





Please enter the answer below before you can view the full text.


2025
Volume: 20 Issue 2
33 Article(s)

Xin YU, Jiantao YANG, Yanping HE, Liansong NI, Youjiang WANG, and Yadong LIU
ObjectiveAs the hydrodynamic performance of a positioning bow type self-propelled cutter suction dredger (CSD) is significantly different from that of an ordinary ship, this paper analyzes its performance in order to assist in the rational selection and design of stern lines.MethodsFirst, the computational fluid dynamics (CFD) method is applied to carry out simulation verification and model resistance test validation. On this basis, the hydrodynamic performance of two hulls with different stern shapes, namely twin deadwood and twin skeg, are compared and analyzed in aspects including calm water resistance behavior, stern wake field, axial wake fraction, and nonuniform level of axial wake field. ResultsThe total resistance coefficient of the twin skeg hull is lower than that of the twin deadwood hull at each target speed. At the design speed, the total resistance coefficient of the former is 8.6% lower than that of the latter, while the wake object function (WOF) of the latter is judged to be better than that of the former by 11.0% in terms of nonuniform level of axial wake field. ConclusionThe results of this study can provide valuable references for the line design and optimization of similar hull types.
Apr. 28, 2025Vol. 20 Issue 2 166 (2025)
Shixian WU, Minzhan HUANG, Jiadong YIN, Xuan MEI, Minli ZHOU, and Pengnan SUN
ObjectiveScientific research vessels may encounter extreme sea conditions during research voyages. It is of great significance to study the slamming load and fluid splashing characteristics of scientific research vessels under extreme sea conditions to ensure the safety of scientific personnel and the performance of scientific equipment. MethodsThe article takes the Sun Yat-sen University scientific research vessel as an example, based on the smoothed particle hydrodynamics (SPH) method, establishes a δ-SPH and fluid structure coupling dynamic model, and carries out SPH numerical simulation of the scientific research vessel encountering extreme sea conditions. It predicts the slamming load, the degree of deck wetness and fluid splashing under extreme sea conditions, and analyzes its influencing factors and physical mechanisms.ResultsThe results indicate that as the wave height increases and the wavelength approaches the captain, the slamming load on the hull increases, and the degree of deck wetness and fluid splashing becomes more significant. ConclusionThe results provide a basis for maneuvering and controlling scientific research vessels under extreme sea conditions, ensuring the safety of personnel and equipment performance on scientific research vessels.
Apr. 28, 2025Vol. 20 Issue 2 175 (2025)
Yue GU, Renchuan ZHU, Chuanqing LI, and Chengyu WU
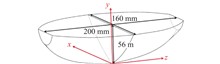
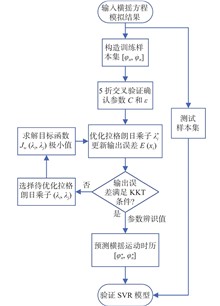
ObjectiveAiming at the nonlinearity of trimaran rolling, a system identification modeling method combining CFD and support vector regression (SVR) is proposed. MethodsBased on the STAR-CCM+ platform, numerical simulations of forced rolling motion of the trimarans with different lateral layouts are performed. Then the SVR method is used to identify the parameters of the hydrodynamic moment history curve and calculate the additional mass and damping coefficient of the hull at different frequencies. ResultsThe results show that the damping coefficient of the trimaran shows strong frequency dependence; the nonlinear characteristics of the damping are profound at low frequencies, and the damping component of the bilge keel accounts for a large proportion. ConclusionCompared with potential theory, the proposed SVR method can accurately capture the nonlinear characteristics of the trimaran's rolling motion, and better account for the flow interactions between hulls.
Apr. 28, 2025Vol. 20 Issue 2 187 (2025)
Jie ZHU, Zailiang LIU, Yan LIN, and Wei CHAI
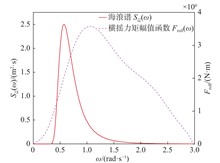
ObjectiveIn this work, two stability failure models, i.e., the dead ship condition and parametric roll are selected in order to study and evaluate ship stability as well as safety at seas. MethodsSpecifically, roll motion equations are established for the dead ship condition and the parametric roll condition, respectively. Subsequently, these equations are coupled with the linear filter, and the roll responses time histories under time random seas are obtained by solving the coupled equations using the Runge Kutta method. The stochastic process X(t) is defined as the absolute value of the roll response, and the average conditional exceedance rate (ACER) method is employed to predict the extreme value distribution of X(t). ResultsThe results show that the ACER method can provide effective predictions of the extreme value distributions for the roll response under the dead ship condition and the parametric roll condition. The exceedance probability for the stochastic process X(t) at the critical level (e.g. the flooding angle), can be applied as an effective index to evaluate ship capsizing at seas. ConclusionExtreme value prediction of the roll motion by application of the ACER method could be an important reference to evaluate ship stability at seas.
Apr. 28, 2025Vol. 20 Issue 2 196 (2025)
Jiawei XU, Tianyi HANG, Zehao LIANG, Daobin CHANG, Shi HU, and Haichao LI
ObjectiveIn response to the analysis requirements of the vibration and noise caused by the impact of amphibious aircraft entering the water, this paper studies the influence of forward speeds and entry angles on the water entry impact vibration and noise of amphibious aircraft. MethodsFirst, based on the arbitrary Lagrangian-Eulerian (ALE) algorithm, a finite element model of an amphibious aircraft is established and its motion characteristics in the water entry impact stage under different forward speeds and water entry angles are analyzed. Next, based on the statistical energy snalysis (SEA) method, a SEA model of an amphibious aircraft is established and its water entry impact vibration and noise characteristics are studied, as well as the influence of forward flight speed and entry angle. ResultsThe results show that the lower the water forward speed, the smaller the response of the amphibious aircraft to the hydrodynamic impact, the less roll and the slower the longitudinal velocity decrease. The noise in the cockpit of the amphibious aircraft shows a trend of reducing across the entire frequency range. The effect of water entry angle on cockpit noise is not significant. Compared with other angles, the water entry angle of 4° has the greatest impact on the hydrodynamic impact of the amphibious aircraft, but the best lateral stability. ConclusionBy controlling the appropriate forward speed and water entry angle, the water entry attitude and cabin noise control can be taken into account.
Apr. 28, 2025Vol. 20 Issue 2 203 (2025)
Jingmiao MENG, Peng YANG, Jincheng LI, and Jingxi LIU
ObjectiveThe aim of this paper is to study the influence of wave height on nonlinear wave loads on ships.MethodsA 20000 TEU container ship is selected as the research object. First, numerical research on ship wave loads under different wave heights is carried out. Based on the rigid body theory, the three-dimensional boundary element method and inner and outer region matching method (IORM) are adopted to calculate the velocity potential and wave excitation forces, and convergence analysis of the free surface range and grid division is also performed. Furthermore, the nonlinear factors of wave excitation force caused by the wetted surface and the hydrostatic restoring force are considered. A three-dimensional nonlinear time-domain method is employed to analyze the effects of these nonlinear factors on ship motion and wave loads under different wave heights. ResultsThe results show that the nonlinearity of wave loads on the ship's sectional profile is more pronounced than that of ship motion, and the ship's second-harmonic response increases with wave height.ConclusionsThe second-harmonic phenomenon of nonlinear wave loads is mainly caused by the interaction of the nonlinear wave excitation force due to the changing wetted surface and the hydrostatic restoring force. This phenomenon significantly affects the magnitude of wave loads, the number of load cycles, and structural fatigue damage. Therefore, it is necessary to consider the second-harmonic response components of ship loads in the engineering design stage to enhance ship safety.
Apr. 28, 2025Vol. 20 Issue 2 214 (2025)
Mingfeng WU, Renchuan ZHU, and Dekang XU
ObjectiveIn order to rapidly forecast added wave resistance in the ship design stage, this paper proposes a neural network based on point cloud feature extraction. MethodsTaking the Series 60 as an example, the corresponding added wave resistance prediction model is set up and compared with the traditional model based on the principal design parameters. By referring to S60 ship tests, the characteristics of the point cloud prediction model in terms of accuracy and stability are discussed, as well as the method of pre-training and optimizing the model using ship calm-water resistance data. ResultsThe prediction results indicate that the proposed model can perform well in all five S60 ships, with the coefficient of determination R2 ranging from 0.74 to 0.90, while the traditional model based on the design parameters fails to make the correct prediction in some case. ConclusionThis study provides new insights and a new approach to predicting added resistance in ship design, and may help to optimize ship forms by fully considering the impact of added wave resistance in the design phase.
Apr. 28, 2025Vol. 20 Issue 2 227 (2025)
Zhengyuan ZHANG, Chong WANG, Wei CHAI, and Chunbao LI
Objective Articulated multiple floating structures are not only subject to wave excitation forces, but also to other nonlinear loads such as connection forces, mooring forces and diffraction forces between floats, making it challenging to predict their motion.MethodsThis paper uses hydrodynamic analysis software AQWA to establish a numerical motion model for multiple floating structures under mooring and articulated conditions. A comparative study is conducted on a moored single floating box to validate the numerical method. The motion response and mooring tension of the double floating box system is then explored under wave loads. Finally, the motion laws of articulated multiple floating systems are summarized and analyzed. ResultsWhen the length of the connecting components is too short, the hydrodynamic interference between the two floating boxes is severe. Both the heave and roll motions of the floating boxes gradually decrease as the stiffness of the connecting components increases. Even a small increase in stiffness causes a sharp reduction in the roll motion of the floating box. However, the roll angle stabilizes at a certain value and does not change further with an increase in stiffness. Mooring tension is contrary to the motion response of the floating boxes. ConclusionsThe discovery of the motion characteristics of articulated multiple floating structures under mooring conditions can provide useful references for the design of multiple floating structures in marine environments.
Apr. 28, 2025Vol. 20 Issue 2 235 (2025)
Ke WU, Jun WU, Qiming SHU, Weiming SHEN, and Wenbin SONG
ObjectivesDeep learning has shown great potential in the field of rotating machinery fault diagnosis. Its excellent performance heavily relies on sufficient training samples. However, in practical engineering applications, acquiring sufficient training data is particularly difficult, resulting in poor generalization capability and low diagnostic accuracy. Therefore, few-sample fault diagnosis methods, which can effectively extract fault-related information from limited data, have gradually become a research focus in both academic and engineering circles. MethodIn this paper, the latest achievements in few-sample fault diagnosis of rotating machinery are reviewed and summarized. This paper describes the definition and learning methods for few-sample fault diagnosis. Few-sample fault diagnosis methods aim to effectively develop fault diagnosis models with strong generalization capability under limited training data conditions. Currently, according to different technical principles, existing few-sample fault diagnosis methods can be classified into five categories: meta-learning, transfer learning, domain generalization, data augmentation, and self-supervised learning. Subsequently, this paper elaborates on the applications of these five methods in rotating machinery fault diagnosis. Meta-learning-based fault diagnosis methods improve the ability of models to rapidly learn and adapt to new tasks by acquiring common knowledge from multiple related tasks. The transfer learning-based fault diagnosis methods achieve knowledge migration from the source domain to the target domain using unsupervised domain adaptation techniques. The domain generalization-based fault diagnosis methods train models using single or multiple source domains and enable the model to learn features that are common across those domains. The data augmentation-based fault diagnosis methods expand the original dataset by generating models. The self-supervised learning-based fault diagnosis methods exploit the structural information of data to construct pseudo-labels. ResultsThe paper summarizes the core ideas, advantages, and limitations of these five methods. Meta-learning can improve the model's generalization capability but may require significant computational resources. Transfer learning can improve learning efficiency but is limited by domain similarity. Domain generalization can enhance the model performance in unknown domains but may suffer from overfitting issues. Data augmentation can increase dataset diversity but may generate inconsistent samples. Self-supervised learning can utilize unlabeled data but faces challenges such as complex task design and potential overfitting. ConclusionsIn the future, data governance, multimodal learning, federated learning, and mechanism-data hybrid-driven methods should be further explored in the field of few-sample fault diagnosis. It will overcome the limitations of existing methods and further improve the reliability of few-sample fault diagnosis.
Apr. 28, 2025Vol. 20 Issue 2 3 (2025)
Renjie ZHU, Enzhe SONG, Chong YAO, and Yun KE
ObjectiveThe background noise in the engine room during actual ship navigation leads to the poor accuracy in fault diagnosis methods. To address this issue, this paper proposes a ship motor fault diagnosis method based on complementary ensemble empirical mode decomposition (EEMD) with adaptive noise (CEEMDAN) and a Bayesian residual efficient channel attention network (BRECAN). MethodsFirst, the noisy motor fault signal is decomposed into multiple intrinsic mode components (IMFs) through adaptive noise CEEMDAN, the noise dominant signal and information dominant signal in the IMF are divided on the basis of detrended fluctuation analysis, and empirical wavelet transform (EWT) is used to de-noise the noise dominant signal. Next, the BRECAN network is constructed, based on the principle of Variational Bayesian (VI-Bayesian ) using the network parameters instead of the traditional network point estimation training method, the parameters are built to simulate the interference of synthetic noise on the model training, and the network is guided by the Residual Efficient Channel Attention (RECA) module to extract the fault difference features. Finally, the effectiveness of the method is verified via a motor fault simulation experimental platform.ResultsThe results show that the proposed method can achieve the accurate diagnosis of ship motor faults under strong noise conditions while still maintaining a diagnostic accuracy of over 90% under signal-to-noise ratio of -12 dB.ConclusionThe results of this study can provide valuable references for the diagnosis of ship motor faults under strong noise conditions.
Apr. 28, 2025Vol. 20 Issue 2 20 (2025)
Qianming SHANG, Wanying JIANG, Yi ZHOU, Zhengqiang WANG, and Yubo SUN
ObjectivesTo address the performance degradation in fault diagnosis of rotating machinery caused by noise interference in practical applications, a novel fault diagnosis approach based on Mel-frequency cepstral coefficients (MFCC) and a parallel dual-channel convolutional neural network (PDCNN) is proposed. This method aims to improve the quality of fault feature extraction from vibration signals and enhance fault diagnosis capabilities under noisy conditions. MethodsThe MFCC is used to extract features from vibration signals contaminated by noise. Meanwhile, a novel parallel dual-channel convolutional neural network structure is designed to explore both global features and deeper, finer details of the data, thereby enhancing the diagnostic performance of the method in strong noise environments.ResultsExperimental evaluation results under different noise conditions show that the proposed method achieves a fault diagnosis accuracy of over 98% in environments with strong noise. Its robustness to noise and diagnostic performance significantly surpass traditional methods. ConclusionThe findings of this study can provide valuable references for gearbox fault diagnosis in environments with strong noise.
Apr. 28, 2025Vol. 20 Issue 2 30 (2025)
Xiaoqi WANG, Ke WU, Guanhui ZHAO, and Jun WU
ObjectiveAiming at the problem of insufficient feature extraction in traditional neural networks under strong noise interference, a new global attention residual shrinkage network is proposed for accurate diagnosis of piston pump faults in complex environments. Methods First, data segmentation is performed on the original signals. Then, a new global feature extractor with an attention mechanism is established to extract fault-related features from the signals, while a threshold softening mechanism is introduced to minimize noise interference. Back propagation optimization is then performed on the network model to reduce loss and improve the model's diagnostic performance. Finally, the feature extraction results are input into the fault classifier for fault identification. The effectiveness of the proposed method is verified by using a piston pump fault simulation test bed. Results The results show that, compared with other models, the established global attention residual shrinkage network model has higher diagnostic accuracy and stronger anti-interference ability. Conclusion The proposed method demonstrates accurate fault diagnosis in complex and harsh environments.
Apr. 28, 2025Vol. 20 Issue 2 39 (2025)
Xuewei SONG, Zhiqiang LIAO, and Baozhu JIA
ObjectiveThe working environment of marine fire pump motor bearings is complex with low fault diagnosis accuracy. To address these issues, this study proposes a fault feature enhancement and diagnosis method for marine fire pump motor bearings based on adaptive steady-state subspace analysis (SSA) and improved Teager energy operator (TEO). Methods First, the traditional SSA algorithm is optimized to adaptively determine the dimensionality of the Hankel matrix by the false nearest neighbor method, and non-stationary signals with the best fault features are extracted from the vibration signal through kurtosis. Second, by improving the TEO algorithm, the proportion of fault feature information in the vibration signals is increased, fault features are enhanced and faults are diagnosed. Finally, the effectiveness of the method is verified through simulation and engineering experiments. ResultsThe proposed method can accurately distinguish the fault characteristic frequency and harmonics of bearings, and accurately diagnose bearing faults.ConclusionThe results of this study can provide references for the fault diagnosis of marine pump motor bearings.
Apr. 28, 2025Vol. 20 Issue 2 47 (2025)
Zhiqiang LIAO, Zhende HUANG, Xuewei SONG, Guanlong LIANG, and Baozhu JIA
ObjectiveMarine water pump bearings operate in complex environments, and the fault features in the acquired signals are easily submerged by noise, resulting in low fault diagnosis accuracy. This paper proposes a Butterworth mean filtering Markov transition field (BM-MTF) technique combined with the ResNet-18 network to solve the problem. MethodsFirst, the BM filter is employed to improve the fault impulse waveform of the signal, suppressing noise interference and amplifying fault characteristics. Then, a two-dimensional image is generated through MTF to effectively visualize and enhance the signal characteristics. The MTF images, after BM filtering, are input into the ResNet-18 network for fault diagnosis. Finally, the method is verified using the public bearing fault dataset from Case Western Reserve University, the laboratory bearing fault dataset, and marine water pump bearing fault dataset, with comparisons to other methods. ResultsThe proposed method demonstrates a 100% accuracy on three bearing fault datasets. The comparative experiments show that the proposed method can effectively extract fault features and achieves higher recognition accuracy. ConclusionThis paper presents a novel method for fault diagnosis of marine water pump bearings.
Apr. 28, 2025Vol. 20 Issue 2 56 (2025)
Chun GE, Zaoyu YAN, Jiatong SHANG, and Hongtao XUE
ObjectivesAiming at the problems that the symptom parameters from monitoring signals in a single analysis domain fail to fully characterize the operating state of the monitored object, and the model parameters of the Extreme Learning Machine (ELM) network are difficult to achieve the optimization, a fault diagnosis method for ship motor bearings is proposed, based on multi-domain information fusion and an improved ELM. Methods First, a multi-domain feature parameter set was constructed from the vibration signals of ship motor bearings in the time domain, frequency domain and time-frequency domain. This set served as the input to the fault diagnosis model. The sparrow search algorithm was then used to optimize the model parameters of the ELM network by determining the optimal weights and thresholds, thus enhancing the fault diagnosis accuracy of ELM model. Finally, the fault states of motor bearings were identified using experimental data from a self-built test bench and open-source experimental datasets. Results Experimental data verification based on the marine motor test bench demonstrated that the fault diagnosis model using multi-domain feature parameter sets, achieved a recognition accuracy of 100% on both the training and test sets. Verification with open-source experimental data showed that the recognition accuracy on the test set for the improved ELM model was 90.5%, which is 12.7% higher than that of the original ELM model. Additionally, the recognition accuracies on both training and test sets were higher than those of other diagnostic models. Conclusions This study has improved the input symptom parameter set and the diagnosis model. The proposed method can effectively identify the fault states of motor bearings and demonstrates good model stability, providing a valuable reference for fault diagnosis of ship motor bearings.
Apr. 28, 2025Vol. 20 Issue 2 68 (2025)
Weibo LI, Feng GAO, Peng XIAO, Kangzheng HUANG, Daojie RUAN, and Junzhuo GAO
ObjectiveThe marine diesel generator (DG) power distribution system is crucial for ship navigation. However, due to the harsh marine environment, frequent failures occur. Therefore, a fault diagnosis method based on whale optimization algorithm-optimized random forest (WOA-RF) is proposed for the marine DG power distribution system.MethodsThe marine DG power distribution system model is built using Matlab/Simulink simulation software. First, fault and normal condition data are collected. Then, the collected data is normalized, time-domain features are extracted, and important features are selected using random forest to reduce data dimensionality. Finally, the WOA-optimized random forest model is used for fault identification, diagnosis and classification.ResultsSimulation results show that the WOA-RF method can identify fault and normal states with 100% accuracy. It can classify 12 different fault types with an accuracy of 98.26%. In the original dataset, the accuracy of WOA-RF improved by at least 4.86% and by up to 34.37% compared to nine different algorithms. In the dataset with 10 dB noise, the accuracy of WOA-RF improved by at least 2.43% and by up to 18.40% compared to six different algorithms.ConclusionThe WOA-RF-based fault diagnosis method demonstrates superior accuracy and robustness in complex marine environments, providing a reliable solution for fault identification in marine power systems.
Apr. 28, 2025Vol. 20 Issue 2 77 (2025)
Weibo LI, Maojie ZHANG, Chenghu XU, Hao ZHANG, and Hualiang FANG
Objective In order to improve the rapidity and accuracy of fault location for island and reef power supply systems composed of multiple distributed power sources, a fault location method based on an immune model and improved immune algorithm is proposed. Methods First, the immune model is used to divide the island and reef power supply system into several cell sections containing monitoring points. According to the monitored fault current signal, the cell section where the fault point is located is determined in order to minimize the fault determination range. The fault points of the cell section are then coded and the antibody population is generated by the improved immune algorithm, enabling the fault section to be quickly and accurately located for a second time, thus greatly reducing the calculation load.Results According to the Matlab simulation results of a typical island and reef power supply system, the immune model and improved immune algorithm combination can realize rapid fault location under various fault conditions, with such advantages as high positioning accuracy, light calculation load and fast solution speed. Conclusion The results of this study can provide useful references for the design of island and reef power supply systems.
Apr. 28, 2025Vol. 20 Issue 2 89 (2025)
Health status assessment for ship diesel engines based on LSTM prediction and cloud barycenter model
Nanyang ZHAO, Chao LIU, Wenlong DU, and Dongxiang JIANG
ObjectiveIn response to the development needs of smart engine rooms on ships, this paper proposes an assessment method for the health status of ship diesel engines. The method is based on long short-term memory (LSTM) neural network prediction and cloud barycenter evaluation, aiming to enhance the operation and maintenance (O&M) capabilities of the engines. MethodsFirst, an evaluation indicator parameter set is constructed based on the deviation between LSTM-predicted and measured parameters. Then, the analytic hierarchy process is used to construct parameter weights, and the cloud barycenter evaluation method is employed to assess the health status of the diesel engine. Finally, tests are conducted using actual ship diesel engine data from both the early normal and later degradation periods. ResultsThe results indicate that the evaluation value of the diesel engine in the early normal state is 99.94 (healthy), while in the later degradation state, it is 81.71 (good), achieving the goal of health status assessment.ConclusionThe proposed method can be applied to the health status assessment of ship diesel engines and other power equipment, offering practical application value.
Apr. 28, 2025Vol. 20 Issue 2 99 (2025)
Liuyang SONG, Chuanhao ZHENG, Ye JIN, Tianjiao LIN, Changkun HAN, and Huaqing WANG
ObjectiveTo achieve the remaining life prediction of bearings in ship mechanical equipment, a multi-task gated networks prediction model based on the Bidirectional Gated Recurrent Unit (BiGRU), Variational Autoencoder (VAE), and Multi-gate Mixture-of-Experts (MMoE) is proposed. MethodsFirst, the time-domain features of the bearing signals are calculated to characterize the basic degradation trends in the monitoring data. Then, a multi-task gated networks prediction model composed of bearing Health State (HS) assessment and Remaining Useful Life (RUL) prediction subtasks is established. In the subtasks, BiGRU and VAE are used to extract the degradation information from the trend signals of the time-domain features, and then MMoE is utilized to adaptively separate the distinctive features of the subtasks. Finally, the effectiveness is verified on the XJTU-SY bearing dataset.ResultsThe results show that, compared with classic time-series data prediction models such as Long Short Term Memory (LSTM), the multi-task gated networks prediction model has higher prediction accuracy, with the error metrics Mean Absolute Error (MAE) and Root Mean Square Error (RMSE) improved by 62.5% and 67.81% respectively. ConclusionThe proposed method can achieve the prediction of the remaining life of bearings and has certain reference value for the health management and intelligent operations and maintenance (O&M) of ship mechanical equipment.
Apr. 28, 2025Vol. 20 Issue 2 107 (2025)
Ziyang LIU, Ling SUN, Feng SUN, Shuai SHEN, and Guanhua DONG
Objectives In the face of unstable network environments at sea, this study aims to develop a novel information integration model and method to improve data transmission efficiency and reduce communication costs. Methods This study introduces a distributed information integration method based on the "request-response" model, which is combined with the effective organization and management of information elements. By precisely defining the structure of information elements, the efficient acquisition of metadata and the creation of platform metadata databases were achieved. Furthermore, the study involves the design of an information identifier resolution system, metadata mapping configuration, and a dynamic parsing compiler for SQL statements, effectively addressing the issue of semantic heterogeneity and achieving seamless data integration between different software systems. Results Experimental results indicate that, compared to traditional models, the "request-response" based data integration method significantly reduces the 24-hour communication volume. In individual data integration experiments, the 24-hour communication volume was reduced considerably from 3456000 bytes in the original model to 3696 bytes (per hour request) and 154 bytes (per day request). For 10-item data integration, the 24-hour communication volume was reduced from 11232000 bytes in the original model to 17952 bytes and 748 bytes. Additionally, this method effectively reduces the frequency of data transmission while maintaining data utilization efficiency, significantly improving data processing efficiency and accuracy. ConclusionsThis study demonstrates the efficiency and practicality of the distributed information integration method based on the "request-response" model in unstable maritime network environments. It provides a new technical approach for ship operation and maintenance data integration and offers valuable insights for research in related fields.
Apr. 28, 2025Vol. 20 Issue 2 131 (2025)
Zhendong ZHANG, Cong GUAN, Zehui ZHANG, Chao WU, and Xuewen DING
ObjectivesThe standardization of ship engine room operations is a critical component of ship safety management. Therefore, the practical examination for crew members includes the disassembly and assembly of ship equipment as a key assessment item. To enhance the digitalization and intelligence of crew practical examinations, a computer vision-based automated recognition method for assessing the standardization of ship equipment disassembly and assembly processes is proposed. MethodsFirst, the backbone network of the ship equipment detection model is constructed using YOLOv8n, and the shuffle-attention (SA) mechanism is introduced to improve the model's feature extraction capability and training efficiency. Subsequently, a reparameterized generalized feature pyramid network (GFPN) fusion structure is incorporated into the neck network to enhance the model's ability to fuse multi-scale features. Finally, the original CIoU loss function is replaced with the wise intersection over union (WIoU) loss function to improve the model's accuracy. ResultsExperimental results on a self-constructed dataset demonstrate that, compared to YOLOv8n, the improved object detection algorithm achieves a 0.15 increase in mean average precision and a 0.6 frames-per-second improvement in real-time detection, enabling accurate recognition of the disassembly and assembly processes of gear pumps. ConclusionThe improved algorithm exhibits superior recognition capabilities and is better suited for identifying the standardization of ship equipment disassembly and assembly processes.
Apr. 28, 2025Vol. 20 Issue 2 140 (2025)
Lei AO, Zhizhong SHI, Lei ZHANG, Ziqi DING, Zhiyong PEI, and Weiguo WU
ObjectivesIn modern naval warfare, advancements in weaponry have significantly increased the vulnerability of ships to explosion impacts. Precision-guided weapons, in particular, pose a significant threat, as internal explosions within ship cabins can cause extensive damage to thin-walled structures. This damage not only compromises the ship's structural integrity but also affects its overall functionality and safety. To accurately assess a ship's ability to withstand such damage and make informed battlefield decisions, it is crucial to evaluate the residual load-bearing capacity of damaged structures under complex sea conditions. This analysis is essential for evaluating the ship's damage tolerance and determining its ability to safely return to port. MethodsThis study focuses on the behavior of hull plates damaged by in-cabin explosions. A series of meticulously designed model tests were conducted, aiming to analyze the residual load-bearing capacity of thin plates exhibiting dent damage under biaxial compression. The use of biaxial compression is highly relevant, as it replicates the complex stress states experienced by ship hulls in actual sea conditions. To measure the detailed mechanical behavior of the damaged plates, the digital image correlation (DIC) method was employed. This advanced technique enabled the creation of a three-dimensional full-field strain measurement system, which recorded the out-of-plane deformation of the plates with high precision. By analyzing this data, the study explored the failure modes of dent-damaged thin plates under biaxial compression, illuminating the mechanisms through which such damage progresses and ultimately leads to structural failure. ResultsThe experimental results provided significant insights into the behavior of damaged thin plates under biaxial compression. A key finding was that, regardless of the applied loading ratio, the presence of dent damage led to a substantial reduction in the residual load-bearing capacity of the thin plates. In some cases, this reduction reached up to 19.96%, demonstrating the severe impact of even minor damage on the structural performance of the plates. Furthermore, all tested plates ultimately failed due to significant plastic deformation at the intersection of the loading edges, which underscores the localized nature of the damage and its catastrophic consequences for structural integrity. Another key finding was that an increase in the load at one end of the biaxial compression resulted in a notable decline in the ultimate bearing capacity at the other end. ConclusionsThis study provides valuable insights into assessing the damage survivability of ships under complex stress conditions. The findings help naval personnel better understand the structural state of damaged ships, enabling them to make informed decisions regarding mission continuation or safe return to port. Additionally, the research provides a basis for future research focused on optimizing ship structural design and enhancing damage-tolerance capabilities. Overall, this study plays a vital role in ensuring the safety and operational effectiveness of ships in combat and their safe return to port.
Apr. 28, 2025Vol. 20 Issue 2 245 (2025)
Zemin CHEN, Huwei CUI, Qiyin DING, and Runwen Hu
ObjectiveTo accurately assess the ultimate strength of a hull girder, this study analyzes the elastic shakedown characteristics of hull stiffeners under cyclic loading. MethodsBased on the results of nonlinear finite element numerical simulation, the average stress-average strain relationship of the stiffened plate element in Rahman's Beam-Column Method is corrected with full consideration of the elastic shakedown state, type of stiffened plate, and failure mode. A correction method applicable to the average stress-average strain relationship of the stiffened plate in the elastic shakedown limit state is proposed, and a program for Smith’s method for the ultimate strength of hull girders based on the elastic shakedown limit state is compiled and compared with the results of nonlinear finite element numerical simulation. ResultThe results show that the proposed method can effectively evaluate the ultimate strength of a hull girder in the elastic shakedown limit state with greater efficiency than the nonlinear finite element method. ConclusionThe application of Smith’s method for the ultimate strength of hull girders based on the elastic shakedown limit state can contribute to the accurate and efficient evaluation of the ultimate strength of hull girders.
Apr. 28, 2025Vol. 20 Issue 2 256 (2025)
Pei XU, Longhui LI, and Chao WANG
ObjectiveIn the ice-propeller milling or collision test, in order to accurately test the ice load of the propeller, it is very important to use model ice which satisfies similarity with the geometric and mechanical properties of real ice.MethodsUniaxial compression tests of model ice using different materials are carried out with freshwater ice, saltwater ice, urea ice, ethylene glycol/aliphatic detergent/sugar (EG/AD/S) ice and paraffin model ice as the research objects. The compressive strength and failure modes of ice under different strain rates, freezing and tempering conditions are then tested and analyzed. ResultsIn its development process, saltwater ice made with a freezing temperature and time of -20℃ and 48 h, and tempering temperature and time of -5℃ and 24 h, can meet the requirements of the ice-propeller contact test. The order of the compressive strength of the model ice in descending order is urea ice, freshwater ice, EG/AD/S ice, paraffin model ice, freshwater ice-tempering, EG/AD/S ice-tempering, saltwater ice, urea ice-tempering and saltwater-tempering.ConclusionThe results of this study can provide useful references for the selection of model ice in subsequent ice-propeller milling or collision experiments.
Apr. 28, 2025Vol. 20 Issue 2 266 (2025)
Guangyu GUO, Jinju CUI, and Deyu WANG
ObjectiveThis study analyzes the influence of lateral loads on the ultimate strength and collapse modes of stiffened panels subjected to combined loads. MethodsNonlinear finite element software ABAQUS is used to set up numerical models and perform numerical simulations under combined loads on different models. The out-of-plane displacement fields are captured and decomposed with buckling modes. The modal amplitude-axial load curves of different models are obtained, and the deformation process of stiffened panels is quantified. The deformation behaviors and collapse modes of stiffened panels in different load cases are then analyzed in combination with cloud diagrams. ResultsThe results show that the lateral load in combined load cases causes the yielding of the stiffeners at the endings before the ultimate state, resulting in the increase of the overall buckling mode's amplitude. As the lateral load increases, the overall buckling of the stiffened panels becomes the dominant collapse mode under combined load cases. ConclusionThe findings of this study reveal the relationship between local and global buckling mode amplitudes and collapse modes during the deformation process of stiffened panels, and can provide useful references for the design of ship frame structures.
Apr. 28, 2025Vol. 20 Issue 2 283 (2025)
Jiangchao WANG, Shizhong DU, Xiangfei CHEN, Yexing NIU, Yang YANG, Hongquan ZHAO, and Lei WU
ObjectiveIn order to effectively control flame cutting precision of thin plate with high tensile strength steel, Generation mechanism of out-of-plane buckling distortion and in-plane bending distortion were investigated, and processing with dynamic heating was proposed to reduce flame cutting distortion. Method Using Q550 plate with thickness of 3 mm as research object, out-of-plane buckling and in-plane bending distortion of examined cutting specimen were observed by means of flame cutting experiment and 3-dimensional measurement. By thermal elastic plastic FE computation with large deformation, thermomechanical response during flame cutting of Q550 thin plate was examined, and influence of additional heating on flame cutting distortion of thin plate with high tensile strength steel was also considered. ResultsBoth distortion tendency and magnitude of predicted results are in excellent agreement with measured data. In addition, heating the region away from flame cutting can reduce buckling distortion about 90% and in-plane bending distortion by 40%. ConclusionsBased on the generation mechanism of cutting distortion, assisted flame heating with different processing was proposed and applied to improve the cutting accuracy with flame; furthermore, with thermal elastic plastic FE computation, optimal processing to reduce flame cutting distortion was proposed for high-precision fabrication of thin plate with high tensile strength steel.
Apr. 28, 2025Vol. 20 Issue 2 299 (2025)
Xingxing WU, Jianhu LIU, Jun WANG, Haikun WANG, and Lunping ZHANG
ObjectiveThis research aims to investigate the internal load characteristics of damaged cabins under near-field underwater explosion.MethodLoadings including high-speed fragment velocity of damaged outer plates, quasi-static pressure loads caused by detonation products, and water jetting loads resulting from bubble instability were explored by combining numerical simulation and theoretical methods, which basesd on large-scale cabin segment model experiment subject to near-field underwater explosions. ResultsThe results indicate that the secondary high-speed fragment loads generated from outer plates in near-field underwater explosions still resist high speed, which could cause huge damage to internal cabin structures and equipment. A thoery method based on the modified Taylor flat plate theory was proposed to predict the velocity of high-speed fragments. A quasi-static pressure loading generated by exiting detonation products could result in overall large deformation and tearing at cabin boundary.For the first time, it was discovered that the damaged cabin could suffer secondary damage from high-speed water jets, and the formation of high-speed water jets mainly attributed to three factors: strong shock wave propagation, detonation product expansion, and residual bubble contraction instability.ConclusionThis study provides a significant basis for the assessment of internal cabin loads under near-field underwater explosions.
Apr. 28, 2025Vol. 20 Issue 2 308 (2025)
Shiqiang LI, Shiyang ZHU, Weiping HE, Jun LIU, and Yuansheng CHENG
ObjectiveIn order to explore the characteristics of optimization design schemes of titanium alloy double layer stiffened cylindrical shell structures under different length-to-diameter ratios and calculation pressures, a mathematical model for the lightweight optimization of such structures is established.MethodThe main control program of the genetic algorithm is established in MATLAB, and the ultimate bearing capacity is calculated and checked by finite element software ANSYS. The differences of optimization schemes between titanium alloy single layer stiffened cylindrical shells and titanium alloy double layer stiffened cylindrical shells under different length-to-diameter ratios and different calculation pressures are then compared and analyzed. ResultsThere are two critical calculation pressures in the optimization design of titanium alloy stiffened cylindrical shells, and the optimization design is divided into three types: the stability constraint type of ultimate bearing capacity constraint control optimization design, the strength constraint type of strength constraint control optimization design, and the joint constraint type of strength and ultimate bearing capacity constraint joint control optimization design. The larger the length-to-diameter ratio, the greater the critical calculation pressure. Under the same calculation pressure and length-to-diameter ratio, the weight of the double layer shell optimization scheme is lighter than that of the single layer shell, and the critical calculation pressure of the double layer shell optimization design is smaller than that of the single layer shell under the same length-to-diameter ratio.ConclusionThe results of this study can provide useful references for the optimization design of titanium alloy double layer stiffened cylindrical shell structures.
Apr. 28, 2025Vol. 20 Issue 2 317 (2025)
Er ZHANG, Shaosong MIN, Lin HUA, Cong LIU, and Guotao Chen
ObjectiveIn order to analyze the bending characteristics of a hyperbolic rotating thin shell, the complex two-dimensional mechanical problem is simplified into a one-dimensional bending problem based on Euler's Bernoulli beam theory. MethodBy analyzing the force and deformation characteristics of shells and belt beams, a structural mechanical model is established, and a double curvature rotating thin shell bending differential equation is obtained by combining the physical equation of plate and shell theory with the bending differential equation of a single-span beam. An empirical formula for typical stress is proposed and its accuracy verified by an ANSYS-based simulation. ResultsThe results show that the error between the simulation and the formula is about 2.3%, which demonstrates the high accuracy of the formula in predicting typical stress and verifies the correctness of the theoretical calculation method. ConclusionThe proposed method can provide useful references for the design and optimization of similar structure.
Apr. 28, 2025Vol. 20 Issue 2 329 (2025)
Cheng YANG, Hongxiao LIU, Ying WANG, and Jingli YANG
Objective Aiming at the problem that the task reliability of autonomous intelligent systems is difficult to evaluate accurately due to such characteristics as the decoupling of components, changing systems, and complex fault propagation laws, this paper proposes a multi-agent-based task reliability evaluation method for autonomous intelligent systems. MethodsBy constructing a reliability simulation framework based on a double-layer network structure, the separation expression and coupling correlation of the autonomous intelligent system's information propagation process and fault propagation process are realized. By designing the attributes, behaviors, and interfaces of various components in the autonomous intelligent system, a universal fault propagation and state switching mechanism is built. Based on an analysis of the factors affecting the task reliability of the autonomous intelligent system, a multi-stage task success criterion is established. Finally, based on the Anylogic simulation platform, a task reliability evaluation model for autonomous intelligent systems is developed which is capable of single process simulation and multiple Monte Carlo simulation. ResultsThe simulation results show that the proposed method can quantitatively evaluate the reliability of the typical tasks of intelligent autonomous systems, as well as exploring the key fault factors affecting such reliability. ConclusionThe proposed method can support the quantitative evaluation of the task reliability of intelligent autonomous systems and the improvement of their design.
Apr. 28, 2025Vol. 20 Issue 2 335 (2025)
Yuanxin HUANG, Li’an BIAN, Gaosheng LI, Yanxiu LI, Ranhao CHEN, and Yan WANG
Objectives To meet the demand for multifunctional antennas in shipborne communication systems, this paper proposes a novel high gain four-beam reconfigurable patch antenna based on the Yagi antenna. Methods The proposed antenna is composed of four symmetrical sector elements, with four PIN diodes loaded between the central patch and the sector components. These PIN diodes are used to control the radiation pattern by switching their on/off states, allowing the antenna to achieve four distinct directional patterns. Additionally, arc-shaped parasitic units are incorporated as reflectors or directors to enhance the antenna's gain and suppress sidelobes. The antenna is fabricated on a single-layer PTFE substrate with a dielectric constant of 2.2 and a loss tangent of 0.001, with overall dimensions of 80 mm × 80 mm × 4 mm. The design process involved optimizing various parameters, such as the radius of the sector patches (R1) and the spacing between the parasitic units and the sector patches (D1), to achieve the desired performance. The antenna's performance was evaluated through both simulation and experimental testing, with detailed analysis of its radiation patterns, gain, and impedance characteristics. Results Experimental results demonstrate that the antenna can achieve beam pointing at four specific azimuth angles (45°, 135°, 225°, and 315°) across four operating modes. Within the frequency range of 5.47 to 6.05 GHz, the antenna exhibits a high average gain of 7.46 dBi, with a measured impedance bandwidth of 10.07%. The measured gain is consistent across all four modes, with a maximum gain of 8.68 dBi observed within the operating band. The introduction of parasitic elements significantly enhances the antenna's directional radiation pattern, reducing sidelobes and improving gain. The optimized antenna demonstrates excellent impedance matching and radiation characteristics, with the measured results closely matching the simulated performance. Conclusions The proposed antenna has the advantages of high gain, low profile and simple control. Its radiation direction can be dynamically adjusted according to the communication needs of ships in order to reduce signal interference and improve communication quality.
Apr. 28, 2025Vol. 20 Issue 2 350 (2025)
Yongxin XIAO, Xianbo XIANG, Dian KONG, Lichun YANG, and Shaolong YANG
ObjectiveAiming at the problem of accurate real-time pose acquisition in the autonomous recovery of an unmanned surface vehicle (USV), a STag marking visual guidance method for unmanned vehicle docking and recovery is proposed.Methods Due to the stable attitude characteristics of STag markers, they are selected as the fiducial markers in the visual guidance of this work. By detecting STag markers in the video stream obtained by the camera on the USV, combined with the camera's internal parameters and the size of the markers, EPnP and direct linear transformation (DLT) algorithms are fused to calculate the relative pose of the recovery device and USV. Amplitude limiting filtering and first-order low-pass filtering are then performed to obtain the required lateral offset and heading deviation for line-of-sight (LOS) docking guidance.ResultsIn the static performance test, the average angular error of target detection is 6.85° and the average distance error is 0.056 m. In the guided autonomous recovery lake test, the accuracy of static and dynamic docking is within plus or minus 0.5 m.ConclusionCompared to traditional USV docking and recovery methods, STag marking visual guidance can enhance the terminal accuracy of USV autonomous docking and improve the overall success rate of docking and recovery.
Apr. 28, 2025Vol. 20 Issue 2 357 (2025)
Yu ZHOU, Liang HUANG, Chunhui ZHOU, Yuanqiao WEN, Yamin HUANG, and Jiaci WANG
ObjectiveTo address the issues of low efficiency and inaccurate ship behavior recognition when handling large-scale ship trajectory data, this paper proposes a method for recognizing and classifying ship behaviour based on trajectory feature image modelling and deep learning.MethodA visual coding model is constructed for the salient features, including speed, acceleration, heading, steering rate, and trajectory point density. It also realizes the sample generation and enhancement processing of ship trajectory feature images while taking into account the multi-scale features of ship trajectory. ResultsBased on the trajectory feature images, the deep learning model significantly improves the quality and accuracy of ship behavior recognition, with a recall rate of 90.99%, precision rate of 91.23%, and F1 score of 91.11%, which translates to an accuracy rate of 91.22%.The experimental results indicate that the speed, steering rate, and trajectory point density are the best feature combinations for distinguishing the eight behaviors, such as straight ahead, steering, maneuvering, berthing, and anchoring. ConclusionsThe proposed approach can successfully detect ship behaviors at various trajectory data scales, perform automatic ship behavior categorization and identification, and produce outcomes that may assist in decision-making for intelligent water traffic control.
Apr. 28, 2025Vol. 20 Issue 2 366 (2025)
© Copyright 2018-2021 | Chinese Laser Press.
All Rights Reserved 沪ICP备15018463号-20