable of collecting the echo signals of the laser pulses and simultaneously obtaining the amplitude and time information of the echo signals,achieving a flexible and compact system design.
Jun. 25, 2025Vol. 42 Issue 3 175 (2025)
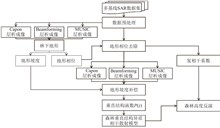
Xiaolu CHENG, Yunli CHEN, Changcheng WANG, Yanyang LIU, and Jie WAN
The forest vertical structure heterogeneity (FVSH) model constructs a forest vertical structure function using tomographic spectra obtained from tomographic synthetic aperture radar(TomoSAR),and can accurately describe the forestvertical structure.The accuracy of polarimetric interferometric synthetic aperture radar (PolInSAR) forest height inversion is closely related to the coherent scattering model.Optimizing the forest vertical structure function with tomographic spectra can improve the inversion accuracy.In this paper,the heterogeneous coherent scattering models constructed from different vertical structure tomography spectra are comparatively analyzed,and the optimized forest vertical structure function and the forest height inversion results of the coherent scattering modelare analyzed.Tests on an airborne P-band fully polarizedsynthetic aperture radar (SAR) dataset covering tropical rainforests in French Guiana are carried out.The results show that themultiple signal classification (MUSIC) algorithm outperforms the Beamforming and Capon algorithms in optimizing forest vertical structure functions and retrieving forest heights based on coherent scattering models.This study is of great significance for the forestry application of domestically produced P-band SAR satellites.
Jun. 25, 2025Vol. 42 Issue 3 1 (2025)
Yingzhi CHU, Hang XU, Xiao ZHANG, Yi LIU, Jiayi ZHENG, Tao WU, Mengjiao XU, and Xinghua XIA
In the exploration activities of target celestial bodies that may contain life,it is necessary not only to meet the requirements of planetary protection policies that have been established both domestically and internationally,but also to find the optimal balance among the engineering development progress,cost,and scientific resarch effectiveness.In this paper,the compatibility of the development process of existing deep space exploration missions and various planetary protection tasks are studied.Taking the strictest V-class restricted return mission as an example,the advancement process of five stages for the planetary protection work is sorted out,and the key measures are identified.The results show that there is a strong coupling relationship between the high-grade planetary protection work and the development of spacecrafts,which will seriously slow down the entire engineering development schedule and increase the engineering development cost.To achieve a better balance among the schedule,cost,and effectiveness and avoid the occurrence of cross biological pollution events between the target celestial bodies and the Earth,the entry point of the planetary protection work in the development of deep space exploration missions should be reasonably planned,and the key technologies for planetary protection should be improved and optimized.
Jun. 25, 2025Vol. 42 Issue 3 9 (2025)
Zhen WANG, Yimin JI, Guoqing BAI, and Nengli DONG
With the increasing frequency of human space activities,the quantity of space debris is growing rapidly,and the space debris issue is becoming increasingly prominent,which poses significant threats to the long-term safe and reliable operation of spacecraft,especially to the large manned spacecraft such as space stations.In this paper,the space debris threats faced by space stations and their potential hazards are systematically evaluated.In view of the design specifications and operational parameters of China Space Station (CSS) in orbit,the existing space debris handling capabilities are analyzed,and the vulnerabilities under the progressively worsening space debris environment are identified.Based on the analysis,several enhancement strategies for the space debris handling capabilities of CSS are proposed from four critical dimensions,i.e.,identification,protection,impact detection,and post-impact recovery.The feasibility and technical pathways of these strategies are thoroughly analyzed,and some strategic recommendations for the future implementation are put forward.
Jun. 25, 2025Vol. 42 Issue 3 26 (2025)

Fang GUO, Weifeng DU, Xunjiang ZHENG, Zhilong YE, and Xuwei ZHANG
To break through the limit of attitude measurement accuracy of traditional star sensors,the interferometric angle measurement technology can be applied to star sensors.Based on the centroid positioning technology,the fringe phase movement can be obtained from the energy of image points,and then the incidence angle can be obtained.In this paper,the imaging mechanism and characteristics of interferometric star sensors are investigated based on Moiré fringes,the influence of the optical structure parameters on the imaging effect and errors are analyzed,and finally methods for reducing the errors are given.It is shown that the grating cannot completely suppress the diffraction light beyond the ±1 diffraction order,resulting in multiple sets of image points.Therefore,the grating period and detector distance should be adjusted to move other image points off the screen.Besides,the mismatch between the Moiré fringes and the system aperture will bring segmentation errors.Thus,the deviation between the Moiré fringe period and the system aperture should not exceed 0.5%,and the phase extraction error at this moment should not exceed 2%.Moreover,when the distance between two gratings is not in accordance with the Tabor distance,there will be a phase deviation in the imaging.In view of this,the reference wavelength should be designed according to the target spectra.
Jun. 25, 2025Vol. 42 Issue 3 95 (2025)
Yanqing WANG, Jinfeng ZHONG, Jie SHEN, Xunjiang ZHENG, Wenshan ZHU, and Hua KONG
With the increasing amount of satellite images and communication payload data,higher requirements have been put forward for the storage capacity,recording and playback speed,and control time accuracy of space borne information systems.In this paper,a design method for a high-capacity spaceborne storage module is proposed.The overall system scheme of the storage module is elaborated.The expansion of storage capacity is achieved through the daughter boards and carrier boards,by which the storage capacity reaches 192 Tbit.The high-speed data exchange within the module is achieved through the internal PCIe inter face,by which the module supports up to 6 storage daughter cards.The external high-speed data transmission is achieved through the SRIO high-speed serial data and Ethernet,by which the recording and playback speed reaches 40 Gbit/s.The information is transmitted with high reliability,real-time,and efficiency through the time-triggered Ethernet.According to the requirements of the SpaceVPX architecture,the mechanical and electrical interfaces of the storage module are designed uniformly.The power and clock requirements of the entire system are analyzed,and the detailed design methods are presented.This article provides testing verification methods and results for the file management capability and record playback of storage modules,and the proposed method has significantly improved the storage capacity,recording and playback capabilities,and reliability compared with traditional satellite information systems.
Jun. 25, 2025Vol. 42 Issue 3 104 (2025)
Tao CHEN, Biao XU, Shuang LI, and Xun SONG
An intelligent search strategy based on predictive control and an exploration and exploitation sparrow search algorithm (EESSA) is proposed to address the cooperative search problem of multiple flight vehicles.First,the task area is gridded,and the target existence probability map and information certainty map are used to model the task area.Then,the idea of model predictive control (MPC) is adopted to predict the future flight paths of the vehicles for cooperative search over a certain period.The probability of target existence and the certainty of information are used to quantify the predicted flight paths,and the online decision-making problem of the multiple flight vehicles is modeled as an optimization problem.Finally,the sparrow search algorithm (SSA) is used to obtain the intelligent search decisions.To address the shortcomings of SSA in terms of global optimality and convergence speed when dealing with complex optimization problems,the Tent chaotic mapping and elite back propagation learning strategy are introduced to enhance the diversity of the initial population.The golden sine strategy is adopted to update the positions of the producer sparrows and improve the algorithm’s ability in escaping from local extrema.The positions of scroungers are updated by integrating the concept of exploration and exploitation.Additionally,the cosine strategy and greedy algorithm are utilized to optimize the number of scouter sparrows and update the offspring population,accelerating the convergence speed of the algorithm.Simulation analysis verifies that the proposed algorithm effectively improves cooperative search efficiency.
Jun. 25, 2025Vol. 42 Issue 3 117 (2025)
Tianhong LIANG, Gang LIU, Wenshan ZHU, and Xudong LI
This article focuses on the satellite attitude maneuver task with the gimbal control moment gyro (SGCMG) as the attitude control actuator.The SGCMG frame speed is used as the attitude control input,and an attitude dynamics equation considering the singular characteristics of the SGCMG is established.The SGCMG control method based on the manipulation law often generates significant torque errors,and is prone to singularity.In view of the advantage of explicitly expressing constraints in optimization methods,a predictive control method for nonlinear models based on optimization is used to constrain the singularity phenomena that need to be avoided,and a satellite attitude maneuver prediction controller is designed.Finally,a predictive controller is designed for some SGCMG failure conditions.The results show that the new nonlinear model predictive controller(NMPC)designed for satellite attitude maneuvering tasks has a strong singularity avoidance effect and avoids the disadvantage of excessive deviation between the command torque and the actual output torque in the control law.
Jun. 25, 2025Vol. 42 Issue 3 128 (2025)
Xu CHENG, Jianping JIANG, Guoqi JIANG, Qingjun LI, Zhiyuan WANG, and Zhiqin ZHUO
During the on-orbit assembly of ultra-large space structures,transporting large flexible assembly modules to the docking position may induce significant structural vibrations.In this paper,a compliance control method based on input shaping is proposed to prevent the structural vibrations by analyzing the coupled dynamics of the space robot and flexible assembly module system.A coupled dynamics model of the space robot and assembly module system is established using the natural coordinate formulation and absolute nodal coordinate formulation (ANCF).An input shaping feedforward control method is designed for the space robot handling the flexible assembly module.The numerical simulations show that the proposed modified input shaping (MIS) control method effectively suppresses the structural vibrations during the transportation,achieving fast and stable transportation.Compared with the commonly-used zero vibration and derivative (ZVD) shaper,the method proposed in this paper significantly reduces the transportation time and enhances the transportation efficiency.
Jun. 25, 2025Vol. 42 Issue 3 137 (2025)
Chaoxiang XIE, Shenhang WANG, Ruishi LIN, Chuanjie SHEN, and Tao ZHANG
Lithium-ion battery has become the most popular battery in aviation,aerospace,and equipment applications because of its high energy density,long cycle life,and no memory effect.Fast-charged lithium-ion battery refers to the lithium-ion battery with a large rate of charging capacity.Ordinary lithium-ion batteries mainly have low charging rates.At the rate of 1 C,a battery takes 1 h to 1.5 h to be fully charged.After the fast-charged lithium-ion battery technology is adopted,the charging time can be greatly shortened.For example,at the rate of 3 C,the charging time can be reduced to about 30min.In the military field,increasing the charging rate can shorten the response time of various loads,and thus improve their flexibility and real-time performance.In this paper,the mechanism of fast-charged lithium-ion battery is analyzed.A 1.0 Ah fast-charged lithium-ion battery is prepared through the power-type design process,taking the ratio-type ternary material Ni-Co-Mn(NCM) as the cathode and amorphous-coated graphite as the anode.The battery has the specific energy up to 205 Wh/kg,and can constantly be charged and discharged at a rate of 5 C.At the rate of 3 C,the capacity retention of the battery is greater than 80% after 1 000 fast-charged and discharged cycles,demonstrating good fast-charged capability and cycle stability.
Jun. 25, 2025Vol. 42 Issue 3 147 (2025)
Xiaoshi ZHANG, and Chuanjun CAO
The effects of Reynolds number on the compressor efficiency are investigated by tests on three highly-loaded 10-stage axial compressors.The tests are conducted by adjusting the inlet total pressure, and thus different Reynolds numbers are obtained.The results indicate that the compressor efficiency decreases when the Reynolds number decreases.Based on the test results, reasonable correlations between the Reynolds number and compressor efficiency for each of the three compressors are obtained.The comparison between the test result-deduced correlations and Wassell correlations indicates that the effects of Reynolds number on the efficiency predicted by the Wassell correlations are less than those obtained by the test result-deduced correlations.Owing to the complex loss models and flow behavior in highly-loaded multi-stage compressors, additional influence factors, including the tip clearance and the compressor inlet duct design, should be considered for performance correlations.Nevertheless, the Wassell correlations are valid for the tendency prediction of performance changes relating to the Reynolds number, while accurate correlations still largely depend on the specific test results.
Jun. 25, 2025Vol. 42 Issue 3 18 (2025)
Xueqi PANG, Haijun LUO, Qifeng CUI, Yunbin MA, and Fangzhou LI
With the continuous development of space technology,such as earth remote sensing of and deep space exploration,the space structure is becoming more and more large and complex,resulting in higher requirements for the lightweight,high stiffness,high precision,high stability,and high deployment ratio of space deployable mechanisms.The space spiral deployable mechanism mainly includes the spiral tube and actuator for controlled extension and retraction (STACER) and the coilable mast.The STACER has the advantages such as small volume,lightweight,and self-driven,and the coilable mast has the advantages such as high stiffness and lightweight.As a class of deployable mechanisms,the space spiral deployable mechanism is the basis for the construction of large and complex space structures,and is currently a hot topic of research and application at home and abroad.The working principle,research progress,and application of the space spiral deployable mechanism,as the research object,are investigated and elaborated,and the research and application progress of space spiral deployable mechanisms at home and abroad is summarized.
Jun. 25, 2025Vol. 42 Issue 3 32 (2025)
Linhan FU, Xiaofeng CHEN, Jinbao CHEN, Chuanzhi CHEN, and Guang ZHENG
In response to the development requirements of large-aperture,lightweight,and high-precision spaceborne deployable antennas,a support mechanism for large parabolic cylindrical spaceborne deployable antennas with a deployed aperture of 11 m×52 m is proposed and designed.Based on the characteristics of the mechanism composition,a spatial geometric model and a finite element model are established.A modal analysis is conducted on the mechanism by means of the Lanczos modal analysis theory,and the effects of the member size and material on the natural frequency are systematically evaluated.Additionally,the performance of the deployable antenna support mechanism is quantitatively evaluated by analyzing and calculating the mass-to-area ratio and f-number.The results indicate that the member size and support material are key factors affecting the dynamic characteristics of the antenna support mechanism.While ensuring the structural stiffness,the mechanism achieves lightweight design and possesses high pointing accuracy.
Jun. 25, 2025Vol. 42 Issue 3 42 (2025)
Ning XUE, Xiaofeng CHEN, Guang ZHENG, Chuanzhi CHEN, and Jinbao CHEN
Ultralarge deployable antennas are one of the important directions for the future development of space payload mechanisms.However,the existing antenna configurations are difficult to simultaneously meet the requirements of both expandability and folding ratio.Therefore,a design scheme for deployable antennas with strong expansion,ultra-high folding ratio,and multiple hoop truss modules grouped in parallel is proposed.The kinematic performance is investigated,a modal analysis is carried out,and the folding performance is verified with the help of tests.First,a two-layer topology configuration design based on inverse generation and an improved Denavit-Hartenberg (D-H) method for partitioning are proposed to complete the antenna grouping and configuration design.Then,the topology analysis of the antenna and the analysis of the degrees of freedom of the unfolding process are carried out based on the screw theory and graph theory to verify the rationality of the design.Finally,based on the theoretical derivation and simulation,along with the prototype tests,the kinematics and folding characteristics of the antenna are investigated and verified.The results show that the proposed grouping method can meet the requirements of strong expansion and ultra-high folding ratio,and the designed space deployable mechanism has good deployable performance and kinematic characteristics.The research results provide a method for the design and theoretical analysis of deployable mechanisms for ultra-large deployable antennas.
Jun. 25, 2025Vol. 42 Issue 3 61 (2025)
Liankai XU, Song WU, Yuefeng MA, and Guoan TANG
In the construction of extraterrestrial bases such as the Moon,cranes areessential engineering equipment.Because of the weak personnel support ability,the swing during the lifting operation should be suppressed as much as possible by the actuating ability of the equipment itself.Based on the basic mechanical principle that the mechanical energy of a dynamic system can be dissipated by negative work,an active suppression method is proposed to control the movement of the lifting point of the crane according to the hanging force.The stability of the closed-loop system is proven mathematically.An experimental scheme is designed to verify the swing reduction principle of the crane with a system composed of a planar two-degrees-of-freedom manipulator,a multi-axial force sensor,and a real-time simulation controller.The results show that under the active action of the lifting point,the swing can be rapidly stopped,and the attenuation time is reduced to 1.53% of the free vibration.
Jun. 25, 2025Vol. 42 Issue 3 72 (2025)
Lingyu YI, Yunfeng YU, Shanliang DU, Wei WANG, Yong YUAN, Zhongcheng MU, and Shufan WU
A method for the vertical downward separation experiment of small satellites is adopted to solve the problem of limited space for the separation of a small satellite from a large spacecraft.Based on the coordinates of high-speed photographic target obtained from the vertical downward separation experiment of a small satellite on a large spacecraft,a calculation model for the separation parameters of the small satellite under zero gravity is derived and established,and the separation velocity,separation angular velocity,and attitude angle of the small satellite are obtained.Based on the Monte Carlo method,a simulation analysis for the separation kinematics of the small satellite is carried out.The simulation results obtained are consistent with the separation experiment data,which verifying the correctness of the calculation model and the effectiveness of the experiment method.This separation experiment method can be used for similar small satellites.
Jun. 25, 2025Vol. 42 Issue 3 80 (2025)
Chengwei LI, Zirui DONG, Hongxia JI, and He MA
In response to the high-precision maintenance requirements for large-sized space deployable masts in orbit,amulti-factor assembly precision analysis method considering hinge clearance and rod length deviation is proposed.An equivalent model for rotational pair clearance based on the massless rod principle is established,and a deployable mast motion model incorporating rod length deviation is constructed based on the Denavit-Hartenberg (D-H) theory.The Monte Carlo method is used for the multi-factor error simulations,yielding the ranges of hinge clearance adjustment and rod length deviation that meet the assembly accuracy requirements.Experimental results indicate that the proposed method effectively ensures the deploy ability and assembly precision of the deployable mast.
Jun. 25, 2025Vol. 42 Issue 3 88 (2025)
© Copyright 2018-2021 | Chinese Laser Press.
All Rights Reserved 沪ICP备15018463号-20