




 View fulltext
View fulltext

2021
Volume: 29 Issue 10
22 Article(s)

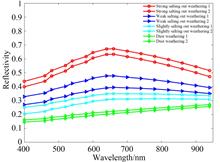
Chi-peng CAO, Hui-qin WANG, Ke WANG, Zhan WANG, Gang ZHANG, and Tao MA
To overcome the problem of a single spectral feature not finely characterizing the type and degree of weathering in the complex weathering area on a grotto surface, this paper proposes an intelligent quantitative evaluation method for grotto surface weathering based on spectral analysis and colorimetric theory. First, we reconstruct the reflection spectrum of the multispectral image of the grotto surface, calculate the color difference between each pixel and reference point, and use the principal component analysis method to extract the principal component features from the multispectral image data. Then, we fuse the spectral color difference and principal component features of the weathering on the grotto surface to characterize different types and degrees of weathering. Finally, a random forest classifier is used to intelligently evaluate the weathering degree of each pixel in the grotto surface multispectral image. Experiments show that the method of fusing spectral chromatic aberration and principal component features performs better compared with a single spectral feature in characterizing different types and degrees of weathering in complex weathering areas. The evaluation accuracy of the overall grotto surface weathering degree is 99.86%, with a Kappa coefficient of 0.99. The proposed method can effectively realize a refined characterization of complex weathered areas.
Oct. 15, 2021Vol. 29 Issue 10 2444 (2021)
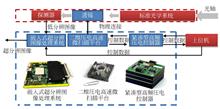
Hao-guang ZHAO, Han-shi QU, Xin WANG, Yang SHANG, Li-gang LIU, Song-wei HAN, Sen MENG, and Ping WANG
To improve the target recognition distance of the airborne electro-optical reconnaissance equipment of a UAV, this study has developed a high-speed micro-scanning super-resolution core component based on an actual engineering project. The real-time super-resolution reconstruction algorithm is implemented in the embedded platform GPU-TX2i. First, the micro-scanning super-resolution core component moves according to the preset step size and frequency to obtain a continuous image sequence with sub-pixel deviation. Then, the image super-resolution reconstruction algorithm is used based on probability distribution to process the acquired four continuous images into higher resolution images. The experimental results show that the image sequence output achieved by the detector with a frame rate of 120 fps and a resolution of 640×512 is reconstructed via super-resolution and becomes an image sequence with a frame rate of 30 fps and a resolution of 1 280×1024. After super-resolution reconstruction, the effective spatial resolution of the image is increased by 78.2% and target recognition distance is increased by 43.3%. The reconstruction time of a high-resolution image is approximately 33 ms. Furthermore, the micro-scanning super-resolution core component's micro-scan response time is < 1.0 ms and the accuracy in place is < 0.3 μm (corresponding to approximately 0.03 pixels). These results meet the real-time and precision requirements of airborne electro-optical reconnaissance equipment.
Oct. 15, 2021Vol. 29 Issue 10 2456 (2021)
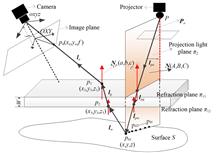
Li XU, Yong-hao ZHOU, Gui-ming LU, Jin-feng ZHOU, Fan ZHANG, and Wen-yu LUO
Aiming to remedy the degradation of underwater images owing to turbidity of mud and sand in the natural river water, and the change of light caused by underwater refraction, an underwater vision measurement method based on radial multi-line structured light is proposed in this study. First, an underwater visual measurement model based on refraction is constructed. When the projector axis is perpendicular to the refracted plane and the light-plane passes through the projected axis, landed light plane is coplanar with underwater ones, which can avoid the underwater calibration processes. The Monte Carlo simulation method is used to analyze the influence of the imaging point errors on the underwater 3D vision measurement model. Next, an interlaced central rotation radial multi-line light mode is designed. Black and white stripes are used as the projection modes to reduce the dependence on the image quality. Measurement stripes are increased, and measurement resolution is improved through central rotations. Finally, 3D topography measurement experiments on the surface of underwater objects are made, in which the influence of turbid water on the edge extraction accuracy, coded light decoding, and 3D vision measurement are analyzed. In the experiment, sediments with different weights are added in a water volume of 1 m×1.2 m×0.8 m, which simulates the natural water environment. The experiment shows that at a measurement distance of 1500 mm, the surface of a bottle is measured in clean water, with a plane residual error of 0.95 mm; the plane residual errors are respectively 1.93 mm, 5.43 mm, 21.43 mm in muddy water with 40 g, 60 g, 90 g of sediment. When the amount of sediment exceeds a certain value (such as 60 g sediment in this experiment), the accuracy of fringe extraction deteriorates sharply. The residual error of measurement plane fitting in muddy water with 40 g and 90 g of sediment increases from 1.93 mm to 21.43 mm.
Oct. 15, 2021Vol. 29 Issue 10 2465 (2021)
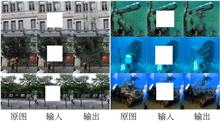
Tao XU, Ji-yong ZHOU, Guo-liang ZHANG, and Lei CAI
When large areas of an image are missing owing to unspecified factors, existing image restoration models usually cannot repair the image effectively, leading to repair results that suffer from discontinuity in their characteristics. This study proposes a fine restoration method for incomplete images with external and image features. First, we improved the dynamic memory networks (DMN+) in our study. DMN+ scheme combines the in-field features of an incomplete image and the related off-field features, generating an optimized image of the defective image containing external and image features. Next, a generative adversarial generative network with piecewise gradient penalty constraints is constructed. The network instructs the generator to perform a coarse repair on the optimized mutilated image, which results in a coarse repair image of the target to be repaired. Finally, the coarse restoration map is further optimized based on the idea of coherence of related features, and a final fine restoration image is obtained. The algorithm proposed here is verified on three image data sets with varying complexities. Moreover, the visual effects and objective data results of the proposed algorithm are compared with those of the existing dominant restoration model. The restoration results of our model are more structurally sound in terms of texture. Furthermore, our model is superior to other models in terms of both visual effects and objective data. The peak signal-to-noise ratio in the most challenging Underwater Targe dataset is 27.01, with a structural similarity index of 0.949.
Oct. 15, 2021Vol. 29 Issue 10 2481 (2021)
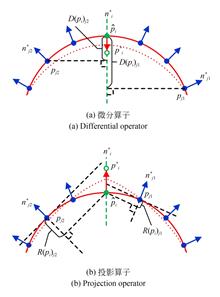
Xiao-wei FENG, Hai-yun HU, Rui-qing ZHUANG, and Min HE
To suppress 3D point cloud noise, a feature-preserving reconstruction method using sparse optimization is proposed, which can restore sharp features while suppressing noise. First, the curvature of the underlying manifold surface is estimated using the eigenvalues of the local tensor matrix, which is constructed by using the neighboring points. To avoid the influence of outliers on normal estimation, pair consistency voting is used to realize robust statistical identification of feature points in the neighborhood. In the L0 minimization framework, an adaptive differential operator, based on feature identification, is introduced to avoid generation of artifacts in the alternating optimization process, and the projection regularization term is used to alleviate curved surface degradation. According to the optimized normal field, the sharp features are restored by projection optimization. The experimental results show that the reconstructed point cloud error is reduced by 10.2% on average, and the normal error is reduced by 29.7% on average. In addition, the subjective visual effect is better than several state-of-the-art algorithms. The introduced method can effectively improve the point cloud quality and provide technical support for 3D measurement and reverse modeling based on the point cloud.
Oct. 15, 2021Vol. 29 Issue 10 2495 (2021)
Jun Yang, and Min-min Zhang
To accurately capture the context information of three-dimensional (3D) point cloud shapes and improve the accuracy of segmentation, we propose a method for the co-segmentation of 3D shape clusters using shape similarity. First, a Farthest Point Sampling is performed on the point cloud shape to obtain the centroid point, and a random pick method is used to determine the neighborhood points to construct a spherical neighborhood. Then, the feature aggregation operator is used to encode geometric topological relationships of 3D point cloud. The associated features among the neighborhood is extracted, and a spatial similarity matrix is constructed using the centroid coordinates of each spherical neighborhood. The spatial similarity matrix sums the weighted local features of the shape extracted by the encoder network to complete the collaborative analysis of the 3D shape. Finally, a hierarchical feature extraction network is built to decode the weighted associated features and complete the shape cluster co-segmentation task. Experimental results show that the co-segmentation accuracy of our algorithm on the ShapeNet Part dataset reaches 86.0%. Compared to the k-nearest neighbor algorithm, using the random selection method within a sphere as the neighborhood point sampling strategy can increase the segmentation accuracy of the network by 1.5%. Compared to the use of shared multilayer perceptrons for feature extraction, the use of feature aggregation operators for convolution operations can increase the segmentation accuracy of the network by 5.6%. Moreover, compared to the current mainstream shape segmentation algorithms, the segmentation accuracy of the proposed algorithm is superior.
Oct. 15, 2021Vol. 29 Issue 10 2504 (2021)

Yong-ning ZOU, Zhi-bin ZHANG, Qi LI, and Hao-song YU
Crack segmentation plays an important role in industrial CT image processing. However, interference in CT images, such as noise and artifacts, can adversely affect the accuracy and precision of crack segmentation. To improve crack segmentation precision in CT image processing, this paper analyzes the characteristics of cracks in CT images, and proposes a method for CT image crack recognition and segmentation that combines a Hessian matrix with a support vector machine. Firstly, a linear filter based on a Hessian matrix is used to extract the linear structures from a CT image and enhance the contrast of these linear structures. Moreover, to represent the texture features of these linear structure images, the method directly extracts textural feature information using a Grey Level Co-occurrence Matrix, which reflects the spatial distribution of grayscale. In addition, a crack identification classifier is trained by a Support Vector Machine (SVM), which is based on a Radial Basis Function (RBF) kernel. Furthermore, the crack identification classifier is used to locate the block area positions of cracks in CT images. Finally, the binary segmentation results for cracks are obtained by Otsu threshold segmentation. The experiments demonstrate that this proposed method can improve the anti-jamming resistance of the algorithm by shielding the non-interest region in the image, and the recognition accuracy reaches 94.5%. This algorithm has practical engineering application value as it has high recognition accuracy and high segmentation accuracy.
Oct. 15, 2021Vol. 29 Issue 10 2517 (2021)
Jia HAO, Yan WANG, Kui ZHOU, Xiao-chang YU, and Yi-ting YU
As the core optical device of the division-of-focal-plane (DoFP) polarization imaging system, the micropolarizer array (MPA) exerts an important influence on the reconstruction of the polarization information from scene targets. In this paper, to correct for the resolution loss and instantaneous field of view (IFOV) error of the traditional 2×2 MPA, as well as the limitation that the existing model can only design 2×N series MPA, a design model was proposed based on Fourier frequency domain, which can cover 2×N series and N×N diagonal series MPAs. In addition, three new types of diagonal MPAs were suggested and optimized. Through theoretical analysis, field experiments and numerical simulations, the reconstruction performance of the existing MPAs and the newly designed MPAs was qualitatively analyzed and quantitatively tested. The simulation results show that the 2×2×2 MPA provides the highest reconstruction quality for S0, S1, and S2, and the degree of linear polarization (DoLP) in terms of quantitative measures and visual quality, while the new 3×3 MPA achieves the best reconstruction results for the single detector snapshot imaging system. The application of the improved model and the proposal of new MPAs in this paper provide a theoretical basis for the development of diverse and high-performance MPAs, and promote the practical application of the DoFP polarization imaging system.
Oct. 15, 2021Vol. 29 Issue 10 2363 (2021)
Dong-ming LI, Wan-lei WANG, Ying JIA, and Shuai LÜ
To improve ultrasonic suspension bearing performance, a design method for structural optimization of radial inclusive ultrasonic suspension bearings is proposed. A mathematical model of natural frequency and radial deflection of bearing shell structure was established based on flat shell and elasticity theory. The three parameters shell structure, length, and radius and wall thickness, were taken as the design variables, and the natural frequency and radial deflection of shell structure were taken as the functional optimization objective. A multi-objective genetic algorithm was used to solve this problem. From the Pareto solution set obtained, a set of solutions most in line with design requirements (40 mm in length, 10 mm in radius, and 2 mm in wall thickness) were selected as the optimization results. To verify the efficacy of the optimization method in this paper, three groups of bearings were made for comparison testing. Experimental results show that the optimized bearing structure takes ultrasonic suspension bearing natural frequency and radial deflection performance requirements into account, and can produce a large radial suspension force. This research method and the results of this study can provide important and significance guidance for the design and manufacture of new ultrasonic suspension bearings.
Oct. 15, 2021Vol. 29 Issue 10 2375 (2021)
Zheng XU, Yan-wen QIAN, Shao-chun QIN, Xiao-dong WANG, and Xiao-yu XU
To solve the problem of high-viscous adhesive micro-dispensing for micro-assemblies, the technology and equipment of electrostatic loading and force feedback are presented. With finite element modeling simulations, the influences of factors such as the initial height of the transfer head from the adhesive surface and current on the adhesive droplet-loading and transferring process were analyzed. The main specifications and key components for the dispensing process were determined, and the complete micro-dispensing process was constructed. Moreover, both the hardware framework and control software for the prototype machine were developed. Finally, micro-dispensing experiments for epoxy resin adhesive were performed to verify the performance of the device. Experimental results show that the volume and radius of the loading and transferring droplet can be controlled by the initial height and threshold current that trigger the breakup of the liquid bridge. The radius and volume of the transferred droplet can be controlled in the range of 96-193 μm and 0.43-2.81 nL, respectively. The consistency error of the final-transferred droplet is 4%. The novel method and device can significantly improve the performance of high-viscous adhesive micro-dispensing.
Oct. 15, 2021Vol. 29 Issue 10 2386 (2021)
Gao-feng ZHENG, Jia-xin JIANG, Guo-yi KANG, Kai ZHANG, and Jian-yi ZHENG
Precise deposition of micro/nano patterns, and integrated manufacturing of micro functional devices are key to the application of electrohydrodynamic direct-writing (EDW), a phenomenon that highlights the urgent requirement for a stable jet. A fuzzy controller was introduced to build a closed-loop controlling system to overcome the shortcomings of multi-interference parameters, and lack of controlling models in EDW technology. The jet behaviors electrospinning current, and line width of printed micro pattern were investigated. Two optical grating encoders with linear and circular structures were direct-written to measure respective linear and angular velocities. A velocity sensing system was constructed to measure the performance of these two direct-written optical grating encoders. Jet stability and uniformity of printed structures were enhanced by the closed-loop controlling system, which decreased line width range from 40-140 µm to 50-100 µm. The measurement ranges of the direct-written linear optical grating for linear velocity and the ring optical grating for angular velocity were 0-100 mm/s and 0-100 (º)/s, and the measurement errors were less than 0.87% and 0.74%, respectively. A fuzzy closed loop control is a promising method for increasing the stability of EDW technology and integrated manufacturing accuracy of micro devices, which would accelerate the industrial application of micro/nano inkjet technologies.
Oct. 15, 2021Vol. 29 Issue 10 2393 (2021)
Long-hui LI, Zhi-qi ZHANG, Zhen GUO, Yuan-yuan LUO, Lian-qun ZHOU, and Jia YAO
To solve the problems of large computational capacity requirement, high residual vibration, and long settling time when a high-precision flexible scanning platform moves, by using the existing motion profile model, an optimized order polynomial motion profile model based on the principle of optimized time is proposed. A simplified model of a high-precision flexible scanning platform was established, and residual vibration simulation for motion profiles using different order polynomials was carried out with limitations set on velocity, acceleration, and jerk and its derivative. The optimal polynomial motion profile equation with optimal order polynomial as determined by simulation results was solved, and residual vibration experiments on a high-precision flexible scanning platform were carried out. Compared with the traditional trapezoidal motion profile, for the high-precision flexible scanning platform using the optimal polynomial motion profile, the residual vibration acceleration peak was reduced by 67.91%, and the settling time was reduced by 49.92%. Compared with the conventional third-order polynomial motion profile, for the high-precision flexible scanning platform using the optimal polynomial motion profile, the residual vibration acceleration peak was reduced by 42.94%, and the settling time was reduced by 32.50%. The optimal polynomial motion profile displayed good performance. The optimal polynomial motion profile model proposed in this study can overcome the problems of large computational capacity requirement, high residual vibration, and long settling time in the application of a high-precision flexible scanning platform with the existing motion profile model. These experimental results show that the motion profile model effectively reduces residual vibration and settling time and improves the efficiency and performance of the high-precision flexible scanning platform.
Oct. 15, 2021Vol. 29 Issue 10 2400 (2021)
Xuan-ju DANG, and Si-ying HE
To investigate the effects of complex hysteresis characteristics owing to multi value correspondence and asymmetry on the control accuracy of flexible industrial robot joints, this study proposes a neural network modeling method for complex hysteresis characteristics of asymmetry and strong nonlinearity utilizing the PI (Prandtl Ishlinskii) model framework. Based on the structure of symmetric Play operator in the PI model, the linear part of Play operator is replaced by a new operator that is a nonlinear function constructed by two modified Sigmoid functions with asymmetric nonlinear hysteresis behavior. The new operator is used as the active function that constructs the neural network hysteretic model for capturing the complex hysteresis characteristics of flexible joints. The model is verified using experimental data obtained under different input conditions of flexible joints, and the results show that the maximum prediction error can be controlled within 1°. Compared to the PI model, the maximum error and the root mean square error are reduced to one fifth. Furthermore, it can be proved that the hysteresis neural network has good generalization ability with a modeling accuracy that is greatly improved.
Oct. 15, 2021Vol. 29 Issue 10 2412 (2021)
Lie BI, Juan ZHANG, Yi YANG, Wen-rong WU, and Xi DAI
To address the problem of weak micro-parts vulnerable to interference fit damage in MEMS manufacturing, an interference fit control method for weak micro-parts was studied. The micro-assembly process of the thermomechanical package component (key component in inertial confinement fusion research) was our research topic. First, to address difficulty in detecting deformation of the silicon arm in the assembly process owing to the small assembly space and visual occlusion, a detection method based on gray-scale variations was proposed, and a model of the relationship between gray-scale and deformation was established. Next, to address difficulty in detecting the tiny pose deviation between the silicon arm and the sleeve owing to limited microscopic visual detection accuracy, a qualitative method of judging the pose deviation, based on pressure deformation analysis, is presented. Finally, a quantitative method for assessing the pose deviation was proposed based on gray-scale variations and geometric analysis of parts, completing the overall control strategy design. Experimental results indicated that the proposed method is effective, and thermomechanical package assemblies with interference of 20 µm~26 µm were realized. This method is suitable for interference fit of micro-axis and micro-hole parts in MEMS manufacturing.
Oct. 15, 2021Vol. 29 Issue 10 2421 (2021)
Environmental humidity control method for structural reading and writing based on micropipette probe
Xiao-bo LIAO, Jian ZHUANG, Lei CHENG, Jiu-lin YANG, and Qiang-qiang ZHENG
To overcome the adverse effects of environmental humidity changes on structural reading and writing using a micropipette probe, this study designs a double air chamber structure with mixing and working chambers, and evenly distributes the air flow holes in the partitioning in the work chamber to form a uniform micro air flow. The purpose of these designs is to ensure uniform humidity in the micro-nano processing area of the working chamber and reduce the impact of air flow disturbance on the micro-nano working area. Then, the rationality of the double-air chamber structure with mixing and working compartments was verified by numerical simulation. When the working chamber is inflated on both sides with a flow rate of less than 0.06 m·s-1, airflow disturbance at the working point is less than 50 μm·s-1. Experiments using homemade experimental equipment demonstrated that the system can maintain the humidity of the working chamber at a given value (ambient temperature 25℃) for a duration of 5 min, with a steady-state error in relative humidity of 2.59%. Comparing the micropipette probe electrodeposition (write) structure quality and scanning (read) imaging quality at different humidities revealed that the environmental humidity control method can meet the work requirements of micropipette probe micro-nano reading and writing. Therefore, the microenvironment humidity control method has important practical significance for improving the stability and reliability of micropipette-based probe micro structure manufacturing and detection.
Oct. 15, 2021Vol. 29 Issue 10 2432 (2021)
Yan-hong LI, Shuai YANG, Shun TANG, Wei-qian ZHAO, and Li-rong QIU
To improve the measurement accuracy of curvature radius, a method of detecting divided aperture laser differential confocal radius measurement was proposed. In this study, the principle of this new measurement and the algorithm of virtual pinhole positioning were explored. The detection light path of the confocal measurement system was blocked by a D-type aperture such that half of the measurement beam was focused on the focal plane detection charge-coupled device (CCD). The Airy disk detected by the CCD was divided into focal spot differential subtraction normalized detection using the virtual pinhole positioning algorithm. Then, the zero point of the differential confocal curve was used to accurately determine the focus of the "confocal" position and the "cat's eye" position of the test lens, measuring the distance between them. Finally, a high-precision measurement of the radius of curvature was achieved. Experiments and analysis show that the radius of curvature measured by this method is -121.209 4 mm, with a repeatability better than 5×10-6, without the need to adjust the hardware according to the parameters of the measuring objective and tested lenses. This meets the requirements for high-precision measurement of the radius of curvature and simplifies the optical path structure, reducing the structure and adjustment costs and providing a new method for rapid and high-precision measurements of the radius of curvature.
Oct. 15, 2021Vol. 29 Issue 10 2287 (2021)
Jian-bang MAO, Peng-hui WANG, Jing-yuan WANG, Jian-hua LI, and Wei WEI
Considering that semiconductor photodetectors at transceiver of solar-blind ultraviolet communication (UVC) are insensitive to solar blind band and lower responsiveness, a scheme for receiving ultraviolet communication was proposed based on wavelength down-conversion of fluorescent materials. Using two fluorescent materials developed by our group (Sn-doped silicate fluorescent glass and fluorescent dye polystyrene), visible light detection in the range of 450-650 nm was realized by LED @270 nm excitation. The results show that compared with the original detection signal of an APD photodetector, the detection response to 270 nm is significantly enhanced when the fluorescent convertor material is attached to the window front of the APD photodetector. For Sn-doped silicate glass, the detector reception response is improved by 1.5 times at 1 kHz. For dye-doped polystyrene, reception sensitivity is increased by 2 times when the modulation rate of the light source is lower than 1.8 MHz. While retaining the advantages of UVC communication, these investigations propose a new research idea and method for improving the detection sensitivity of semiconductor photodetectors.
Oct. 15, 2021Vol. 29 Issue 10 2296 (2021)
Yong-xing GUO, Yue-hui YANG, and Li XIONG
Shape information feedback during soft robot operations is critical for its precise control. Due to its flexible body characteristics, high flexibility is a pre-requisite for the mounted shape measurement sensor. Therefore, flexibility of fiber Bragg gratings sensing technology for soft robots was evaluated in this study. In this article, a flexible sensor based on double-layer orthogonal fiber Bragg grating for 3D shape measurement is proposed, and the structure, and measurement principle of the sensor are explained. The sensor prototype comprises two layers of 4×4 fiber Bragg gratings arrays. The curvature calibration experiments of the sensor were carried out in the horizontal and vertical directions, and the linear incremental relationship between the wavelength shift and the curvature was obtained. Then, the three-dimensional shape measurement was optimized, and the three-dimensional coordinate system was established by measuring the curvature of the spatial sensing point, and converting the curvature information into spatial coordinate information. Next, the three-dimensional shape of the measured object surface was reconstructed through interpolation and fitting to the discrete coordinate points in space. The flexibly-shape sensor can realize the three-dimensional shape perception of complex curved surfaces, with a curvature measurement error range of 2.8%-4.5%. The fiber Bragg grating flexible sensor proposed in this article can provide technical support for the shape measurement of soft robots.
Oct. 15, 2021Vol. 29 Issue 10 2306 (2021)
Jin LI, Hao YAN, and Jie MENG
Photonic crystal fiber gas detection technology is of particular interest for developing a compact, low power consumption, and intrinsically safe laser absorption spectrum gas detection system. First, by optimizing the structural parameters of photonic crystal fibers, over 90% of the optical field modes can be bound near the fiber core, and the relative gas detection sensitivity can be increased to more than 60%. Further, the limitation loss is reduced to 10-8 dB/m. To obtain higher relative detection sensitivity and lower optical loss, the optical mode can be optimized by adjusting the core microstructure parameters and the array arrangement of the cladding photonic crystal air holes. Then, the gas detection technologies of the end reflection type, fiber grating wavelength modulation type, and different fiber composite types are analyzed. However, it is difficult to ensure the efficient exchange of gas molecules. Combined with special fiber structures such as Bragg grating and long-period grating, an optical resonator can be constructed to effectively enhance the absorption path of optical signal and gas molecules. The design of a composite optical fiber gas probe with different types of optical fiber and gas sensing materials significantly optimizes the selectivity and sensitivity of gas sensing. The optical path can be increased effectively by expanding the optical fiber to > 1 m or using the ring embedding method, resulting in a detection limit up to the ppb level. Moreover, the introduction of erbium-doped fiber can effectively compensate for the optical loss in the fiber ring. Finally, the gas detection performance and future research direction of the porous ring and grapefruit photonic crystal fiber with a large hollow core diameter are analyzed. In the future, to provide technical support for the development of real-time monitoring instruments for hazardous gases in metallurgical and chemical industries, it is necessary to research the performance optimization, system integration, and environmental adaptability of photonic crystal fiber gas laser absorption detection technology.
Oct. 15, 2021Vol. 29 Issue 10 2316 (2021)
Qi LIU, Jing WANG, Mao-hai HUANG, and Jian-yan WEI
Cosmic rays interfere with target recognition and extraction and this is a common phenomenon detected in charge-coupled device (CCD) and complimentary metal-oxide semiconductor images taken in space. In this study, we proposed a recognition algorithm based on stellar astrometry for space astronomical images, enabling us to extract a total of 29 731 cosmic-ray events in the 230 CCD images taken by the Chang'e-3 Lunar-based Ultraviolet telescope (LUT). On the one hand, this number was 11.14% more than the one detected by traditional Laplace algorithm, which was primarily because of events detected with a shape similar to a star. On the other hand, our algorithm failed for only 1.93% of the cases detected by the Laplace algorithm. Among these failed cases, 48.64% were stars, indicating misidentification by the Laplace algorithm. In addition, although peaks appeared at a higher value, the distribution of the electron deposition on the LUT CCD was comparable with those reported for the two Hubble Space Telescope CCDs. With a two-dimensional distribution of the incident angle of cosmic rays on the CCD surface, we identified significant excesses in two directions, which could be understood by a smaller equivalent aluminum thickness of the Chang 'e-3 lander. Finally, we built a public library of cosmic rays recorded by the LUT CCD by extracting the patterns of all the detected cosmic rays, which might be useful for future space telescope image simulation systems.
Oct. 15, 2021Vol. 29 Issue 10 2330 (2021)
Qin-ying LIU, Yu-guo TANG, Nan OUYANG, Gui-qin LI, and Min LI
In order to achieve high-speed in vivo pathological diagnosis of the digestive tract, a design method for an endoscopic optical coherence tomography system with high-speed and stable imaging was proposed. Firstly, in order to realize high-speed endoscopic imaging, a high-speed endoscopic optical coherence tomography system was developed by using a 200 kHz swept source, and the hardware accelerated processing technology, combining field programmable gate array and graphics processing unit was used to realize real-time data processing. Secondly, in order to improve the stability of imaging, the pulse signal fed back by the encoder was used for system logic control, which effectively corrects the image drift. Finally, the stability and imaging speed of the system were tested and analyzed, and the colorectal imaging experiment was carried out in a mouse. The experimental results show that the real-time imaging speed of the system can reach 141 frame/s when the image size is 1 024×1 333 pixels, and under the logic control timing, the system image stability is improved from 87.0% to over 98.6%. The optical coherence tomography imaging results from the mouse colorectum are consistent with those of the pathological sections. The system developed in this paper is characterized by high-speed and stable imaging, which can clearly distinguish the tomographic structure of the mouse colorectal tissue in vivo and in real time. It is expected to provide a new diagnostic method for the real-time pathological diagnosis of body cavity diseases.
Oct. 15, 2021Vol. 29 Issue 10 2340 (2021)
Yue-jie SHU, Jun WU, Shi-liang ZHOU, and Jun-jie WANG
To detect the damage of a high-piled wharf, the deflection measurement method, static damage characteristics, and damage identification method were studied. First, the deflection of the high-piled wharf was measured using two symmetrically arranged fiber Bragg grating strain sensor arrays, according to the relationship between strain and curvature and curvature and deflection. Then, the deflection function of the pile under multiple damage conditions was derived, the static characteristics after damage were analyzed, and the damage identification index was determined. Finally, a method for the segmented damage identification of the pile was proposed, and verified by numerical simulation and a physical model experiment. Numerical calculation results show that the calculated damage is essentially the same as the preset damage location, with a maximum damage measurement error of 3.3%. The physical model experiment shows that the preset damage is within the measured damage range, the pile section damage coefficient is consistent with the measured damage degree, and the linearity is 0.887 5, thus indicating that the fiber Bragg grating sensor array can effectively identify the damage. This method is suitable for piles before and after damage and has the advantages of providing a clear physical meaning, with no optimization algorithm and long-term monitoring, etc., thus meeting the needs of pile-damage monitoring for high-piled wharfs.
Oct. 15, 2021Vol. 29 Issue 10 2349 (2021)
© Copyright 2018-2021 | Chinese Laser Press.
All Rights Reserved 沪ICP备15018463号-20