







Please enter the answer below before you can view the full text.


2025
Volume: 20 Issue 3
35 Article(s)

Bo LI, Guoqing ZHANG, Xianku ZHANG, and Hongguang LÜ
ObjectivesTo solve the problems of communication resource limitations and parameter uncertainty in the dynamic positioning control tasks of fully driven ships in marine engineering applications, this paper presents a robust event-triggered control algorithm for ship dynamic positioning that considers the dynamic characteristics of the actuators.MethodsThe algorithm uses a radial basis function (RBF) neural network to approximate system uncertainty. At the same time, a novel event-triggering mechanism in the sensor-controller channel is designed by introducing a zero-order hold which reduces the signal transmission frequency in the sensor-controller and controller-actuator channels, thus greatly saving the communication resources of the system. In addition, the adaptive parameters are updated online and designed to compensate for the gain uncertainty of the actuators, which reduces the computational load and ensures that the ship can perform dynamic positioning tasks stably.ResultsThe Lyapunov stability theory is used to prove that all error variables in the closed-loop control system satisfy semi-global uniformly ultimately bounded (SGUUB) stability, and the effectiveness of the proposed algorithm is verified through comparison with a simulation.ConclusionsThe results of this study can provide useful references for promoting the development of intelligent ship equipment.
Jun. 30, 2025Vol. 20 Issue 3 202 (2025)
Ning WANG, and Zhiqiang LI
ObjectivesThis paper proposes a speed and power allocation strategy collaborative optimization method for hydrogen fuel cell ships based on particle swarm optimization (PSO) in order to solve the problem of the energy efficiency improvement of such ships being limited by their difficulty in reaching optimal speed under complex sailing environments.MethodsThe spatial grid clustering analysis of meteorological environment data is carried out by K-means and used as the basis for route segmentation. A speed-hydrogen consumption model of a fuel cell ship is constructed by ship navigation resistance analysis and the equivalent hydrogen consumption idea. The optimization method of inheritance-link between voyage segments is designed by taking acceleration as the optimization parameter, then PSO is used to optimize the ship's speed and fuel cell output power.ResultsThe results show that the proposed speed and power allocation strategy collaborative optimization method reduces hydrogen consumption by 3.85% and 1.99% respectively compared with the original speed and traditional speed segmentation optimization method.ConclusionsThe proposed method can effectively improve the sailing energy efficiency of short-range ships and resolve the defect of the speed ladder allocation of traditional segmental optimization, providing useful references for the popularization and application of hydrogen fuel cell ships.
Jun. 30, 2025Vol. 20 Issue 3 211 (2025)
Tongtong QIE, Jianyong ZHENG, Lei ZHANG, Zhichu LEI, and Xutao HE
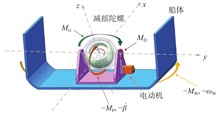
ObjectiveIn order to improve the performance of the anti-roll gyro, a passive control parameter optimization method based on a genetic algorithm is proposed. MethodsFirst, based on the ship seakeeping and gyro dynamics theories, the passive control system of the anti-roll gyro is precisely modeled, containing an electromagnetic torque model of the precession motor. Second, to address the balance between rocking reduction efficiency and system chatter, a parameter optimization method for the onboard anti-roll gyro control system based on a genetic algorithm is proposed. The performance of the system under the fourth level of typical sea conditions is then simulated and verified by Matlab/Simulink.ResultsThe simulation results show that the optimized system has superior performance, with a highest rocking reduction efficiency of 97.44% and no obvious chatter in the precession system.ConclusionThe results of this study can provide useful references for the design and optimization of onboard anti-roll gyro control systems.
Jun. 30, 2025Vol. 20 Issue 3 223 (2025)
Chenghu XU, Weibo LI, Hao ZHANG, Zhiming PENG, and Hualiang FANG
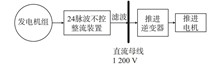
Objective Aiming at the stability problem of naval DC propulsion systems with a significant proportion of power electronic devices, a stability analysis and controller parameter optimization method based on the Middlebrook impedance ratio stability criterion is proposed.MethodFirst, the small-signal output impedance of the DC bus and small-signal input impedance of the inverter and motor are deduced and established through the simplification of the system model, linearization of the nonlinear system, dq transformation of the three-phase AC system, etc. The controller parameters are then optimized using a particle swarm algorithm to minimize the value of support capacitance on the condition of ensuring system stability. Finally, a simulation model of the DC propulsion system is constructed to simulate and analyze the influence of the support capacitance and equivalent resistance and inductance of the DC bus on the stability of the system.ResultsThe simulation results show that the system's stability margin is obviously improved after the controller parameters are optimized by the particle swarm algorithm, which in turn lowers the value of support capacitance and reduces the overall size of the DC propulsion system's converter.ConclusionThe findings of this study can provide useful references for research on voltage oscillations and their suppression in integr-ated power systems with a significant proportion of power electronic devices.
Jun. 30, 2025Vol. 20 Issue 3 232 (2025)
Qihuan WU, Zhiyu ZHU, Weihan HAO, Denghao YANG, and Cheng XU
ObjectivesIn order to ensure the safe and stable operation of a shipboard power system under fault conditions, a dynamic reconfiguration optimization method is proposed that considers time-varying load characteristics.MethodsFirst, considering the topological structure, generation capacity limit, line current, node voltage and other constraints of the shipboard power system, a dynamic reconfiguration optimization strategy is proposed to minimize weight load cutting and voltage deviation. Next, an improved inertial particle swarm optimization algorithm is used to solve the optimization model. Finally, a typical shipboard power system is used as an example to verify the effectiveness of the proposed method.ResultsThe simulation results show that compared with the static reconfiguration method, the dynamic reconfiguration method can reduce the system's voltage deviation by 9.94%, thus significantly improving the quality of the network power supply.ConclusionsThe results of this study can provide references for the reliability design of shipboard power systems.
Jun. 30, 2025Vol. 20 Issue 3 241 (2025)
Hui YI, and Hui CHEN
ObjectiveIn order to improve the power quality of ships under complex working conditions, an energy management strategy based on wavelet decomposition is proposed for fuel cell ships with a hybrid energy storage system (HESS) consisting of a battery and supercapacitor. Methods First, wavelet decomposition and fuzzy logic control are used to distribute the load power of the ship and optimize the charging and discharging process of the battery. Next, grey wolf optimizer (GWO) is used to optimize the parameters of the HESS and ensure that the energy management strategy matches the equipment parameters. Finally, the ship power system model is built using the Matlab/Simulink platform, and the simulation experiment is verified.ResultsThe simulation results show that the proposed energy management strategy can effectively suppress the output power fluctuation of the fuel cell and realize rational power distribution among devices, reducing the optimized bus voltage fluctuation by 23.19%. ConclusionThis study can provide useful references for the optimization design of the power quality of ships.
Jun. 30, 2025Vol. 20 Issue 3 249 (2025)
Lintao LI, chao ZHANG, Zhirong YANG, Zhushi RAO, and Wangqiang XIAO
ObjectivesIn order to isolate low-frequency torsional vibration for ship shafting, this paper proposes and analyzes a high-static-low-dynamic stiffness torsional vibration isolator.MethodsFirst, the components are designed on the basis of the parallel connection of positive and negative torsional stiffness, and the isolator model is built using SolidWorks software and manufactured through 3D printing. The Duffing equation of the model is then solved by the harmonic balance method in order to study the influence of the structural parameters and excitation amplitude on the torque transmissibility of the isolator. Finally, finite element simulation is conducted on the model using Ansys Workbench software, and the printed prototype undergoes static load torsion test analysis. ResultsThe static test results show that the vibration isolator has high-static-low-dynamic stiffness characteristics within the range of -2° to 2°, and can bear torque of 150 N·mm. Torque transmissibility analysis verifies that the vibration isolator has better low-frequency performance with appropriate structural parameters than that of a linear isolator. ConclusionsThe proposed torsional vibration isolator achieves high-static-low-dynamic characteristics through the parallel connection of positive and negative stiffness, providing valuable references for low-frequency torsional control for ship shafting.
Jun. 30, 2025Vol. 20 Issue 3 258 (2025)
Chao BIAN, Linsheng XIA, Pu ZHAO, Jiaqi DING, Xiaofang WANG, and Haitao LIU
ObjectivesThis paper investigates the variation in the uniformity of the wake field on the propeller disk of an underwater vehicle according to the tail fin axial position and angle of run of the stern, and reveals the influence mechanism of the stern structure on the wake field. MethodsNumerical simulation analysis of the underwater vehicle is carried out using the computational fluid dynamics (CFD) method, and Gaussian process modeling analysis is performed for the wake field inhomogeneity index to explore the response relationship between structure-field performance within the design range, analyze the sensitivity of the stern structure to wake field inhomogeneity, and search for a Suboff stern structure with excellent wake field homogeneity. ResultsAs the results show, with a fixed tail fin axial upwind area to ensure the operation performance and sailing efficiency of the underwater vehicle, the tail fin axial position and angle of run of the stern have a large impact on the propeller disk inhomogeneity; when the angle of run of the stern is $ \theta ={10}^{\circ} $, the backward movement of the tail fin axial reduces the propeller disk inhomogeneity, and the wake objective function (WOF) decreases from 0.124 5 to 0.091 4; when the angle of run of the stern is $ \theta ={20}^{\circ} $, the backward movement of the tail fin axial causes the inhomogeneity of the propeller disk to first increase and then decrease, and the WOF increases from 0.1049 to 0.1145, then decreases to 0.1068; when the tail fin axial position is $ h= $3.810 0 m, the increase of the angle of run of the stern makes the propeller disk inhomogeneity decrease, and the WOF decreases from 0.124 5 to 0.104 9; and when the tail fin axial position is $ h= $4.114 8 m, the increase of the angle of run of the stern makes the propeller disk inhomogeneity increase, and the WOF increases from 0.091 4 to 0.106 8. This shows that the adjustment of the Suboff stern structure using Gaussian process modeling analysis can effectively reduce the inhomogeneity of the wake field on the propeller disk. ConclusionsFor a Suboff model with a fixed stern upwind area, a configuration with a large tail fin axial position and small angle of run of the stern can significantly enhance the propeller disk wake field uniformity. The findings of this study can provide useful references for the design of the stern structures of underwater vehicles.
Jun. 30, 2025Vol. 20 Issue 3 14 (2025)
Liuming YANG, Shicheng LIU, Zhiyong PEI, and Xiangshao KONG
ObjectiveThis study aims to advance the development of composite drag reduction technology involving super-hydrophobic surfaces and bubbles by investigating the coalescence characteristics of bubbles on wetting surfaces and revealing the effects of surface wettability, bubble spacing, and bubble size on bubble coalescence.MethodsA numerical model of bubble coalescence on an underwater wetting surface is established based on the volume of fluid (VOF) method. The coalescence and spreading characteristics of bubbles on different wetting surfaces are analyzed by varying the surface contact angle, bubble spacing, and bubble size. The accuracy of the simulation results is validated by comparing them with experimental data.ResultsThe results show that increasing the contact angle of the wetting surface and decreasing bubble spacing facilitate bubble coalescence, while increasing bubble size slows down the spreading speed of bubbles on the surface and is not conducive to accelerating bubble coalescence. Specifically, when the contact angle increases from 130° to 170°, the initial coalescence time of bubbles decreases from 5.6 ms to 3.2 ms (a reduction of 42.9%), and the maximum spreading distance of bubbles increases from 6.53 mm to 9.4 mm (an increase of 138%). ConclusionsThe findings provide a theoretical basis for the coupling design of super-hydrophobic surfaces and bubble drag reduction technology. Optimizing surface wettability and bubble spacing can significantly enhance bubble coalescence, thereby improving the stability and efficiency of bubble drag reduction.
Jun. 30, 2025Vol. 20 Issue 3 26 (2025)
Mingjing WANG, Xiaoer HE, Chen JIANG, Haobo QIU, and Liang GAO
ObjectiveTo prevent accidents such as collisions, fires, and explosions during ship operations, a functional resonance analysis method (FRAM) that integrates subjective and objective factors is proposed and employed to analyze the safety of ship missions and identify potential resonant links. MethodsFirst, hierarchical task analysis (HTA) is employed to determine the main functions of the task. Next, the output variability of each function is calculated using the interval-valued hesitant fuzzy weighted average (IVHFWA) operator and Euclidean distance. The FP-growth algorithm is then employed to mine the association rules of upstream and downstream functions in accident cases, and the variability of function coupling is calculated based on the lift. Finally, based on the coupling variability scores, key functions and links that are prone to functional resonance in the system are identified, and corresponding barrier measures are established for focused monitoring. ResultsTaking the safety analysis of a submarine far-sea training mission as an example, the results indicate the existence of two critical links that generate functional resonance and may lead to accidents. ConclusionThe results of this study can provide vital decision-making support to ensure the safety of ship's missions.
Jun. 30, 2025Vol. 20 Issue 3 37 (2025)
Peiqing YANG, and Yaohua ZHOU
ObjectiveThe purpose of this study is to investigatethe safety risk of dynamic stability in waves of coastal sea-going ships in domestic waters by evaluating parametric roll, pure loss of stability and synchronous roll, based on the second generation intact stability assessment method for domestic ships. MethodThe Froude-Krylov assumption and free trim method are used to calculate the righting levers and stability characteristics in waves, simplified nonlinear motion equations and frequency-domain motion equation based on hydrodynamics are used to obtain the time/ frequency domain results of roll amplitude and acceleration of parametric and synchronous roll, and the stability characteristics are used to evaluate pure loss of stability. Finally the risk probabilities of three failure modes are obtained based on the probability of sea-states. ResultsThe study shows that the typical ship types may be vulnerable to pure loss of stability and synchronous roll, and assessment results of dynamic stability safety level in waves are generally consistent with the accident and investigation results. ConclusionThere is a risk of dynamic stability accidents in waves for typical Chinese coastal sea-going ship types. It is suggested that in the optimization of ship design, ship operation and sailing under adverse sea conditions, maritime supervision and accident investigation, special attention should be paid to the above safety level and accident risk assessment results.
Jun. 30, 2025Vol. 20 Issue 3 45 (2025)
Yuehu TENG, Chaofan LI, Min XU, and Renchuan ZHU
ObjectiveThe application of various free-flooding ships is increasing year by year, and the characteristic of these ships is the presence of both water tank sloshing and connectivity between internal and external seawater. In order to study this specific phenomenon, a numerical simulation is conducted. MethodUsing a CFD commercial software platform, a 3D model of a free-flooding ship section with openings on the port and starboard sides is established. The forced rolling motions under different roll periods and amplitudes are simulated in a viscous numerical water tank. Then, the relationship between the mass flow rate at the openings and the applied working conditions is studied. ResultsThe results show that if the roll period is bigger, the flow amplitude ratio will also be bigger and the time difference between the mass flow and the ship's rolling velocity will be smaller. ConclusionThe adopted method can accurately simulate the water exchange, and this water exchange will exhibit strong regularity. Based on this, further studies can be conducted on the hydrodynamic performance of free-flooding ships.
Jun. 30, 2025Vol. 20 Issue 3 53 (2025)
Yang YU, Guangzhao YANG, and Guoxiang HOU
ObjectivesThis study focuses on the influence and drag force of tandem square cylinders of variable size (with a side length ratio of 1.5) in order to determine the flow past tandem square cylinders in a constrained boundary under different gap ratios at a Reynolds number of 100.MethodsBased on the lattice Boltzmann method with the bounce-back boundary condition, comparisons of the effects of tandem cylinders of equal and variable size are made under different gap ratios. ResultsThe results indicate that cylinders of variable size can accelerate the change of the flow field pattern to a certain extent. However, they can also delay the change of the flow pattern at a gap ratio of 6. In addition, they can achieve a resistance reduction of 9.16% at most compared with the flow past a single square cylinder. However, tandem cylinders of equal size can achieve 7.76% at most. On the other hand, compared with tandem cylinders of equal size, those of variable size can achieve a resistance reduction of 67.79%. Thus, tandem cylinders of variable size can obtain a better reduction in drag force, making them a feasible way to achieve flow control and drag reduction. ConclusionsThe results of this study can provide basic guidance for the optimization of drag and flow control for flow past square cylinders in a constrained boundary.
Jun. 30, 2025Vol. 20 Issue 3 63 (2025)
Fujian LI, Xueqin LIU, Dan LI, Wei MENG, and Zhuang KANG
ObjectivesDuring side-by-side operations of two floating bodies, significant wave oscillations within the gap and large-amplitude motion responses of the floating bodies can easily occur because of their proximity under hydrodynamic interactions, which pose serious threats to operational safety. Therefore, this study investigates the hydrodynamic interference characteristics between two floating bodies of different dimensions. MethodsA hybrid two-way coupled field-domain decomposition method was employed to establish a numerical wave tank, combined with the overset technology to simulate the motion characteristics of the two floating bodies. The study focused on the hydrodynamic interference between two floating bodies of different dimensions in regular waves. First, the hydrodynamic resonance phenomenon in the gap between two floating bodies of similar dimensions was numerically simulated and compared with experimental data to validate the accuracy of the numerical model. Subsequently, the heave motions of two floating bodies with different dimensions in regular waves were simulated, and the effects of different floating body arrangements on the vertical motion responses of the floating bodies were analyzed. ResultsThe results indicate that, the hybrid two-way coupled field-domain decomposition method, validated against experimental data, offers higher computational efficiency compared to the CFD method while maintaining accuracy. At high wave frequencies, the two floating bodies tend to exhibit anti-phase motion. Additionally, when the larger floating body is positioned upstream, it provides a significant shadowing for the smaller floating body downstream. ConclusionsThis study employs the hybrid two-way coupled field-domain decomposition method to validate the hydrodynamic interference model between two floating bodies. It reveals the occurrence of anti-phase motion of the two floating bodies at high wave frequencies and the shadowing effect when the larger floating body is upstream, providing theoretical guidance for optimizing floating body arrangements and enhancing operational safety.
Jun. 30, 2025Vol. 20 Issue 3 72 (2025)
Jiadong WEN, Jiangyan SHAO, Qipeng CHENG, Weiqin LIU, and Xuming WANG
ObjectivesTo study the maneuverability of amphibious rescue boats in restricted waters, a method for predicting maneuvering motion is proposed and the maneuvering performance of rescue boats in nearshore and shallow waters is investigated.MethodsA CFD-based maneuverability analysis method is adopted to solve the hydrodynamic characteristics of amphibious rescue boats and analyze their maneuvering performance in restricted waters through maneuvering motion equations. For the analysis of the maneuverability of amphibious rescue boats in restricted waters, a fourth-order Runge-Kutta maneuvering motion equation solver is independently developed, then verified and applied to analyze the turning performance and correction capabilities of rescue boats in nearshore and shallow waters. ResultsThe results show that when the nearshore distance decreases to 1.2 times the beam of the boat, the tactical diameter decreases by 5.86%, the turning performance is improved, and the maneuverability is halved; when the water depth to draft ratio decreases to 1.2, the tactical diameter of the boat increases by 1.5 times, and the turning performance is significantly decreased, and the bow turning lag time disappears. ConclusionsThe results of this study indicate that the proposed method can be used to predict the maneuvering motion of rescue boats in restricted waters and is suitable for the optimization of the maneuverability design of rescue boats.
Jun. 30, 2025Vol. 20 Issue 3 80 (2025)
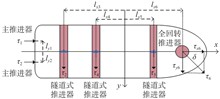
Sub-parent AUV with multi-load release capacity: principle, mechanism design and performance testing
Haochen LI, Wenchao QIAO, Hang ZHANG, Shengzeng ZHOU, Xinliang TIAN, and Binrong WEN
Objective This paper proposes the concept of a sub-parent AUV to address the specific requirements of load capacity, response speed and multi-body coordination in scenarios such as underwater search and rescue, wartime defense and dense attacks. Methods A high payload-to-weight ratio internal payload carrying system is designed for a sub-parent AUV. Additionally, a novel ejection method and multi-load deployment approach based on multi-point combination propulsion are proposed. Furthermore, a cage-style suspension system suitable for payload deployment and a multi-load sequencing mechanism are designed. The performance of the proposed design is evaluated through a series of tests conducted in both indoor laboratory and open lake environments. Results The results demonstrate that the sub AUV (payload) successfully exits the compartment within 0.2 seconds and separates from the parent AUV after 0.5 seconds of attitude adjustment. Six sub AUVs safely separate from the parent AUV within 30 seconds, with minimal impact on the parent AUV caused by payload deployment. Conclusion The feasibility and reliability of the novel AUV concept are demonstrated, showcasing its capability to achieve safe and reliable multi-load deployment.
Jun. 30, 2025Vol. 20 Issue 3 92 (2025)
Xi RAO, Xianchao MENG, Yadong FAN, Dongdong WANG, Xiaowei SU, Weihan ZHAO, Li CAI, Jinxin CAO, Jianguo WANG, and Mi ZHOU
ObjectivesTo enhance the effectiveness of button-type metal diverter strips in ship-radome lightning protection, their ionization characteristics should be investigated under conditions simulating the vicinity of approaching lightning leaders. Methods We present the experimental results of DC breakdown voltage for button-type diverter strips with various button spacings, button shapes, and diverter strip lengths, for comparing their ionization capabilities. Accordingly, we performed electrostatic field distribution calculations for the corresponding strips. Results Our experimental results show that, with increasing diverter strip length, the breakdown voltage of diverter strip exhibits saturation. For a fixed diverter strip length, a larger spacing between metal buttons results in higher breakdown voltage. Moreover, the breakdown voltage of elliptical-button diverter strip is the lowest, roughly 77% of that of circular-button diverter strips. Furthermore, the breakdown voltage of rectangular-button diverter strips is about 86% of that of circular-button diverter strips. Our electrostatic field calculations suggest that the electric field intensity distribution of button-type diverter strip is relatively high at both ends and low in the middle, and that the smaller the spacing between buttons, the higher electric field strength at the gap near both ends. Compared with the circular-button and rectangular-button diverter strips, the electric field strength at both ends of the elliptical-button diverter strip is the highest. The electric field strength between the two ends of the diverter strip gap decreases nonlinearly with the increasing diverter strip length, thus explaining the variation in breakdown voltage observed in the experiments due to differences in button shapes and specifications. Conclusions Results provide a basis for the optimization of button-type metal shunt strips, thereby enhancing the lightning protection performance of radomes.
Jun. 30, 2025Vol. 20 Issue 3 100 (2025)
Puyu JIANG, Jun LIU, Qiangjun LUO, and Yuansheng CHENG
ObjectivesThis paper proposes a domain knowledge-driven large-scale optimization algorithm for ship cabin structures based on a decomposition optimization framework. MethodsThe proposed algorithm combines domain mechanical knowledge with a general black box optimization algorithm, groups the design variables into location variables and size variables, and decomposes the original problem into a series of low-dimensional subproblems. Due to the monotonicity and locality of each bending stress, shear stress, and deformation constraint, subproblems with larger constraint margins are prioritized for optimization. All of the location variables are grouped into one subproblem, and the corresponding subproblem's objective function is to maximize the minimum constraint margin. Each girder size variable is separately grouped, and the corresponding subproblem's objective function is the weight of the cabin structure. Additionally, a surrogate model is introduced to quickly predict the constraints of each subproblem, and the sample infill criterion is adopted only in the constraint surrogate model. ResultsThe experimental results show that the algorithm can reduce the overall weight of the cabin structure by 43.5% compared to the upper bound. ConclusionsThe proposed algorithm has higher optimization efficiency and can obtain a better optimization solution compared to both the differential evolution algorithm directly using the using finite element method and the general black box optimization algorithm.
Jun. 30, 2025Vol. 20 Issue 3 108 (2025)
Low-noise optimization design for underwater series-connected multi-sphere composite shell structure
Hefan LI, Guanjun ZHANG, and Yuzhao KE
ObjectiveTo maximizing the working performance of the series-connected multi-sphere composite shell structure, an optimization design study has been conducted to enhance its acoustic and vibration performance. MethodsFirst, a finite element model was developed to calculate and analyze the underwater acoustic radiation characteristics. Then, using the model's mass as the constraint condition and the radiation noise under vertical excitation as the optimization objective, a uniform experimental design was developed using the geometric parameters of the connecting structure as the design variables. The radial basis function (RBF) neural network was used to establish a multidimensional mapping model between the design variables and the optimization objective. The particle swarm optimization (PSO) algorithm was employed to optimize the underwater radiation noise of the model, and the results were verified through the finite element method. Finally, underwater acoustic radiation experiments were carried out, and the experimental test values were compared with the simulation values to validate the accuracy of the simulation results.ResultsThe results show that after optimization, the total underwater radiation sound power level of the series-connected multi-sphere composite shell under vertical excitation was reduced by 2.92 dB, while the mass was decreased by 0.061 t.ConclusionThe research provides new insights into the optimization of low-noise structural design methods.
Jun. 30, 2025Vol. 20 Issue 3 118 (2025)
Bohan WANG, and Deqing YANG
Objective Based on the acoustic black hole and anti-resonance theories, this paper presents an elastic anti-resonant energy harvester which is suitable for multi-frequency domain vibration reduction. MethodsBy adjusting the structural parameters of the energy harvester, low and medium frequency vibrations on the transmission path and the source of the power equipment can be reduced accurately, addressing the disadvantage of the traditional acoustic black hole structure with poor low-frequency range vibration reduction effects. The Rayleigh method is used to derive the fundamental frequency calculation formula of the energy harvester. The designed multilayer energy harvester is then applied to a standard ship engine room panel and its vibration reduction effect is verified. In accordance with the research results, the vibration reduction rules and effect are analyzed, and corresponding improvements are made. ResultsThe average vibration speed level near the first resonance frequency of the engine room panel with a nine-layer energy harvester group is reduced by about 8.7 dB, and the peak value of the frequency response curve shows a broadband reduction. By adjusting the size and position of the added mass, the improved multi-mode energy harvester can participate in the vibration reduction of the structure.ConclusionsCompared with the traditional embedded two-dimensional acoustic black hole structure, the elastic anti-resonant energy harvester proposed herein features small additional mass and non-destructive structural strength, and can be designed in any combination, giving it good application value for targeted ship vibration and noise reduction in the low frequency band.
Jun. 30, 2025Vol. 20 Issue 3 125 (2025)
Wenxi DAI, Wei XIE, Pengcheng HU, Yuansheng CHENG, Pan ZHANG, and Decong LI
ObjectivesIn order to quickly evaluate the ballistic performance of an ultra-high molecular weight polyethylene (UHMWPE) composite sandwich structure, a theoretical analysis model of its resistance to high-speed cylindrical projectile penetration is established.MethodsFirst, the penetration resistance process of the sandwich structure is divided into three stages, the energy dissipation problem in each stage is analyzed, theoretical analysis models are proposed which ignore and consider the upsetting of the cylindrical projectiles respectively, and the equations between the dissipative energy and residual velocities of each stage are built. Next, a numerical model of the projectile resistance of the UHMWPE composite sandwich structure is established using finite element software ANSYS/AUTODYN, and the ballistic limits are obtained by calculating the residual velocities of the projectiles and using the fitting method. Finally, the results of the theoretical analysis models and numerical model are compared.ResultsBased on the numerical model results, the ballistic limit errors of both theoretical analysis models are less than 22%, but the ballistic limit of the theoretical analysis model that considers projectile upsetting has higher calculation precision when the maximum errors, mean errors and correlation coefficients are considered together.ConclusionsThe proposed theoretical analysis models can be applied to effectively calculate the ballistic limits of UHMWPE composite sandwich structures against the impact of cylindrical projectiles, providing valuable references for the penetration resistance calculation of other fibre composite sandwich structures.
Jun. 30, 2025Vol. 20 Issue 3 137 (2025)
Shuangxi XU, Haokun ZHANG, Wei SHEN, Wei LUO, Wei DONG, and Yanhui ZHANG
ObjectivesTo study the mechanical behavior of aluminum alloy sheets for ships under low-speed impact load, horizontal low-speed impact dynamic response tests are conducted on 5059-H116 aluminum alloy plates.MethodsBased on the impact tests, the damage and dynamic response of test plates under different impact speeds and masses are compared. Based on a mixed hardening plastic model, a low-speed impact numerical model is established to numerically simulate the failure process under different impact velocities. The finite element method is used to analyze the influence of specimen size, impact position and impact head shape on critical failure energy, and a modified empirical formula for critical failure energy is proposed.ResultsThe results indicate that with the increase in impact velocity, the critical failure energy of the test plate increases correspondingly, but the increase is very small. Under the same impact energy, different impact masses have no effect on the critical failure energy of aluminum alloy sheets. The sensitivity of critical failure energy on the aspect ratio of the test plate is very small. The critical failure energy of blunt impact test plates with the same cross-sectional area can be considered equivalent. ConclusionsThe results of this study can provide references for research on the low-speed impact mechanical behavior and load-bearing capacity of aluminum alloy sheets.
Jun. 30, 2025Vol. 20 Issue 3 148 (2025)
Mi HU, Yinggang LI, Yufeng GONG, Mao LI, Pengduo ZHAO, Qi WANG, and Xiaobin LI
ObjectiveIn view of the shock resistance performance of warship vibration isolation systems, the shock response of a vibration isolation system with multiple coupling elastic elments is investigated.MethodsFirst, a physical model is established of a vibration isolation system with multiple coupling elastic elements consisting of a vibration isolator, limiter and external flexible pipe connector. The dynamic shock response characteristics of the vibration isolation system are then studied using the finite element method. In addition, the shock test of the vibration isolation system is carried out to verify the finite element model. Finally, the effect of the stiffness of the elastic elements on the shock response characteristics is determined.ResultsThe numerical simulation results of the shock response of the elastic isolation system are consistent with the shock test results, which verifies the feasibility of the elastic isolation system simulation method. With the introduction of flexible pipe connectors, the total vertical stiffness and acceleration response of the vibration isolation system increases, while its displacement response decreases. ConclusionsWith the increase in the nonlinear stiffness of the elastic elements, the displacement response of the vibration isolation system decreases and the acceleration amplitude increases. The nonlinear stiffness of the elastic elements can regulate the shock resistance of the equipment, providing guidance for the shock protection design of ship structural equipment.
Jun. 30, 2025Vol. 20 Issue 3 158 (2025)
Guijie SHI, Qiang LI, and Deyu WANG
ObjectiveThis study aims to indirectly identify tire impact loads and their distribution characteristics by analyzing structural responses, providing a basis for deck design and safety assessment. A load inversion method based on Green's function is proposed.MethodsThe study focuses on the stiffened plate of a ship deck. The impact load is represented as a superposition of unit impulse loads based on Green's function. The Green's function kernel matrix is derived through finite element simulations. An inversion model is formulated by combining the Tikhonov regularization method with the generalized cross-validation (GCV) criterion. For both single and multiple tire impact scenarios, the influence of multi-source loads on inversion accuracy is analyzed. The load distribution characteristics for three typical wheel load distribution forms—convex, saddle, and concave—are inverted by equivalently dividing the force application area and applying unit impulse loads.ResultsThe proposed method effectively identifies the time history and distribution characteristics of tire impact loads, with a relative error of less than 5%. Specifically, the inversion based on strain and displacement responses achieves higher accuracy, with errors below 2%. Even with 5% noise interference, the inversion results remain consistent with the actual loads.ConclusionsThe proposed method addresses the challenges such as short impact load duration, limited structural response range, and multi-source impact load interactions. It provides a novel approach for identifying wheel loads on real ships, with significant engineering applicability.
Jun. 30, 2025Vol. 20 Issue 3 165 (2025)
Huwei CUI, Runwen HU, Zemin CHEN, and Lu HUANG
ObjectivesIn order to accurately evaluate the longitudinal ultimate strength of a hull girder under the cyclic bending moment, the effects of an elastic-perfectly plastic and Chaboche material model on the elastic shakedown and ultimate strength of the hull girder under the cyclic bending moment are studied. MethodsThe nonlinear finite element method is used to carry out the ultimate strength numerical simulation of a double bottom bulk carrier considering the elastic shakedown under the cyclic bending moment. In this study, the Bauschinger effect of the material during the reverse loading of the structure and influence of the welding initial deformation and residual stress are considered. ResultsThe calculation results show that the welding initial deformation significantly reduces the lower limit of the elastic shakedown of bulk carrier, and the range of the elastic shakedown considering welding initial deformation and residual stress is the largest. After reaching the elastic shakedown under the cyclic bending moment, the ultimate strength of the bulk carrier considering the welding initial deformation and residual stress under hogging and sagging states are 7.15% and 5.68% higher than that under single loading respectively. ConclusionsThe welding initial deformation has a major impact on the elastic shakedown interval and elastic shakedown ultimate strength of the bulk carrier, which should be carefully considered in actual research and analysis.
Jun. 30, 2025Vol. 20 Issue 3 174 (2025)
Xuan LIU, Xiangshao KONG, Zhuo WANG, Chongxi XU, and Weiguo WU
ObjectivesThis study investigates long-span, double-deck plate frame structures commonly used in ship construction. The main objectives are: to comprehensively analyze the stability of these structures under axial compression and to develop a method for accurately evaluating their ultimate load-carrying capacity. This research is of great significance as it provides essential technical support for the design and safety assessment of ship structures, ensuring the reliability and safety of ships with long-span double-deck plate frame structures. MethodA comprehensive approach is adopted to achieve these objectives. Firstly, an ultimate strength test is conducted on a specially designed long-span double-deck structure model. The test model is fabricated from Q550 structural steel with detailed dimensions. A closed-frame loading system is utilized during the experiment, along with various measurement devices, including hydraulic jacks, force sensors, and displacement gauges, to accurately record load and displacement data. Additionally, a three-directional resistance strain gauge is used to monitor stress variations at multiple locations on the model. Moreover, the initial defects of the model are measured and incorporated into the analysis, and the mechanical properties of the material are determined through tensile testing. Secondly, numerical simulations are performed using ABAQUS. A finite element model is constructed with proper boundary conditions, and initial defect data are incorporated to improve the simulation accuracy. ResultsThe test results reveal that global buckling involving both the upper and lower decks is the main cause of the failure of the long-span double-deck structure. Pronounced buckling is observed on the upper deck near the loading end, with the deformation gradually propagating toward the side plates. The stress analysis indicates that the axial load is unevenly distributed between the upper and lower decks, with the lower deck carrying a smaller proportion of the load. The load-displacement curve shows that the structure begins to undergo inelastic deformation when the load reaches approximately 500 t, with the ultimate load of 583.4 t. The simulation results show that the simulated load-displacement curve generally agrees well with the experimental curve, although it slightly overestimates the ultimate strength, with an error of 8.5%. Moreover, the simulation shows that both buckling in both the upper and lower decks, which differs from the experimental result of the lower deck. Further analysis reveals that eccentric compression has a significant impact on the failure mode and the ultimate load-carrying capacity of the structure. ConclusionIn conclusion, it is crucial to account for the effect of eccentric compression in practical simulations of long-span double-deck plate frame structures. Including this factor in the analysis improves the accuracy of the evaluation, thereby benefiting the design and safety assessment of ship structures. This research provides a valuable reference for future studies on similar structures and offers practical guidance for shipbuilding engineering.
Jun. 30, 2025Vol. 20 Issue 3 184 (2025)
Wenhua HUANG, Piao LI, Xu LI, and Dong HUANG
ObjectiveIn order to effectively evaluate the safety and integrity of buoyancy material integrated structures in underwater vehicle under service conditions in deep water, the generation and propagation of debonding at the interface between steel and buoyancy materials were studied using experimental and simulation methods. Methods First, the mechanical parameters of the material interface are measured through standard tests and numerical calibration, and a cohesive zone model for stimulating interface failure is constructed. Then, based on finite element simulation, regions of high stress gradients and locations prone to damage are estimated through global stress/deformation analysis, and the expansion path and mode of debonding are determined through submodel simulation. Results Interface debonding tends to occur at the top of the circumferential partition frame within the integrated structure, mainly in I-type, extending along the circumferential direction and towards the outer surface. Conclusions Simulation analysis reveals the interface failure position and evolution, providing a basis for simulating interface failure under complex working conditions and optimizing interface performance in the future.
Jun. 30, 2025Vol. 20 Issue 3 194 (2025)
Yan WANG, Li’an BIAN, Shu XIE, Qi ZHANG, and Gaosheng LI
Objective In order to solve the installation space limitations of shipboard communication devices and the low communication efficiency of shipborne antennas due to interference by signals from other equipment, this paper proposes a miniaturized and high-isolation compact MIMO antenna that can cover a wide frequency band. MethodThe antenna unit is based on an elliptical patch that expands into the final octagonal structure by rotational translation; the four units are placed orthogonally on the dielectric substrate to improve the data transmission rate and channel capacity of the antenna; and adding a square metal patch to the back of the antenna improves the isolation between antenna units, while the overall size of the antenna is only 32 mm×32 mm×1.6 mm. Results The results show that the impedance bandwidth of S11 ≤ -10 dB is measured as 3.4-10 GHz; the S31 of the antenna drops from about -15 dB to less than -22 dB with a lowest point of -46 dB, improving isolation by 31 dB; and the antenna envelope correlation coefficient is less than 0.05, the diversity gain is greater than 9.7 dB and the highest gain of the antenna can reach 4.5 dBi. ConclusionOn the basis of miniaturization, the MIMO antenna can cover a wide frequency band and has a high degree of isolation, strong anti-interference ability and high channel capacity, enabling it to be widely used in shipborne wireless communication equipment.
Jun. 30, 2025Vol. 20 Issue 3 265 (2025)
Lijun TANG, Yunxia FAN, Xingyu ZHOU, and Qian SUN
ObjectiveTo address the challenges of complex underwater environments, particularly the uncertainties in ocean currents, this study proposes an improved sparrow search algorithm (ISSA) for autonomous underwater vehicles (AUVs) path planning. The goal is to enhance the efficiency and robustness of path planning by minimizing navigation time and improving path stability in uncertain conditions. MethodThe proposed ISSA incorporates several key enhancements to the classic sparrow search algorithm (SSA). First, a vector analysis method is developed to evaluate interval responses, allowing the algorithm to effectively handle uncertainties in ocean currents. By modeling the uncertain ocean currents as intervals, the algorithm can accurately calculate the energy consumption and navigation times for different paths. Second, the ISSA introduces segmented learning and quantum mechanisms to improve global search capabilities. These mechanisms enable the algorithm to dynamically adjust its search strategy by learning from both elite and marginal individuals within the population, thereby enhancing diversity and preventing premature convergence. Third, a Cauchy-Gaussian mechanism is integrated into the update formula to balance global exploration and local exploitation during the search process. Finally, the population size is dynamically updated using Thompson sampling, allowing the algorithm to adaptively allocate computational resources based on the complexity of the environment. Results Simulation results demonstrate that the ISSA significantly outperforms the original SSA and other state-of-the-art algorithms, such as particle swarm optimization (PSO), differential evolution (DE), artificial bee colony (ABC), and whale optimization algorithm (WOA). Specifically, the ISSA reduces the average maximum navigation time by 49.88% compared to the original SSA and decreases the failure rate in extreme ocean current conditions by 10.6%. The ISSA also exhibits superior convergence speed, achieving near-optimal paths in approximately 20 iterations, while other algorithms require around 40 iterations to approach the global optimum. Moreover, the ISSA shows a lower average fitness value, indicating better optimization performance and path planning efficiency. Conclusion The ISSA demonstrates strong global search capabilities and robustness in dynamic and uncertain underwater environments, making it a promising solution for AUV path planning. The improvements in convergence characteristics and the ability to handle complex ocean currents highlight the algorithm's potential for practical applications. Future work will focus on further optimizing the computational efficiency of ISSA and exploring its application in more diverse and challenging underwater scenarios.
Jun. 30, 2025Vol. 20 Issue 3 275 (2025)
Yuankui LI, Jiyuan SUO, Dongye YU, Xinyu ZHANG, Fang YANG, and Xuefeng YANG
Objectives In order to meet the development requirements of intelligent shipping and the domestication of meteorological navigation in China, a ship multi-objective route planning method based on the fusion of A* and non-dominated sorting genetic algorithm II (NSGA-II) is proposed that can adapt to complex and diverse long-distance navigation tasks.MethodsBy incorporating the A* algorithm into NSGA-II to guide the search direction and accelerate the convergence speed, an environmental data model and objective functions are constructed. Simulation verification is then performed using the trans-Pacific route. ResultsThe simulation results demonstrate that the proposed model and algorithm can obtain a uniformly distributed and diversified Pareto optimal route set. All routes can successfully avoid areas with severe weather conditions, and the most suitable route for the ship can be selected according to the decision-makers' needs. ConclusionIn summary, the proposed method can be applied to optimize ship ocean routes under multiple constraint conditions and identify routes that meet the voyage objectives, thereby reducing operational costs, improving shipping efficiency and providing support for ship meteorological navigation and future intelligent ship navigation.
Jun. 30, 2025Vol. 20 Issue 3 288 (2025)
Zhechao YANG, Liqun REN, Changhong ZHI, Yunxiang YOU, and Hongwei WANG
ObjectivesAiming at the problem of the identifiability of underwater vehicle wave trails in synthetic aperture radar (SAR) images in a density stratified environment, this study establishes a theoretical solution model and quantitative analysis method. MethodBased on the statistical information of ocean stratification characteristics, a theory of internal waves induced by equivalent sources of moving mass and momentum is designed. The modulated wave spectrum of each statistically independent sea surface unit and the corresponding intensity distribution mapped in the SAR images are calculated, and then the texture feature information of the internal wave trails in the images is extracted based on the gray level co-occurrence matrix. ResultsThe results show that under specific parameter conditions, the identifiable interval of internal wave trails in SAR images occurs when the maximum buoyancy frequency is greater than 0.02 rad/s and the corresponding depth is less than 100 m. ConclusionThe proposed method can be used to effectively calculate and analyze the identifiability of internal wave trails in any density stratified environment, providing a basis for underwater target detection.
Jun. 30, 2025Vol. 20 Issue 3 296 (2025)
Pengjiu WANG, Junbin Gong, Wei LUO, Xiao HUANG, and Junjie GUO
Objective With technological advancements and the increasing demand for water resource exploration, water surface target detection plays a crucial role in various applications, such as ship navigation and maritime safety. However, conventional detection methods encounter several challenges, and existing deep-learning-based algorithms have limitations in this field, including limited datasets and insufficient detection speed even after improvement. This study aims to develop an improved object-detection algorithm based on Deformable DETR for automatic recognition of water surface targets. The algorithm is designed to significantly enhance the inference and training speed of the model while improving detection accuracy, thus achieving more efficient and robust detection of water surface targets. Methods Firstly, a new water surface target dataset was constructed. Then, the original feature-extraction network of Deformable DETR was replaced with the lightweight MobileNetV3. MobileNetV3 is available in multiple versions and is a lightweight network with high recognition accuracy and small model parameters. MobileNetV3-Small version was chosen as the feature-extraction backbone. It has a series of operations, including depth-separable convolution, as well as SE modules and the Hard-swish activation function. To further reduce the model size and enhance the detection ability, three output feature maps from specific modules of MobileNetV3-Small were directly used for multi-scale feature extraction. Secondly, the CBAM attention mechanism module was introduced. CBAM is a lightweight yet versatile module that integrates both channel attention and spatial attention, allowing it to be seamlessly incorporated into the network. By replacing the SE module in MobileNetV3 with CBAM, the model's feature extraction capability was further improved. CBAM's channel attention module applies both average pooling and max pooling to the input feature map, followed by a shared neural network and a Sigmoid function to generate channel-attention features. The spatial attention module first applies pooling operations along the channel dimension of the feature map refined by the channel attention module, followed by convolution and Sigmoid activation to obtain spatial attention features. Finally, the improved Deformable DETR network was obtained by integrating MobileNetV3 and the CBAM attention mechanism module. The input image processed by the the MobileNetV3-Small network embedded with CBAM, from which three multi-scale feature maps are extracted. These feature maps are further refined and then fed into the Transformer structure of the Deformable DETR for further processing. Results Ablation experiments were carried out on the self-constructed dataset and the ABOships dataset. On the self-constructed dataset, compared with the original Deformable DETR model, the improved algorithm reduced the model's parameter count and size to about one-third. The mAP0.5:0.95 increased by 2.4%. Training time was reduced to 41.7% of that required by the original algorithm. On the ABOships dataset, the mAP0.5:0.95 increased by 7.5%, and the training time was reduced to 51.9% of that required by the original. During training, the model's loss function exhibited faster and more stable convergence. In the comparison tests with other common algorithms (YOLOv3, Faster R-CNN, Mask R-CNN) on the ABOships dataset, the improved algorithm demonstrated superior performance. For mAP0.5, it reached 50.0%, higher than the other algorithms. For mAP0.5:0.95, it was 21.7%, leading in fine-grained detection. The model's parameter count was only 12.9 M, much lower than other models, indicating high parameter efficiency. Although the frame rate was slightly lower than that of YOLOv3 and Faster R-CNN, it was significantly higher than that of Mask R-CNN, maintaining a reasonable processing speed while ensuring high detection accuracy.ConclusionsThe improved Deformable DETR algorithm proposed in this paper effectively improves the performance of water surface target detection. It substantially reduces the model's parameter count and storage footprint, accelerates the training and inference speed, and enhances the recognition accuracy. The experimental results on different datasets verify the effectiveness of the algorithm. This study explores a novel approach to applying DETR-class algorithms in water surface target detection, indicating their potential in this field.
Jun. 30, 2025Vol. 20 Issue 3 305 (2025)
Xusheng YUE, Jun LI, Yaohong WANG, Penghao ZHU, Zhexing WANG, and Xuanhao XU
ObjectiveTo address the challenges of false detection and missed detection in identifying floating bottles on the water surface in unmanned surface vehicle applications, this study proposes an improved small floating object detection algorithm based on YOLOv5s. Method First, data augmentation was performed on the Flow-Img dataset to expand the data and avoid model overfitting. Second, to enhance detection accuracy of the deep learning model for extremely small objects, an additional detection layer was introduced beyond the original three in YOLOv5s, while the detection head for large objects was removed to avoid anchor box allocation issues caused by data imbalance. Third, the CBAM (Convolutional Block Attention Module) was incorporated into the backbone network to address the limited feature extraction capability for detecting floating bottles on the water surface. Finally, the Normalized Wasserstein Distance (NWD) regression loss function was introduced and combined with the IoU loss function in a weighted manner to construct a comprehensive regression loss function, further enhancing detection accuracy for floating bottles on the water surface.ResultsExperimental results show that the proposed algorithm achieves a mAP@0.5 of 95.7% in detecting floating bottles on the water surface. Compared to the original YOLOv5s, the improved model increases mAP@0.5 by 2.6%, mAP@0.95 by 4.5%, and reduces the number of parameters by 61.9%.Conclusion While maintaining a lightweight architecture, it delivers more accurate detection results for surface floating bottles, offering a valuable technical reference for small floating object detection on the water surface.
Jun. 30, 2025Vol. 20 Issue 3 318 (2025)
A multi-object tracking algorithm for cleaning vessels to track floating debris based on YOLOv5-Byte
Heping YUAN, Bo ZHOU, and Bijin LIU
ObjectiveAiming at the problems of easy switching of tracking ID (identity) and low accuracy caused by complex scenes, including platform shaking and small object due to long distance during autonomous collection of surface floating debris by cleaning vessels, a multi-object tracking (MOT) method based on improved YOLOv5-Byte was proposed.MethodFirst, the Byte data association model was integrated with the YOLOv5 detector to construct the MOT algorithm. Secondly, aiming at the problem that CIoU (complete intersection over union) in YOLOv5 is sensitive to small objects, the normalized Wasserstein distance metric is proposed for the boundary box Gaussian modeling. Then, the balance factor is introduced to adjust the contribution of CIoU and normalized Wasserstein distance measures to the loss function to adjust the sensitivity of the detector to small objects. Finally, IoU (intersection over union)is introduced into the adjustable hyper-parameter in the form of a power exponent in the Byte data association model to reduce the risk of small objects being discarded due to low confidence.Results The experimental results on the surface floating debris dataset showed that the tracking assessment metrics IDF1 (identification F1 score) and MOTA (multiple object tracking accuracy) increased by 11.5% and 8.7%, respectively, while the number of IDs (identity switches) decreased by 7 compared to the algorithm before improvement. ConclusionThe proposed algorithm achieves accurate tracking of multiple small objects on the water surface, providing a reference for the autonomous debris collection technology of intelligent floating cleaning vessels.
Jun. 30, 2025Vol. 20 Issue 3 327 (2025)
Li SU, and Shihao CUI
ObjectiveIn order to solve the problems of the insufficient brightness enhancement, low sharpness, and color distortion of existing maritime low-light image enhancement algorithms, this paper proposes an algorithm based on improved self-calibrated illumination (SCI) learning. MethodAn attention mechanism is introduced to enhance the unevenly illuminated regions in low-light images to different degrees; an illumination adjustment module is constructed to secondary the intermediate outputs of the illumination learning process; a denoising module is introduced to ameliorate the problem of noise in dark regions being amplified with the enhancement of the brightness; and batch normalization (BN) is changed to batch channel normalization (BCN), which utilizes channel and batch dimensions to adaptively combine the normalized outputs. Image quality is then evaluated in both subjective and objective aspects. ResultsExperiments are conducted under three testing datasets. The results show that when compared with the original unimproved algorithm, the improved algorithm not only improves the image brightness, but also provides higher color richness and no color distortion, while improving the standard deviation by an average of 20.01%, reducing the natural image quality evaluation by 9.16%, and improving the average gradient and information entropy by 23.68% and 6.46% respectively.ConclusionThe improved algorithm represents a breakthrough in image visual quality, enabling the better enhancement of maritime low-light images in different environments.
Jun. 30, 2025Vol. 20 Issue 3 339 (2025)
© Copyright 2018-2021 | Chinese Laser Press.
All Rights Reserved 沪ICP备15018463号-20