





Please enter the answer below before you can view the full text.


2025
Volume: 20 Issue 4
32 Article(s)
Guanhui ZHAO, Xiang XIA, and Tianyi WEI
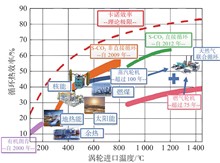
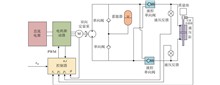
The supercritical carbon dioxide (S-CO2) power generation system uses S-CO2 as the working medium and is based on a closed-loop Brayton cycle using real gas. It converts heat released from a heat source into electrical energy through direct or indirect means, and has the advantages of high power density and high cycle efficiency, enabling it to better meet the needs of future naval power development. This article introduces the technical characteristics of the S-CO2 power generation system and summarizes its development history over the past 60 years. For the overall design and power system applications of naval vessels, seven key system design technologies are proposed, covering aspects such as overall design, coordination and matching, operation control, electromagnetic compatibility, vibration and noise reduction, working medium control, safety, and reliability. Based on the methodology of systems engineering, design ideas supporting the design of the S-CO2 power generation system for ships are reviewed.
Aug. 30, 2025Vol. 20 Issue 4 204 (2025)
Kaiwei YU, Zirui LI, Chong CHEN, Jun WU, and Haiping ZHU
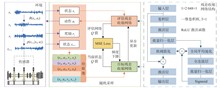
ObjectivesAiming at problems including the fact that the fault diagnosis model of propulsion shafting systems under variable working conditions has poor generalization and cannot learn autonomously, and that the performance of the model is relatively fixed and cannot be updated online after it is deployed to the edge, this paper proposes a cloud-edge-end collaborative fault diagnosis method based on a deep residual shrinkage adaptive network. MethodsFirst, the historical data of known operating conditions is collected and a deep residual shrinkage adaptive network model is built in the cloud through which reinforcement learning algorithms are introduced. These give the model the ability to update adaptively and learn data online under changing working conditions, thereby realizing online updating and adaptive performance enhancement. Model deployment and updating at the edge end are then realized by model slice distribution and edge slice aggregation, and real-time fault diagnosis is performed at the edge. Finally, the effectiveness of the proposed method is verified using a ship propulsion shaft system experimental bench. ResultsThe results show that the proposed method is able to realize the online updating of the model under variable operating conditions, and the updated model has higher fault diagnosis accuracy compared with a non-updated model. ConclusionThe results of this study can provide useful references for the fault diagnosis of propulsion shaft systems under variable operating conditions.
Aug. 30, 2025Vol. 20 Issue 4 213 (2025)
Ning WANG, Bingsong SONG, and Tianyu GAO
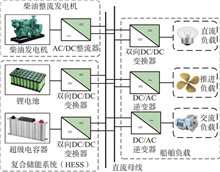
ObjectiveIn view of the effects of life decay on fuel cell efficiency and power system performance, an adaptive equivalent hydrogen consumption minimization strategy is proposed that considers the life decay of fuel cells. MethodsBased on the relationship between fuel cell efficiency and degradation rate, a fuel cell degradation factor is introduced to design an energy management objective function that considers efficiency degradation. The influence factors of fuel cell degradation are then analyzed, and a power distribution optimization system that considers both economy and durability is constructed. Finally, the optimization performance of the proposed strategy in the whole life cycle of the fuel cell is verified by comparison experiments under three typical scenarios: slight degradation, semi-degradation and severe degradation.ResultsCompared with the original strategy, the proposed strategy can reduce fuel cell degradation by up to 12.4% and ship voyage cost by 4.97% during the whole life cycle of the fuel cell.ConclusionThis method can effectively improve the economy and durability of marine hybrid power systems.
Aug. 30, 2025Vol. 20 Issue 4 222 (2025)
Shuiqing KE, Xiangguo YANG, Xin LI, Yufan WANG, Quanzheng DUAN, and Telu TANG
ObjectiveFocusing on the development of shipboard hybrid energy storage systems ( HESSs) planning and operation strategy design under complex working conditions, a multi-objective co-optimization method with higher adaptability to working conditions is proposed. MethodFirst, priority is given to smoothing power fluctuations in the genset, and the total power output of HESS is determined using model predictive control (MPC). Then, the interplay between HESS capacity configuration and theenergy management strategy (EMS) is taken into account, incorporating an adaptive power allocation mechanism proposed in this paper, the Harris hawk optimization (HHO) algorithm is employed to solve the optimization model, with the goal of minimizing investment cost and battery degradation cost. ResultsThese results demonstrate that the co-optimization method based on MPC-HHO can effectively reduce the power fluctuation of the genset, the average power fluctuation rate after optimization is reduced by 73.24% compared to before optimization. Meanwhile, compared with the single-layer optimization, the co-optimization method can effectively reduce the investment cost and battery degradation cost. ConclusionAdding a HESS to the ship electric power system can effectively improve the stability of the power grid. The research can provide reference for planning and designing operation strategy of shipboard HESSs.
Aug. 30, 2025Vol. 20 Issue 4 233 (2025)
Weibo LI, Hao ZHANG, Chenghu XU, Maojie ZHANG, and Hualiang FANG
ObjectiveThis paper proposes using the Spider Wasp Optimization (SWO) algorithm to achieve precise position control of an electro-hydrostatic actuator (EHA) while reducing the parameter tuning difficulty of the EHA sliding mode controller and improving its comprehensive performance. MethodsA simplified model of an EHA is established and its sliding mode controller is designed. The sliding mode surface and reaching rate parameters of the controller are then adjusted by the SWO algorithm, and Matlab/Simulink and AMEsim simulation software is used to build a co-simulation model for verification.ResultsThe parameters of the sliding mode controller are adjusted manually and by the SWO algorithm respectively. The comparative simulation results show that the sliding mode controller optimized by the SWO algorithm avoids overshoot and has enhanced anti-interference properties, and its convergence speed is improved by 33.6%, proving the feasibility of optimizing the sliding surface and reaching rate parameters of an EHA sliding mode controller using the SWO algorithm.ConclusionThe results of this study can provide theoretical references for the design of EHA sliding mode controllers.
Aug. 30, 2025Vol. 20 Issue 4 246 (2025)
Luotao XIE, Yuang SHI, Jingtao WANG, Ziyi ZOU, Zhifang FEI, Guobing CHEN, and Lei ZHANG
ObjectiveTo address the operational instability, vibration, and abnormal noise in a specific steam turbine unit, this study proposes a method for modifying the internal flow characteristics of the control valve through an internally-cut valve core structure.MethodInitially, a full-scale high-precision modeling method was employed to establish the complete geometry of the flow passage of the control valve. Subsequently, two types of internally-cut valve cores were designed based on principles of supersonic expansion suppression. A multi-scale hybrid mesh strategy incorporating various boundary layer types was implemented, with convergence accelerated through iterative computations. ResultsExperimental validation showed a discrepancy of less than 5% between test measurements and simulation results for key parameters across various valve core configurations, confirming the accuracy and reliability of the numerical method. The optimized steam flow characteristics in both the throttling region and the valve core bottom area of the novel design effectively reduce energy losses and vibration noise caused by asymmetric flow patterns. Furthermore, the innovative structure reduces hydrodynamic forces on the valve core base by 20%–30%, significantly suppressing broadband flow-induced vibrations in both the control valve and the turbine unit.ConclusionThe valve core configuration has a significant impact on flow field characteristics. The internally-cut valve core design proposed in this study provides valuable insights for optimizing flow field distribution and offers technical guidance for improving the performance of similar steam turbine control systems.
Aug. 30, 2025Vol. 20 Issue 4 254 (2025)
Zhihao LI, Zaopeng DONG, Wei LIU, Jinliang SHENG, and Pengbo SUN
ObjectiveIn order to achieve the cooperative formation control of underactuated autonomous underwater vehicle (AUVs) with external environmental disturbances and model uncertainties, a bio-inspired terminal sliding mode control method is proposed. MethodsFirstly, the bow angle of the leader AUV is smoothed by differential tracker and the desired trajectory for the follower AUVs are generated based on the leader–follower formation control strategy. Then, the virtual control laws of the velocity are designed in a backstepping approach and the AUVs' position errors are stabilized. At the same time, aiming at smoothing the virtual control law, alleviating the system oscillation and reducing the computational complexity of the controller, a bio-inspired model is designed. In addition, a fixed-time nonsingular terminal sliding mode is proposed for convergence faster. Finally, a radial basis function neural network (RBFNN) with minimal learning parameter (MLP) is adopted for approximating the environmental disturbances and model uncertainties. ResultsCompared with integral sliding mode control, the proposed control method can enable the AUV formation system to track the desired trajectory faster and more accurately. ConclusionThe designed formation control algorithm can achieve the trajectory tracking of AUVs.
Aug. 30, 2025Vol. 20 Issue 4 262 (2025)
Baisong LU, Jian WANG, Bo ZHANG, Bing ZHAO, Zhiyuan HAO, and Hong YI
ObjectiveThe safety of towing large ships to designated sea areas is of great significance for maritime navigation. However, traditional towing operations, which rely on manual scheduling, face challenges in complex marine environments. The towing system is characterized by non-linearity, large inertia, and under-actuation, making it vulnerable to external disturbances. This research aims to enhance the disturbance rejection performance of underactuated autonomous tugboats during large ship towing, aiming to ensure the safe navigation of the towing system along the planned path. MethodsFirstly, a three-degree-of-freedom coupled motion mathematical model of the towing system is established based on the ship MMG model, taking into account the surge, sway, and yaw motions of the ships in the horizontal plane. This model comprehensively considers the external disturbances and towing forces acting on the towed ship and the tugboat, providing a solid foundation for the design of subsequent control strategies. Secondly, a towed line-of-sight (TLOS) guidance method suitable for towing navigation is proposed. This method calculates the desired heading of the towed ship based on the target path deviation, the position, and heading of the towed ship. It converts the path-tracking problem into speed and heading control problems, thereby simplifying the control process. Then, a hierarchical anti-disturbance control strategy (HAD-CS) is designed. In the control layer of the towed ship, a top-level anti-disturbance control method combining linear active disturbance rejection control (LADRC) and sliding mode control (SMC) is designed. LADRC is used to control the heading of the towed ship by calculating the desired tow-cable angle based on the heading deviation and compensating for the heading disturbance. SMC based on the extended state observer (ESO-SMC) is used to control the longitudinal speed by observing and compensating for external disturbances, outputting the required longitudinal force. The output of the top-level control, which includes the desired tow-cable angle and force, is then transmitted to the bottom-level tugboat controller.In the control layer of the tugboat, a bottom-level anti-disturbance control method based on ESO-SMC is designed. The output of the top-level anti-disturbance control is used as the input to the bottom-level control. Considering the constraints of the tow-cable and thrusters, the method designs separate heading and speed controllers for the tugboat. For heading control, a sliding-mode surface is designed based on the heading error, and the control law is derived by estimating the disturbance. For speed control, a sliding-mode surface is designed based on the speed error, and the control law is derived by estimating the longitudinal disturbance. ResultsSimulation experiments are carried out to compare the proposed HAD-CS with the existing single-level anti-disturbance control strategy (SAD-CS). The results show that both control strategies can follow the reference path. However, the HAD-CS shows better performance. In terms of path-tracking performance, the average lateral error of the towed ship under the HAD-CS is 1.448 m, while under the SAD-CS it is 1.743 m. The path-keeping performance of the towed ship under the HAD-CS improves by about 16.9% compared with the SAD-CS. In the presence of sudden constant disturbances, the HAD-CS ensures that the towed ship remains on the desired path, whereas the SAD-CS cannot. In terms of heading-keeping performance, during turns and in the presence of sudden disturbances, the HAD-CS enables the heading angles of the towed ship and the tugboat to converge to the target heading more quickly, with smaller overshoots. The average heading error of the towed ship decreases by 34.6%, and that of the tugboat decreases by 51.9%. In terms of speed-keeping performance, under the SAD-CS, the speeds of the two-ship towing system fluctuate greatly, especially during turns and in the presence of sudden disturbances. In contrast, under the HAD-CS, the speed error of the tugboat decreases by 52.2%, and that of the towed ship decreases by 68%. The ships can quickly converge to the predetermined speed with smaller fluctuations. ConclusionsThe proposed HAD-CS can effectively compensate for the disturbances acting on the towed ship and the tugboat due to external environmental factors. It significantly improves the anti-disturbance ability of the towing system, verifying the feasibility of autonomous tugboats towing large ships. This research provides a theoretical reference for the application of autonomous towing by tugboats. Future research can focus on developing a more accurate tow-cable model, fully considering the impact of tow-cable motion on the system and external environmental disturbances, and introducing neural network methods to estimate disturbances to further enhance the anti-disturbance performance of the hierarchical anti-disturbance control strategy.
Aug. 30, 2025Vol. 20 Issue 4 272 (2025)
Yang SONG, and Pingjian MING
ObjectiveThis study aims to investigate the similarity laws of submarine flow-induced noise with a view to enhancing the assessment accuracy of submarine stealth performance. MethodsA flow field simulation of the SUBOFF submarine model is conducted using the incompressible SIMPLEC algorithm in conjunction with the k–ε turbulence model. The flow-induced noise is calculated via the Kirchhoff-Ffowcs and Williams-Hawkings (K-FWH) acoustic model. The impact of these factors on the similarity characteristics of submarine flow-induced noise is comprehensively analyzed by considering them, such as appendages, Mach number, Reynolds number (indicating model scale), and radius of acoustic monitoring points. The similarity laws of flow-induced noise are summarized with corresponding expressions established. ResultsThe results show that the appendages have a limited impact on the similarity laws, and the frequency of submarine flow-induced noise follows the Helmholtz number similarity law. In the mid-to-low frequency range, the sound pressure level (SPL) similarity law is closely correlated with the sixth power of the Mach number and the square of the model scale. However, in the high-frequency range, due to intensified scale effects, the SPL similarity law deviates slightly. ConclusionThe findings of this study provide a solid theoretical foundation and technical support for the prediction, assessment, and stealth design of submarine flow-induced noise. Future work can further refine the models to improve prediction accuracy.
Aug. 30, 2025Vol. 20 Issue 4 43 (2025)
Shujian LÜ, Chengzao HAN, Rui YANG, and Weiguo HUANG
ObjectiveCavitation, as one of the most important noise sources around propellers, significantly enhances far-field radiated noise and brings many adverse effects. To effectively suppress propeller cavitation noise, it is necessary to carry out research on its noise characteristics and sound generation mechanism. MethodIn this study, the cavitation noise around a PPTC (Potsdam Propeller Test Case) propeller is simulated using a large eddy simulation (LES) combined with the permeable Ffowcs Williams and Hawkings (PFW-H) equation, focusing on the effect of cavitation on the spectral characteristics of far-field noise and the cavitation noise generation mechanism. ResultsThe predicted hydrodynamic results agree well with the experimental data. It is found that there is a significant periodicity in the evolution of both the sheet cavity (SC) and tip vortex cavity (TVC) around the propeller, thus both contribute high intensity dominant frequency noise. SC evolves with incipient and collapsing processes which are accompanied by transient cavity volume variations, leading to an intensification of high-frequency broadband noise. TVC evolves with a volume rebound behavior which induces high-intensity continuous acoustic pressure pulsations and thus induces significant noise peaks at frequencies above the dominant frequency. ConclusionThis paper provides a theoretical basis for the proposal and implementation of propeller cavitation noise control strategies in engineering.
Aug. 30, 2025Vol. 20 Issue 4 57 (2025)
Huiyao LI, Jingyi HE, wei ZHAO, Zhiqiang RAO, Zhenguo ZHANG, and Hongxing HUA
ObjectiveThis study aims to investigate the effects of dynamic variations in rotor tip-clearance on the unsteady forces of a pump-jet propulsor, while analyzing the role of a flexible isolation system in influencing the excitation characteristics of the propulsion system. The findings contribute to optimizing propulsion system design and enhancing submarine stealth performance. MethodsAn overset grid technique is applied to construct a numerical model of the SUBOFF submarine with a pump-jet propulsor, coupled with the SST k-ω turbulence model for simulations. Numerical calculations are performed for operating conditions where the rotor's vertical vibration frequency approaches the rotor blade passing frequency. Frequency spectrum analysis is conducted to assess the effects of dynamic tip-clearance variations on fluctuating pressure and excitation forces. ResultsThe results indicate that dynamic tip-clearance variations significantly affect the three-directional (x, y, z) excitation forces of the rotor and duct, with the vertical excitation force showing the highest amplitude, followed by the lateral and axial forces. Moreover, pulsating pressure on the rotor surface peaks at new branch frequencies, particularly at RF (rotor vibration frequency) and BPF (blade passing frequency). The lateral and vertical excitation forces of the duct are more strongly influenced by tip-clearance variations than those of the rotor. ConclusionsThe dynamic changes in rotor tip-clearance induced by the flexible isolation system significantly affect the unsteady force characteristics of the pump-jet propulsor. The findings provide valuable guidance for enhancing the compatibility between the flexible isolation system and the pump-jet propulsor, thus contributing to submarine noise reduction and improved stealth performance.
Aug. 30, 2025Vol. 20 Issue 4 70 (2025)
Wei CHAI, Jiaxing ZHANG, Peiyuan FENG, Xiaonan YANG, Jun WU, and Jianzhang QI
Objectives Ships may encounter accidents such as collisions, groundings, and reef impacts during navigation, which can lead to hull damage and flooding, thereby significantly reducing buoyancy and stability. Under wind and wave conditions, a damaged ship's resistance to sinking is a crucial to its survivability assessment. Traditional methods evaluate the dynamic stability of ships in wind and waves by analyzing resonance angles to quantify wave effects. These methods are limited in their ability to assess the survivability and resistance to sinking of damaged ships under real-world conditions. Therefore, this study aims to develop a more comprehensive and accurate method for evaluating the dynamic stability of damaged ships under wind and wave conditions, providing a reliable reference for enhancing their survivability and safety.MethodsFirstly, the DTMB 5415 standard ship model was selected as the test case, and its static stability parameters were calculated under typical damage conditions. Then, a single-degree-of-freedom roll motion equation for the damaged ship under the combined action of wind and waves was constructed. The CFD method was used to obtain the roll damping coefficient, which is of great significance for accurately calculating the roll motion response. Subsequently, a numerical method was employed to calculate the roll motion response of the damaged ship under wind and wave conditions. Finally, the Monte Carlo method and the Gumbel method were combined. ResultsThe results show that the proposed method takes into account the effects of wave parameters such as significant wave height and wave period on the dynamic stability of damaged ships. It was found that the wave period has a significant impact on the extreme roll motion response distribution. When the wave period approaches the natural roll period of the damaged ship, the roll motion response reaches its peak. In contrast, traditional methods based on the limiting dynamic heel angle fail to fully consider this factor. Calculations and comparisons reveal that the limiting dynamic heel angles under various wind and wave conditions are considerably greater than the extreme roll motion responses of damaged ships. This indicates that traditional methods may lead to conservative calculation results and underestimate the ability of damaged ships to withstand sudden wind-induced heeling. ConclusionsThe study shows that the extreme roll motion response of damaged ships under the combined action of wind and waves follows a Gumbel distribution. The Gumbel method can effectively predict this distribution. The proposed dynamic stability assessment method, which incorporates wave parameters, offers a more comprehensive evaluation than traditional methods. It is applicable not only to the dynamic stability assessment of damaged ships but also to that of intact ships, providing an important reference for ship stability assessment, which helps to improve the accuracy of ship stability evaluation and enhance the ship safety in complex sea conditions.
Aug. 30, 2025Vol. 20 Issue 4 80 (2025)
Jialong JIAO, Zhenwei CHEN, Wenhua XU, Caixia JIANG, and Shuai CHEN
ObjectiveWith the continuous development of modern ships with increasing size and speed, and the application of high-strength steel, the problem of ship hydroelastic vibration has become more prominent due to the reduction in hull natural frequencies. Springing and whipping loads significantly contribute to the wave loads of large ships. However, existing research on ship wave loads and hydroelasticity mainly focuses on the symmetric responses of ships sailing in head regular waves. In actual sea conditions, ships encounter waves from various directions. Due to the complexity of analyzing ship asymmetric responses, research on wave loads and hydroelasticity of ships in oblique waves remains limited. It is of great significance to accurately predict the asymmetric wave loads and structural responses of ships under extreme wave conditions. This study aims to develop a hydroelasticity analysis method for ships using two-way CFD-FEM fluid-structure coupling to predict the motions and wave loads of ships in oblique regular waves, accounting for asymmetric loads, structural responses, and nonlinear load effects. This method can provide a new approach for evaluating the hydrodynamic and structural load performance of ships in oblique sea conditions, enhancing the understanding of hydroelastic effects on ships. MethodsThe methodology employed in this research involves several steps. First, a computational domain for oblique regular waves is established using CFD software. The three-dimensional N-S equations are solved within the fluid domain to calculate the nonlinear wave loads on the model-scale ship. The computational domain of the numerical wave tank consists of a background region and an overset region. The Euler Overlay method is used to generate fifth-order Stokes waves. Second, a finite element model integrating the hull beam and the ship hull is developed. The massless hull surface is represented using shell elements, while the backbone beam is modeled with 3D uniform beam elements. The total mass and roll moment of inertia of the ship model are similar to those of the full-scale ship. To ensure the longitudinal weight distribution and roll moment of inertia in the FE model to be consistent with the experimental model, concentrated mass and moment of inertia are added to the reference points in two stages. Finally, a two-way fluid-structure coupling analysis is performed. Both the motions and structural deformations of flexible structure derived from the FEA are fed back to the CFD solver to update the hydrodynamic grid data. The fluid loads on the deformed structure, calculated using CFD with a morphing grid technique, are then applied to the structural FE model for the subsequent FEA. ResultsThe results show that the numerical method is effective, as confirmed by the CFD grid and time step sensitivity analysis and the comparison with free roll decay test results. It can accurately predict the trends and amplitudes of pitch motion, vertical bending moment (VBM), and torsional moment (TM) compared to experimental results. For instance, in the motion response analysis of a ship in oblique waves, the numerical simulation results of heave, pitch, and roll are generally consistent with the experimental results, with a pitch peak error within 8%. In terms of load analysis, the VBM and TM calculated by the numerical method align well with the experimental trends, though there are some differences. Under extreme sea conditions, the high-frequency components caused by slamming primarily contribute to the total bending moments. The wave-frequency horizontal bending moment (HBM) and TM increase linearly with the wave height, while the high-frequency components exhibit significant nonlinear growth. Under typical extreme sea conditions, the HBM at typical sections is comparable to the VBM loads. ConclusionsIn conclusion, the established CFD-FEM method can accurately predict the motion and load responses of ships under asymmetric waves. It provides a novel approach for evaluating the hydrodynamic and structural load performance of ships in oblique sea conditions. The research also reveals the significant impact of hydroelastic effects on VBM, HBM, and TM under severe sea conditions. This study provides valuable insights into ship design and performance evaluation in complex sea environments, promoting the development of ship hydroelasticity research.
Aug. 30, 2025Vol. 20 Issue 4 88 (2025)
Mengjie JIANG, Chaohe CHEN, Lianbin ZHANG, and Lei TAN
ObjectiveManeuverability is one of the most important performance characteristics of a Remotely Operated Vehicle (ROV), and is closely related to its dynamics model. To realize the precise control and maneuverability of an open-frame ROV, a dynamic model applicable to this ROV is established based on its geometrically complex structural characteristics, and the full-angle motion characteristics of the drift and attack angle. MethodA dynamic model applicable to the motion simulation of the ROV is constructed by comprehensively considering the roles of hydrostatic force, hydrodynamic force, control force, and cable force. The CFD method is used to simulate the steady and unsteady motion of the ROV to solve the hydrodynamic parameters, and the multiple linear regression method is used to process the calculated data to obtain the relevant hydrodynamic parameters, and then the dynamics model is optimized by sensitivity analysis. The mathematical model of ROV motion maneuverability is constructed in Matlab, then the rectilinear motion and rotational motions of ROV under positive and negative thrust are simulated. ResultsThe results show that the dynamic model considers the motion demand of the full angle of the horizontal and vertical plane, as well as better reflecting the influence of the asymmetry of the structure on the hydrodynamic performance, which meets the motion simulation demand of this ROV. ConclusionThe results of this study can provide a new idea for the calculation of ROV hydrodynamic characteristics and the research of space modeling on its maneuverability and control algorithm, and provide a strong data guarantee for subsequent ROV operations under special working conditions.
Aug. 30, 2025Vol. 20 Issue 4 99 (2025)
Wo ZHANG, and Tiaojian XU
ObjectivesIn recent years, with the continuous development of offshore engineering into deep-sea waters, remotely operated vehicles (ROVs) have been widely used in various fields such as marine scientific research, marine resource exploration, and subsea engineering due to their advantages of cost-effectiveness, high operational efficiency, and capacity for continuous operation in complex deep-sea environments. However, the complex open-frame structure of ROVs, along with various attached devices, results in a highly complex flow field during motion. To enhance the maneuverability and control precision of ROVs, mitigate the risks of offshore operations, and enhance operational safety, it is necessary to study their hydrodynamic characteristics. This study aims to conduct a systematic investigation into the hydrodynamic characteristics of open-frame ROVs and accurately determine their hydrodynamic coefficients. This research is of great significance for improving the understanding of ROV motion performance, stability, and maneuverability in water, and serve as a foundation for future motion prediction and structural optimization of ROVs. MethodsFirst, the reliability of the STAR-CCM+ numerical simulation results was validated through physical straight navigation model tests of open-frame ROVs. Then, numerical simulations were conducted for the straight, oblique, and planar forced motions of the ROV. In the numerical simulation, the RANS-based CFD software STAR-CCM+ was adopted, and the control equations consisted of the continuity and momentum equations for incompressible fluid, using the Realizable k-ε turbulence model. The ROV model was simplified while retaining its main structural features, and grid-independence and wall-independence verifications were performed. Subsequently, the least-squares fitting method was used to obtain the viscous and inertial hydrodynamic coefficients of the ROV based on the simulation results. ResultsIn the case of straight and oblique motions, the viscous hydrodynamic coefficients Y'vvand Y'u|v|, which are related to the ROV's geometric port-starboard asymmetry, are relatively small, with values of 7.25×10-3 and 2.74×10-2 respectively. In the planar forced motion, the inertial hydrodynamic coefficient $ Z'~~{\dot{v}} $, $ Z'~~{\dot{p}} $ and $ X'~~{\dot{r}} $ attributed to the ROV's port-starboard asymmetry, constitute significant portions of the overall inertial hydrodynamic coefficient matrix, with values of 1.210%, 8.850%, and 3.499% respectively. Also, in the straight navigation, the hydrodynamic forces acting on the ROV in the longitudinal and vertical directions show significant differences in different positive and negative motion directions, whereas the difference in the lateral direction is weak. In the oblique navigation, the longitudinal hydrodynamic force exhibits minimal variation with yaw angle, whereas the lateral and vertical hydrodynamic forces vary significantly with the angle of attack and drift angle. ConclusionsThe port-starboard asymmetry of the ROV's geometry has a non-negligible impact on its inertial hydrodynamic characteristics. The hydrodynamic coefficients obtained from numerical simulations can support subsequent ROV motion prediction and structural optimization. Future research will focus on the impact of the asymmetric structure of the open-frame ROV on its viscous hydrodynamic characteristics. More accurate hydrodynamic calculation models will be developed through turning motion simulations to derive second-order and coupled viscous hydrodynamic coefficients related to angular velocity.
Aug. 30, 2025Vol. 20 Issue 4 111 (2025)
Zhe LI, Jie YANG, Yi ZHANG, Hua WANG, Yafei LI, Ke WANG, and Mingliang XU
ObjectiveThe critical factor in the safe landing of carrier-based aircraft is the successful locking of the tailhook and arresting wires. However, in the existing research, there is relatively little work on using intelligent means to assist the landing signal officer (LSO) in identifying the arrested landing state.MethodThis paper proposes a model for identifying the arrested landing state which integrates coordinate attention (CA) and a weighted bi-directional feature pyramid network (BiFPN). First, CA is used to enhance the network's feature extraction ability in both the spatial and channel dimensions. Next, BiFPN introduces learnable weights to learn the weights of different input features by repeatedly using top-down and bottom-up multi-scale feature fusion. A C2F lightweight model structure is adopted to reduce the parameters and computational complexity. Finally, the proposed model is compared with five baseline models through simulation experiments.ResultsThe results reveal that the proposed model outperforms the baseline model in detecting the tailhook and arresting wires of carrier-based aircraft. ConclusionsThe findings of this study can provide valuable references for improving the accuracy and robustness of the detection of the tailhook and arresting wires of carrier-based aircraft, and is of great significance for improving the efficiency of carrier-based aircraft landing operations and preventing potential personnel injuries and equipment losses.
Aug. 30, 2025Vol. 20 Issue 4 124 (2025)
Qiangjun LUO, Jun LIU, Puyu JIANG, and Yuansheng CHENG
ObjectiveTo enhance the application effectiveness of the decomposition-based optimization method in the large-scale optimization design of ship cabin structures, a constraint progressive relaxation adjustment strategy and a computational resource allocation strategy are proposed that consider both the contribution of the sub-problem to the objective and the margin of constraints of the sub-problem. MethodsConstraint progressive relaxation adjustment strategy: initially, a tightened constraint boundary is given and then gradually relaxed until it recovers to the original constraint boundary, enabling all sub-problems to be more fully optimized. Computational resource allocation strategy: optimization computing resources are comprehensively allocated based on the contribution of the sub-problem to the objective and the margin of constraints of the sub-problem. The two strategies are then combined and their coupling effects analyzed.ResultsCompared with the original algorithm, under the same computational resources, the cabin weight is reduced by 10.3% and 7.0% when using the constraint progressive relaxation adjustment strategy and computational resource allocation strategy respectively, and the weight is reduced by 22.2% when both strategies are applied simultaneously, relative to the weight obtained by the original optimization method. Conclusion The proposed strategies are effective and possess value for the decomposition-based large-scale optimization of ship structures.
Aug. 30, 2025Vol. 20 Issue 4 134 (2025)
Kaiwen TAO, and Bin LIU
ObjectiveThe analysis of small failure probability in the overall longitudinal strength of a ship's hull structure is a complex, high-dimensional and time-consuming task which is challenging to calculate accurately using traditional reliability analysis methods. To address the precise calculation of small failure probabilities in the reliability analysis of complex structures, this paper establishes a computational process for assessing structural small failure probabilities. MethodThe subset simulation method is used to reduce the overall sample demand. Samples within each subset are generated through Markov Chain Monte Carlo (MCMC) sampling to cover all scenarios within the sample space, and precise computations are performed on these samples using the stochastic finite element method (SFEM), resulting in accurate sample response values which enhance the accuracy of the failure probability calculations. Furthermore, the introduction of the dynamic Kriging surrogate model significantly reduces the number of FEM computations within each subset.ResultsThe process is applied to a case study on the reliability analysis of an icebreaker's hull structure, and the analyzed lifecycle structural failure probability is 9.58 × 10-6. ConclusionThe accuracy and efficiency of the proposed method are validated through comparisons with the computational results under various parameter settings.
Aug. 30, 2025Vol. 20 Issue 4 143 (2025)
Xiaoheng ZHANG, Xiangshao KONG, and Weiguo WU
ObjectivesShips are essential for waterborne transportation, and the safety of their structures is of utmost importance. However, during operation, ships may encounter various accidents such as collisions and groundings, which may damage the hull integrity. Such accidents not only pose risks to the safety of the crew and cargo but can also cause significant environmental damage. To ensure ships maintain sufficient safety reserves after damage and avoid catastrophic consequences, accurately evaluating the residual strength of ships in extreme collision scenarios is essential. This study aims to deeply analyze factors such as the shape, area, and location of hull breaches to comprehensively understand their impact on the residual ultimate strength of the hull, providing a basis for assessing residual strength and responding to emergencies after collisions. MethodsFirst, a simplified numerical calculation method was employed to conduct a series of collision structure response calculations. By considering different speeds, angles, and impact locations, the damage conditions of the hull structure were obtained. Specifically, based on a reference experiment, finite element models of the struck and impact ships were established. The fluid's influence on the ships was simulated using the added mass coefficient to improve calculation efficiency. After verifying the accuracy of the simplified numerical calculation method by comparing with experimental results, it was applied to the collision response calculation of the Coast Guard 2501 ship. Then, using the nonlinear finite-element software Abaqus-Explicit, the residual ultimate strength of the ship was studied. The quasi-static method calculated the residual ultimate strength of the damaged cabin section under collision loads, and explored the influence of different breach forms on the residual ultimate strength of the ship structure. ResultsThe research results show that two key factors significantly affecting the residual ultimate strength of the ship are the breach area and location. The breach shape has a smaller effect on the residual ultimate strength magnitude but a greater impact on the structural fracture pattern. As the breach area increases with the same shape, the residual ultimate strength of the structure continuously decreases. For example, in the case of a 30-degree impact angle and a speed of 15 kn, the residual ultimate strength decreased by 10% in the hogging state and 18% in the sagging state. When the breach areas are similar in size, as the breach edge becomes sharper, the angle between the fracture path and the middle cross-section of the cabin section gradually decreases, and the fracture location moves towards the center of the structure. In addition, the impact speed has the most significant effect on the breach area, showing a positive correlation. As the impact angle changes, the breach shape also changes. When the impact angle is small, damage along the ship's length is larger, and as the angle increases, damage along the ship's width gradually increases. When the impact angle is 90 degrees, the side breach forms an isosceles triangle, causing greater damage to the internal structure. ConclusionsThese findings provide a foundation for evaluating the residual ultimate strength of ships. By varying the impact speed, angle, and location, the effects of the breach area, shape, and location on the residual ultimate strength of the structure can be equivalently simulated. This provides important reference for emergency handling after ships encounter collisions during navigation, helping formulate more scientific and reasonable emergency response strategies and improving ship safety after accidents.
Aug. 30, 2025Vol. 20 Issue 4 152 (2025)
Chen CHEN, Hong ZHOU, Ziqiu LI, Zhengda LÜ, and Siyu PAN
ObjectiveHigh stiffener web height I-girders on large cruise ships are made of thin welded plates, which lead to noticeable weld distortion and stresses during manufacturing, and can affect the load-bearing characteristics of the structure. Therefore, in order to consider the influence of welding deformation, this study investigates the failure behavior of high stiffener web height I-girders. MethodThis study uses the 450 mm I-girder as the subject of investigation. Based on the actual welding parameters, the welding deformations and stresses were calculated using thermo-elastic-plastic finite element method, which served as the initial state for nonlinear finite element calculations to simulate the structure's failure behavior under vertical loads. ResultsThe initial welding deformation increases the instability of the structure when subjected to vertical compressive loads, which greatly weakens the ultimate load-bearing capacity, and the ultimate load was reduced by 35.74%. However, the effect of the welding stress was less pronounced than that of deformation.ConclusionThe results demonstrate that the welding at the T-joint affects on the structural load-bearing characteristics, and the weakening effect of welding deformation should be considered in the strength calculation of the actual ship structure, with appropriate reinforcement or corrective measures to be implemented.
Aug. 30, 2025Vol. 20 Issue 4 164 (2025)
Dong TANG, Maohui RAN, Ye LI, Hao WANG, and Weipeng XIONG
ObjectiveTo investigate the dynamic characteristics of local structures in naval architecture and ocean engineering, the dynamic boundary equivalence method between truncated model and original model is proposed.MethodThe finite element method is used to calculate the natural frequencies and vibration modes of the V-shaped plate model with one side elastically supported under free boundary conditions, and the isolated plate model with three sides under free boundary conditions. The natural frequencies and vibration modes of the V-shaped plate model are compared with those of the isolated plate model to investigate the dynamic boundary equivalence of the truncated plate model. ResultsThe research shows that with an increase in the thickness of the attached plate, the half-wave number m of the (m, n) order of the main plate of the V-shaped plate is constant along the coupled edge direction, and the half wave number n perpendicular to the coupled edge direction increases; with the increase of the length of the attached plate, the half wave number m of the (m, n) order of V-shaped plates mode is constant along the coupled edge direction, while the half-wave number n perpendicular to the coupled edge direction decreases. When the coupling angle α between the main plate and the attached plate is between 40° and 90°, the attached plate of the V-shaped plate provides a fixed support boundary condition for the main plate.ConclusionA fast prediction method for the natural frequency of partial modes of the V-shaped plate is proposed.
Aug. 30, 2025Vol. 20 Issue 4 173 (2025)
Mingcheng XU, Shaoyu XIAO, Ruhang WANG, and Guanjun ZHANG
ObjectiveTo address the challenges of heavy workload and long iterative cycles in the lightweight design of floating raft vibration isolation system in engineering applications, this study proposes a lightweight design method based on RBF-PSO multi-objective optimization algorithm. Method Taking the plate-frame floating raft vibration isolation system as the research object, a finite element model was established using ANSYS APDL. The vibration isolation performance and impact resistance were evaluated through numerical simulation. Experimental tests were conducted to assess the vibration isolation performance of the floating raft. The accuracy of the numerical simulation was validated by comparing it with the experimental results. A full finite difference method was employed to analyze the parameter sensitivity of the floating raft vibration isolation system. Appropriate design variables were selected based on the sensitivity analysis. The lightweight design of the floating raft vibration isolation system was carried out using the RBF-PSO multi-objective optimization algorithm. Results The results show that after optimization, the mass of the raft is 63.03 kg. Compared with the original design, the weight of the lightweight raft is reduced by 31.92%. The vibration isolation performance of the floating raft system improves by 2.48 dB. The impact resistance of the equipment is also improved. The discrepancy between the optimized result obtained by the RBF-PSO algorithm and the numerical simulation calculation is less than 1%. Conclusion Therefore, the RBF-PSO multi-objective optimization algorithm can be effectively applied to the lightweight design of the floating raft vibration isolation system.
Aug. 30, 2025Vol. 20 Issue 4 185 (2025)
Shibo FU, Yecheng WANG, Huayan PU, Jun LUO, and Min WANG
ObjectiveThis paper addresses problems of shipboard transducers such as large-angle tilt during multi-dimension steering and small-space compensation suppression by proposing an isolator based on stiffness compensation (SC) and eddy current damping (ECD). MethodFirst, the structure of the isolator with SC and ECD is designed and dynamics modelling is carried out to clarify the requirements of the stiffness and damping design. The mechanism and parameters of the diamond-shaped spring, diaphragm spring and ECD are then analyzed. Finally, a finite element simulation is carried out, isolation performance with different parameters is simulated and the accuracy of the theoretical calculations and simulations is verified through experiments.ResultsThe SC mechanism is verified by stiffness simulation and experiment. It is found that the introduction of a diaphragm spring can effectively compensate for the overall radial stiffness while ensuring the necessary overall axial stiffness. The ECD mechanism and law are verified by COMSOL and experiment. The vibration simulation and experiment show that the isolation bandwidth is improved by 18.24% and 36.69% with reduced stiffness, while the peak is suppressed by 79.96% and 89.94% with increasing damping.ConclusionThe proposed configuration and mechanism can solve the problem of large-angle tilt and small space, providing a feasible solution for the high-performance vibration isolation of shipboard transducers.
Aug. 30, 2025Vol. 20 Issue 4 194 (2025)
Yuxu CHEN, Guobin WAN, and Xin MA
ObjectiveTo alleviate the contradiction between bandwidth extension and manufacturability of dual-band FSS, the bandwidth extension technology based on stub loading is studied. Method First, the main factors causing the above contradiction by conventional bandwidth extension methods are analyzed. Second, the influence of stub loading on the electromagnetic characteristics of FSS is studied, such as the reactance characteristics, shape, and quantity of stubs. Finally, the first/second transmission passbands of FSS are extended by stub loading on the grid/slots, respectively, and the mitigation effect of stub loading technology on the above contradiction is analyzed in detail. Results Simulation results show that compared with the traditional bandwidth extension method, the stub loading technology can improve the dual-band bandwidth by 48.8% and 23.2% respectively under the same metal line width (0.1 mm), and the test results are in good agreement with the simulation results. Conclusion Stub loading can effectively alleviate the contradiction between multi-band bandwidth extension and manufacturability, providing theoretical guidance for engineering practice.
Aug. 30, 2025Vol. 20 Issue 4 1 (2025)
Guojin LI, Wei MA, Yuxin MA, and Pai LI
ObjectiveA compact quad-notch UWB-MIMO antenna is proposed to address the challenges of limited installation space for ship communication devices and low communication efficiency due to the interference from other equipment signals. Method The trapezoidal antenna is constructed by cutting a portion of one side of the trapezoidal shape, adding a section of the other side as a radiating patch, and incorporating an improved corrugated I-type decoupling structure on the ground plate, with overall dimensions of 36 mm×22 mm×1.6 mm. By etching inverted "U" and "L-n" slits on the radiating patch and adding "C" parasitic branches on the left side and "U" parasitic branches on the right side near the feeder, the structure is capable of supporting WLAN (5.15-5.85 GHz), IEEE INSAT/Super-Extended C-band (6.1-6.53 GHz), X-band (7.37-7.8 GHz), and radio navigation (RN) band (9.15-9.7 GHz) applications.Results The simulation and test results show that the antenna operates in the frequency band from 2.9 to 10.7 GHz, with an isolation greater than 20 dB, and envelope correlation coefficient (ECC) of less than 0.02. Conclusion The data indicate that the antenna is well-suited for all aspects and can be widely applicable to shipboard wireless communication equipment.
Aug. 30, 2025Vol. 20 Issue 4 9 (2025)
Simi TANG, Xianbin LI, and Hanjiang SONG
ObjectiveTo mitigate the negative effects of coating radar absorbing materials on ships, such as a shift in the center of gravity, increased cost and higher maintenance workload, a multi-objective optimization design strategy based on radar echo feature development technology is proposed. This approach aims to identify the key coating areas on both the ship and its equipment. Method The proposed optimization strategy is applied to radar imaging analysis of a ship to optimize its Radar Cross Section (RCS) and coating area. Pareto and non-Pareto solution sets are generated, and engineering application scenarios are inferred through inverse modeling. Results The results show that the proposed method can accurately determine the key coating areas. Simulations yielded at least 10 Pareto optimal solutions, including bipolar solutions. When applying inverse engineering based on the Pareto solution, the ship’s total average RCS decreases by more than 53% with a coating area ration of less than 11%. ConclusionSimulation results show that the proposed method is effective and offers significant engineering value for RCS control of ship targets.
Aug. 30, 2025Vol. 20 Issue 4 17 (2025)
Tao YANG, Xiaonan ZHAO, Zhenji LIU, Tingting FAN, Liu YANG, Yu XIA, and Jingfeng CHEN
ObjectiveThis study proposes an innovative beamforming method to achieve high-efficiency harmonic adaptive beamforming through multi-mode single sideband time modulation technology.MethodA multi-mode single sideband time modulation module containing absorption states is designed. The weighted control of the equivalent amplitude of each channel is achieved by turning the absorption state of the control module on and off. Based on the classic adaptive beamforming algorithm, the corresponding periodic control timing is derived to achieve the efficient adaptive beamforming of harmonics. ResultsThe feasibility of the system is verified by numerical simulation. A harmonic beamforming system including an antenna, modulation module, and control module is fabricated in the 5 GHz frequency band. Experiments show that the main beam scanning angle error is within 1° and the null angle error is within 3.5°. Conclusion The proposed system can achieve the adaptive beamforming of harmonic beams through a single radio frequency channel, and has the advantages of a simple structure and low cost.
Aug. 30, 2025Vol. 20 Issue 4 25 (2025)
Min LIU, Zongqi CAI, Li'an BIAN, Houlu TANG, Anru LÜ, Yiqiang CHEN, and Guoguang LU
ObjectiveThis paper discusses the damage characteristics of gallium nitride (GaN)-based low-noise amplifiers (LNA) under high power microwave (HPM) pulses. MethodThe effect of HPM pulses with different pulse widths and duty cycles was studied to investigate the changes in DC and RF parameters of GaN LNA. In the experiment, the threshold power of the device was determined through continuous wave and microwave pulse testing with different pulse widths and duty cycles. At the same time, in order to better determine the damage area and the physical mechanism of LNA failure, the surface and internal areas of the chip were examined using a microscope and dual-beam FIB (focused ion beam ) devices after the chip was unpackaged.ResultsThe experimental results show that when the GaN LNA was exposed to sufficient microwave pulse power with a pulse width of 30 ns, a rising edge of 18 ns, and a falling edge of 18 ns with a period of 2 ms, the gain of the LNA decreased from 23.67 dBm to -8.91 dB, the noise factor increases from 1.59 dB to 18.13 dB, and the LNA output waveform was severely compressed. The damage was primarily caused by the formation of a micro-current channel at the gate from HMP exposure, leading to drain overcurrent and permanent device damage. Conclusion The study on the damage effects of GaN LNA under HMP pulse conditions provides important reference value for further understanding the impact of HMP pulses on GaN LNA and for improving its robustness.
Aug. 30, 2025Vol. 20 Issue 4 32 (2025)
Zhaojie WANG, Ming MAO, Dingshan LI, Mu SUN, Jinhui XIONG, Feng GAO, Qiaozhu ZHAI, He ZHANG, and Hao LIU
ObjectiveAiming at typical application scenarios in which underwater vehicles perform search tasks such as preemptive submarine harassment and patrol hunting in a target sea area, this paper explores methods for achieving efficient and seamless coverage search in unknown waters under the conditions of no prior information and being constrained by detection capabilities.MethodBy establishing a mathematical model for search path planning in unknown waters and designing a heuristic solution method based on two-stage planning for the random search strategy, the efficiency results of various search strategies in different shaped waters are obtained.ResultsIn rectangular waters, parallel search or spiral search has the highest efficiency, and zigzag search strategy has the lowest efficiency; in circular waters, spiral search has the highest efficiency; in irregular waters, parallel search, zigzag search and spiral search cannot be directly applied, and random search can find near-optimal solutions without approximating the waters.Conclusions The established mathematical model satisfies conditions such as "full coverage of unknown waters" and "completing the search in the shortest time". The designed random search two-stage planning model algorithm can plan a random search route that meets the full coverage requirements for any irregularly connected waters without discretizing the physical space of the battlefield, constraints, and decision variables.
Aug. 30, 2025Vol. 20 Issue 4 286 (2025)
Gongyi YANG, Haitao ZHOU, Chun YANG, Tao BAI, and Quan JIANG
Objective Low-speed launching of weapons from underwater vehicles can greatly reduce radiated noise. However, it may lead to collisions between the weapon leaving the launch tube and the moving vehicle if the launching velocity is too low. This paper develops an optimization model to determine the safe launch velocity, considering relevant parameters such as the vehicle’s attitude, speed and the lateral ocean current environment. The model enables immediate determination of the safe launch velocity based on real-time vehicle and environmental parameters, achieving optimal control over low-noise weapon launches.Method A novel method for weapon launch safety evaluation and analysis based on the danger point displacement envelope is proposed. Three data fitting techniques are employed to construct the weapon launch velocity optimization model using 175 working condition samples. Results The boundary spectrum and optimization model for safe weapon launch velocity are derived under conditions involving multi-influence factors and constraints. These conditions include vehicle pitch angles ranging from -5° to 5°, speeds of 0 to 4m/s, and lateral ocean current speeds from 0 to 2m/s. The study applies three fitting algorithms: multivariate polynomial fitting, polynomial response surface fitting and Kriging interpolation fitting. Among these, Kriging interpolation fitting is the most suitable for the construction of weapon safe launch velocity optimization model, with a fitting residual of 0. ConclusionThe speed of vehicle significantly impacts the safe launch velocity of the weapon only when there is a certain pitch angle. The lower limit of the safe velocity boundary spectrum is gradually affected with the increase of lateral current velocity, while the upper limit is gradually affected with the increase of the pitch angle of the vehicle.
Aug. 30, 2025Vol. 20 Issue 4 295 (2025)
Yanzhu YU, Yibing LI, and Fang YE
ObjectiveAs maritime networks continue to expand, the compute-intensive tasks of offshore terminals are growing exponentially. Due to resource limitations and limited budgets, it is difficult to handle the increasingly diverse business needs, the traditional ocean communication models have the problem of not being able to simultaneously meet the demands of terminals in terms of energy saving and efficiency as well as effectively increasing the total computational task volumn of the system. MethodsThis paper introduces a double-intelligent reflecting surface (IRS) collaborative architecture, considers deploying distributed IRS to assist users in offloading tasks to shore based MEC servers in uplink scenarios. Then, this paper considers the joint optimization of base station receiving beamforming, dual IRS joint phase shift matrix, user transmission power, and CPU computing frequency and designs a joint task offloading and resource allocation algorithm to maximize the total computational task volumn of the system under communication and computing resource constraints. This non-convex optimization problem is solved using the block coordinate descent (BCD) idea and an efficient alternating optimization algorithm based on maximal ratio combining (MRC), Lagrange multiplier method and bisection search.ResultsThe simulation results show that the proposed dual IRS-aided offshore cooperative offloading scheme can improve the system's total computational task volumn by about 7.03% compared to the baseline scheme when the total number of reflective elements is 800. This verifies that the offshore uplink energy-efficient offloading to introduce the dual IRS collaborative architecture can improve the total task volume requirement. ConclusionThe research results can provide reference for MEC communication system assisted offloading technology.
Aug. 30, 2025Vol. 20 Issue 4 303 (2025)
Jun GUAN, Yuanpeng LIU, Yangyang BAN, Ying LU, Shanting FANG, and Xiang LU
ObjectiveExisting collaborative task assignment methodologies inadequately account for the work mode of participating nodes and the communication capabilities of inter-node links, resulting in diminished node resource utilization and lower task scheduling success rate. To address these issues, a multi-priority task multi-node assignment algorithm based on network topology and preference ordering is proposed. MethodThis algorithm models the problem of assigning multiple tasks to multiple nodes as an optimization problem aimed at maximizing task execution benefits and maximizing the participating nodes number. A heuristic method is then proposed to solve this optimization problem. Initially, the heuristic method assigns the minimum number of nodes to each task to maximize the number of successfully assigned tasks. Subsequently, it expands the node set for each task to maximize the number of participating nodes. ResultsThe simulation results show that a task assignment success rate of 80% can be achieved with just six nodes in scenarios with abundant bandwidth resources. ConclusionThis indicates that the proposed multi-priority task multi-node assignment algorithm has obtained a locally optimal solution under constraints such as node work mode and inter-node link capacities.
Aug. 30, 2025Vol. 20 Issue 4 313 (2025)
© Copyright 2018-2021 | Chinese Laser Press.
All Rights Reserved 沪ICP备15018463号-20