




 View fulltext
View fulltext

2021
Volume: 29 Issue 9
26 Article(s)

Man-ling TIAN, Dong-hui LIU, Xiao-min CAO, and Kuang-lu YU
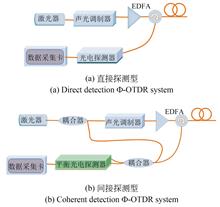
Phase-sensitive optical time domain reflectometry is widely used in perimeter security and other fields because of its advantages of wide monitoring range and high sensitivity. In recent years, researchers have improved optical systems to increase sensing distance and spatial resolution, thus greatly increasing the amount of data that needs to be processed. In addition, strong environmental noise and diverse types of vibrations bring challenges to the practical application of distributed vibration sensing systems. This study summarizes the signal processing methods used to improve the signal-to-noise ratio and vibration recognition rate of the system, including noise reduction algorithms, feature extraction algorithms, machine learning, and deep learning algorithms; compares the advantages and disadvantages of different algorithms; and finally outlines the possible direction of signal processing methods in this field in the future.
Sep. 15, 2021Vol. 29 Issue 9 2189 (2021)
Yue-bo MENG, De-wang SHI, Guang-hui LIU, Sheng-jun XU, and Dan JIN
Natural-scene text-detection algorithms based on deep learning have made significant progress; however, they only apply to texts with dense and irregular layouts. Owing to its small spacing and dense distribution, it is difficult to extract features from texts and the detection remains incomplete. Meanwhile, the existing text detection methods often use the direct splicing of different dimensional features, leading to insufficient multi-scale feature fusion and the loss of semantic information. To solve these problems, a dense irregular text detection method is proposed based on multi-dimensional convolution fusion. The network follows the FPN structure and utilizes a text enhancement module (TEM). By using additional global text mapping, the network pays special attention to the text information. A channel fusion strategy (CFS) is proposed, which uses the bottom-up method to establish the high-low dimension feature information chain to generate the feature map with richer semantics and reduce the information loss. In the prediction stage, text prediction results are generated through the gradual expansion of the text kernel. Experimental results on DAST1500, ICDAR2015, and CTW1500 datasets yield F values of 81.8%, 83.8%, and 79.0% respectively. The proposed algorithm not only has better performance in dense and irregular text detection but also shows a certain level of competitiveness in the case of general natural scene texts (multi-directional, curvilinear text).
Sep. 15, 2021Vol. 29 Issue 9 2210 (2021)

Xiao-dong MU, Kun BAI, Xuan-ang YOU, Yong-qing ZHU, and Xue-bing CHEN
To solve the problem of lack of labeled data in the feature extraction and classification from remote sensing images using deep learning, a simple contrastive learning method involving the use of an asymmetric predictor was proposed. First, the input image is enhanced using horizontal flipping, color jitter, and grayscale methods to obtain two related views of the same image. Subsequently, they are fed into the two branches of a Siamese network for feature extraction. Next, asymmetric predictors are used to transform the features, and the network is optimized by maximizing the similarity between them. Finally, a linear classifier is trained by fixing its parameters to complete the feature classification. When 20% of the labeled samples are used for fine-tuning in the four public remote sensing image datasets, NWPU-Resisc45, EuroSAT, UC Merced, and Siri-WHU, the classification accuracies of the experiments are 77.57%, 87.70%, 60.52%, and 65.83%, respectively. Our proposed method can effectively extract the high-level semantic features of remote sensing images without using data labels and has better performance than the ImageNet pre-trained model and the latest contrastive learning method SimSiam under the conditions of insufficient number of labeled samples.
Sep. 15, 2021Vol. 29 Issue 9 2222 (2021)

Mei-tu YE, Jin LIANG, Lei-gang LI, Mao-dong REN, and Ren-hong CHEN
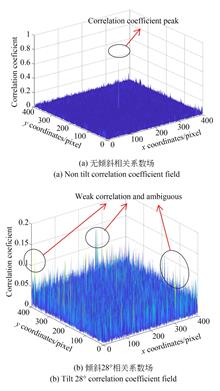
To solve the problem of weak correlations between speckle images caused by oblique perspectives, a discretized matching method of digital speckle images at large oblique angles is proposed. Based on the rule that the matching of small-sized subsets is relatively little affected by tilt, large-sized seed points are first discretized into small sized seed point clusters. Clusters are then matched, and matching results for small-sized seed point clusters are then integrated to obtain initial values for large-sized seed points. Accurate matching results can be obtained for large-sized seed points after precise adjustments. Oblique images are then completely matched through a seed point diffusion matching strategy. Finally, deformations can be calculated. An image sequence rotated by degrees within a 0–42° span was generated by simulation, and the matching test was carried out over a 7–30 pixel subset radius. Based on the test above, it was determined that oblique angle and subset size are the main factors affecting image matching. Suggestions for selecting key parameters critical for successful matching of oblique images is given. The efficacy of the proposed method is verified, and its comprehensive performance is evaluated. Numerical simulations and experiment results indicate that matching accuracy of the proposed method is within ±0.03 pixel. We also demonstrate that the proposed method effectively improves the rate of success of speckle image correlations in oblique fields of view, which can satisfy the requirements for stable matching of oblique speckle images and deformation measurements below 40°.
Sep. 15, 2021Vol. 29 Issue 9 2235 (2021)
Jun-ying CHEN, Tong-yao BAI, and Liang ZHAO
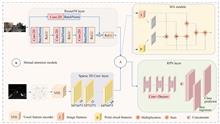
To use image information in assisting point cloud to improve the accuracy of 3D object detection, it is necessary to solve the problem of the adaptive alignment and fusion between the image feature space and point cloud feature space. A deep learning network based on adaptive fusion of multimodal features was proposed for 3D object detection. First, a voxelization method was used to partition point clouds into even voxels. The voxel feature was derived from the features of the point cloud included, and a 3D sparse convolution neural network was used to learn the features of the point cloud. Simultaneously, a ResNet-like neural network was used to extract the image features. Next, the image features and point cloud features were aligned adaptively by introducing the mutual attention module, and the point cloud features enhanced by the image feature were obtained. Finally, based on the derived features, Region Proposal Networks (RPN) and multitask learning networks for classification and regression tasks were applied to achieve 3D object detection. The experimental results on the KITTI 3D object detection data set showed that the average precision was 88.76%, 77.63%, and 76.14%, respectively on simple, medium, and difficult levels of car detection. The proposed method can effectively fuse image and point cloud information, and improve the precision of 3D object detection.
Sep. 15, 2021Vol. 29 Issue 9 2247 (2021)
Yue-sheng LIU, Xin-du CHEN, Lei WU, Yun-bao HUANG, and Hai yan LI
The sparse mixture iterative closest point (SM-ICP) method is proposed for achieving accurate alignment of point-sets, while avoiding the influence of outliers. This study investigates sparse representation, non-convex optimization, and point-sets registration. First, the registered residuals are represented by mixed regularization to establish a sparse mixture formula. The alternating direction of multiplier method (ADMM) is then integrated to solve the proposed formula using a nested framework. Among the variables, the balance weight θ for mixed regularization can be calculated using a sigmoid function. The scalar version is also provided to represent the corresponding loss of function in the inner loop of ADMM. Finally, the soft threshold formula for the scalar version can be deduced in point-set registration. Experimental results indicate that the registration accuracy of the proposed SM-ICP method is better than the that of established algorithms investigated for comparison. This improved accuracy is especially striking in the registration experiment of the Stanford bunny dataset. With 50% overlap rate, the trimmed registration error of SM-ICP was 2.04×10-4. Compared with other methods, our trimmed error was one order of magnitude lower than those of the robust Trimmed-ICP (robust Tr-ICP) and ICP algorithms. Moreover, it was approximately three times lower than the error obtained using the sparse ICP (S-ICP) algorithm. In the registration experiments for both other objects and for scene data, the registration accuracy of the SM-ICP method also performed better than comparable algorithms. In the registration experiment of point-sets with different levels of random noise, the trimmed registration error of SM-ICP was 4.90×10-6~1.33×10-4. This was several times to one order of magnitude lower than those of other algorithms. In the registration experiment for the engine blade, our method successfully achieved accurate registration of point-sets, but the results produced by comparable algorithms displayed different degrees of dislocation in their point-sets registration. In summary, the proposed SM-ICP algorithm displays advantages in accuracy, robustness, and generalization for point-set registration.
Sep. 15, 2021Vol. 29 Issue 9 2255 (2021)

Hui-qin WANG, Hong-xia DOU, Ming-hua CAO, Yu-kun MA, and Qing-bin PENG
Optical orthogonal frequency division multiplexing (OFDM) with index modulation has the advantage of high spectral efficiency (SE); however, the error performance is not optimal. In this paper, a scheme of asymmetrically clipped optical OFDM with generalized index modulation (ACO-OFDM-GIM) is proposed. In this scheme, the number of active subcarriers in each sub-block can be one or more, and these subcarriers extend the frequency domain modulation. Furthermore, a subcarrier allocation algorithm is adopted to eliminate the correlation between adjacent subcarriers. In this way, a better error performance may be achieved. Taking asymmetrically clipped O-OFDM-GIM (ACO-OFDM-GIM) as an example, the modulation mapping principle of O-OFDM-GIM has been introduced in detail. In addition, the asymptotic bit error probability of the ACO-OFDM-GIM scheme for the turbulence channel is derived and the correctness is verified via simulation. Furthermore, the performance of the ACO-OFDM-GIM system is compared with that of ACO-OFDM and ACO-OFDM-IM systems. The results showed that the transmission rate and the error performance of the ACO-OFDM-GIM scheme are improved compared with the ACO-OFDM-IM and ACO-OFDM schemes. When the SE is indifferent, the error performance of the proposed scheme is greater than ACO-OFDM and ACO-OFDM-IM systems at a large signal noise ratio (SNR). When the bit error rate is 1×10-4, the SNR of (4,[1,2]) ACO-OFDM-GIM scheme outperforms that of (4,2) ACO-OFDM-IM and ACO-OFDM schemes nearly 2.5 dB and 4.5 dB, under a strong turbulence channel, respectively. Therefore, the ACO-OFDM-GIM scheme is expected to effectively improve the transmission rate of atmospheric laser communication in the future.
Sep. 15, 2021Vol. 29 Issue 9 2268 (2021)
Sai LI, Hao-jiang LI, Li-zhi LIU, Tian-qiao ZHANG, and Hong-bo CHEN
To automate the location of stable anatomical points in head magnetic resonance imaging (MRI), an automated anatomical point locating procedure using head MRI images has been proposed that relies on hourglass network (HN). In this method, the basic HN structure is used to extract and fuse multi-scale features. The scale attention mechanism is introduced in the fusion of multi-scale features to improve anatomical point location accuracy. This method uses the differential spatial to numerical transform (DSNT) layer to locate anatomical points using coordinate regression of the predicted heat map generated by the convolution neural network. Five hundred head MRI images were used for training, whereas three hundred images were used for testing. Accuracy of the proposed method for location of four anatomical points was >80%. Compared with the common methods currently used to locate key points, the proposed method achieved the best results. This method can assist doctors in marking anatomical points in images and provide technical support for automated registration of head MRI and big data analyses of head diseases.
Sep. 15, 2021Vol. 29 Issue 9 2278 (2021)
Bo-wen SONG, and Jia-wen LI
To realize rapid mass fabrication of microrobots, in this study, a femtosecond Bessel beam superposition interference method is proposed to generate a circular light with side lobes. Combined with dynamic holographic processing, this method enables hollow helix microrobots to be efficiently fabricated. First, Bessel holograms generated according to the Bessel transmission function are superposed, and the generated light field is simulated and experimentally measured. Next, ring structures with different numbers of side lobes (2-4) are fabricated using the superimposed holograms, and the effects of two parameters on the width of the side lobe and diameter of the ring are analyzed. Subsequently, hollow double helix microrobots with widths of 25 µm and lengths of 100 µm are rapidly fabricated by introducing the dynamic holographic processing method. Finally, the microrobots are driven by a rotating magnetic field in a microfluidic environment. Experimental results indicate that only 6 s are required to process a microrobot and that the microrobots advance 400 µm in a straight line in 7 s under a rotating magnetic field. This method provides a promising means of mass manufacturing helix microrobots and has immense application value in fields such as noninvasive surgery and drug delivery.
Sep. 15, 2021Vol. 29 Issue 9 2101 (2021)
Jie CHEN, Bang-jun MA, Xiao-long WANG, Tian HAN, and Jun-sheng LIAO
Redeposition is a common phenomenon in focused ion beam (FIB) sputtering, rendering the absence of a steep sidewall and actual processing size to be considerably different from the proposed design, particularly for high-aspect-ratio microstructures. To improve FIB microsputtering, a single-pixel line-assisted sputtering (SLAS) protocol based on local correction by additional sputtering is proposed to eliminate the redeposition effect and to significantly improve the perpendicularity of V-type sidewalls for a trench microstructure. A theoretical method based on a continuous cellular automaton (CCA) was utilized to simulate the redeposition effect and the perpendicularity improvement of V-type sidewalls upon the application of SLAS. Moreover, the CCA-based simulation suggested a contradiction between sidewall improvement and broadening of the ion beam spot. Further experiments demonstrated the validity of SLAS and confirmed the precise position of the SLAS area for achieving the best elimination of redepositing residue. Microtrenches of 100 nm in width were fabricated with satisfying steep sidewalls and a 3∶1 aspectratio. Generalizing this in situ elimination of redeposition in the field of FIB sputtering would be effective.
Sep. 15, 2021Vol. 29 Issue 9 2108 (2021)
Bo-zhong GU, Meng CHEN, and Zhong-yu YUE
To meet the increasing demand of optical infrared telescopes and reduce the driving power, carbon fiber composite materials are used to carry out lightweight research on the main mirror truss of the telescope. The layout of carbon fiber composite truss element in the telescope's primary mirror chamber was optimized, and the evolution algorithm was used to select the optimal layout. The truss element of the telescope's primary mirror chamber was modeled, and the sensitivity analysis and evolution algorithm were used to select the best layup scheme. Three typical layup schemes were utilized for comparison. Static analysis and loading experiment are performed on the truss rod element. The six-bar triangular pyramid unit assembled by the rods is subjected to modal analysis and vibration test. The comparison of finite element analysis and experimental results show that the optimal layup plan is [±45°/90°/0°/90°/0°]s. The equivalent axial stiffness obtained by the finite element analysis of the truss bar element of this scheme is 8.306×106 N/m, and the experimental measurement is 7.463×106 N/m; the equivalent radial stiffness obtained by the finite element analysis is 3 968.3 N/m, and the experimental measurement is 3 344.5 N/m. The modal analysis of the six-bar triangular pyramid element of this scheme shows that the first-order frequency is 93.699 Hz, and the first-order frequency is 84.683 Hz measured by the vibration experiment. The weight of the composite truss rod is 77.6% lighter than the steel structure of the same size, static and dynamic properties are better than steel rods of the same weight. The results of finite element analysis and experimental verification of the best layup scheme indicate that its static and dynamic properties are better than other schemes.
Sep. 15, 2021Vol. 29 Issue 9 2116 (2021)
Xiao-bin HONG, Zheng-pan XU, Xin-yong WEI, Kun-cai ZHU, and Yuan-ming CHEN
Aiming at solving the dynamic collision avoidance problem for unmanned surface vehicle under complex marine status, this study constructs the obstacle model and the collision risk model to achieve the track re-planning of dynamic collision avoidance in complex sea conditions with the improved velocity obstacle method that introduced multiple constraints.Firstly, an obstacle model description method for rectangular bounding box was proposed for USV's geometric characteristics of large aspect ratio.A relative motion model of USV in hull coordinate system was established with the relative motion parameters calculated. Secondly,the collision risk was calculated to determine the time to start avoiding the obstacle.Lastly, improved obstacle avoidance path was constructed by introducing obstacle model constraints and characteristic constraints of USV’s autonomous local obstacle avoidance system based on velocity obstacle method. The track re-planning results were obtained through experiments.The simulated experiment on the physical simulation platform of V-REP (Virtual Robot Experimentation Platform) and the actual ship obstacle avoidance experiment show that the path re-planning time during collision avoidance is less than 15 s at a speed of 12 knots, meeting the dynamic collision avoidance requirements of unmanned surface vehicle under multiple constraints of actual navigation.
Sep. 15, 2021Vol. 29 Issue 9 2126 (2021)
Hai LI, Hong-guang JIA, and Zai-bin CHEN
Based on the Blade Element Momentum Theory (BEMT), the inflow distribution of the rotor of a coaxial rotor system was determined and the aerodynamic model for these coaxial rotors was established in this study. Next, the aerodynamic characteristics (thrust, torque and power consumption) of the coaxial rotor system were measured and verified by the designed test platform. To explore the optimal aerodynamic layout, the influence of varying the rotor spacing on the system performance in a hover at different rotor speeds was emphatically analyzed. The results show that varying the rotor spacing has no significant effect on the total thrust in the coaxial system, however, the lower rotor produces a smaller thrust than the upper rotor, which is approximately 43.8%-45.1% of the total thrust. In conclusion, improving the collective pitch and blade twist angles of the lower rotor aids in enhancing the aerodynamic performance in the coaxial rotor system. Moreover, the area of the actual wake boundary of the upper rotor is approximately 15% larger than that of the theoretical boundary as the lower rotor greatly restrains the contraction of the upper rotor's wake. In addition, the aerodynamic layout is optimal when the rotor spacing is 0.40R owing to the largest thrust produced by the lower rotor and the lowest net torque.
Sep. 15, 2021Vol. 29 Issue 9 2140 (2021)
Xu ZHANG, Lei-jie LAI, Peng-zhi LI, and Li-min ZHU
To overcome the problems of low damping resonance and different dynamics properties in the large-range compliant micro-positioning stage driven by a voice coil motor, a compound closed-loop frequency-domain inverse iterative learning control method based on data-driven frequency-domain inverse iterative feedforward compensation and PI feedback control with phase-lead compensation is used for high-speed and high-precision control. First, the micro-positioning stage with a double-parallelogram flexure mechanism driven by a voice coil motor is built, and a dynamics model is identified for different working positions. Then, a PI feedback controller with phase-lead compensation is designed to improve the relative stability of the positioning system. Input and output data are then used for online inverse estimation of the system frequency response function, which can be used as feedforward compensation to further eliminate the resonance effect. Finally, tracking experiments are conducted using the proposed control method, which is then compared with other methods. Experimental results show that the maximum tracking error for the triangular trajectory using the proposed control method is 0.175%. Compared with a PID control, phase-leading PI control, and transfer function inverse feedforward control, the root mean square errors of tracking are reduced by 8.75, 5.43, and 2.21 times, respectively, which can better meet the requirements of high tracking accuracy, fast speed, and strong anti-interference ability of large stroke micro/nano-positioning.
Sep. 15, 2021Vol. 29 Issue 9 2149 (2021)
Qin LUO, Xiao-yan SHEN, Dong-sheng LI, Jian-long Yin, and Jia-cheng Hu
To address problems that have long been unsolved in the energy utilization efficiency and energy efficiency evaluation of aerostatic lubrication technology, this study uses three types of aerostatic restrictors for CMM, to establish the theoretical model of energy efficiency evaluation and experimental analysis. First, starting from the gas state, the compression factor is introduced based on the pneumatic power to establish a compression energy model of the compressed air flowing into the throttle. Second, using the pressure and bearing capacity of the air film field, the air flotation work model is determined. Third, the energy efficiency theory is established from the two functional models. Finally, an energy efficiency test for the three throttles is conducted through multi-parameter tests. The test results show that all three types of restrictors have the best energy efficiency when the inner diameter of the intake pipe is 2 mm and the supply pressure is 0.3 MPa. Among them, the double U A-type with the largest working area can reach a maximum energy efficiency of 17.8%. In conclusion, the energy efficiency of the device is inversely related to the supply pressure and intake flow, and positively related to the bearing capacity. Furthermore, when other conditions are equal, the device with a greater working area exhibits a greater energy efficiency. This thesis research has vital reference value for the gas source configuration and overall design of aerostatic systems.
Sep. 15, 2021Vol. 29 Issue 9 2158 (2021)
Wei ZHANG, Zong-wang HAN, Xiang CHENG, Wei-bin RONG, and Hong-yu ZHENG
Straightness of shaft parts is an important criterion to judge whether a part passes quality control. To solve the problems of low efficiency and insufficient accuracy of traditional methods for measuring straightness, a platform for measuring the straightness of short shaft parts has been developed. A sharpness function based on eight neighborhood hollow gradient weighting is proposed for achieving autofocus. Using image preprocessing, morphological operations, and sub-pixel edge coordinate extraction, the central axis of each part is obtained using the radial local area search method. Next, a large-variation double-tangent cross genetic algorithm based on the minimum region method is proposed for measuring the straightness of the central axis. Four algorithms are integrated by the graphical user interface. Evaluation error using this algorithm is less than that obtained using the least squares method, the segmentation approximation method, or the minimum area method, consistent with the literature reports of results obtained using this algorithm. Finally more than 94% of the results are within 10 μm of the results obtained using a 3-axis measuring machine. This system can thus be used to measure the straightness error of short shaft parts.
Sep. 15, 2021Vol. 29 Issue 9 2168 (2021)
Yuan-yuan LUO, Jia YAO, Dong-shu LI, Xun-hua ZHU, Shu-li LI, Lian-qun ZHOU, and Zhen GUO
Conventional digital PCR detection only carries out end-point fluorescence analysis for nucleic acid samples after amplification. Based on fluorescence images obtained after reactions are completed, negative and positive statistics and sample concentrations are calculated. Analysis results are easily affected by false-positives and non-specific amplification. In this paper, a real-time high-throughput digital PCR chip analysis method based on process tracking has been proposed, to quantitatively analyze digital PCR results incorporating the dimension of time, thereby improving the accuracy of digital PCR detection. A system supporting real-time digital PCR analysis was designed and compared with an end-point digital PCR instrument to verify system performance. Using this system, different concentrations of Epstein-Barr virus were detected, and real-time amplification curves were obtained. Support Vector Machine algorithms were used to learn amplification curve characteristics, and applied to classify the detection curves. The amplification results of the designed real-time digital PCR system were highly consistent with that obtained by the end-point digital PCR. The classification algorithm based on Support Vector Machine can achieve more than 98% amplification curve classification accuracy and accurately identify false-positives and non-specific amplification micro-wells. Compared with the traditional threshold segmentation method, the average accuracy of this method for positive recognition is increased by 17.60%. The lower the copy number of the target template, the more obvious this effect is. Compared with traditional end-point digital PCR, data analysis based on the real-time digital PCR system proposed in this paper offers the advantage of higher accuracy. Quantitative result accuracy is especially improved in cases of low copy number detection.
Sep. 15, 2021Vol. 29 Issue 9 2178 (2021)
Ye-yan WEI, Xian-yong BAI, Zhi-yong ZHANG, Zhi-wei FENG, and Qian SONG
To meet the requirements of the solar mid-infrared spectral band CO 4.66-μm spectrum observations, a high-resolution mid-infrared spectrograph with a 4.667-μm central wavelength was designed. First, the technical indicators were studied based on the requirements of the scientific observations that have to be made. The entire spectrograph was put in a vacuum liquid-nitrogen refrigeration vessel to reduce the background radiation from the infrared equipment. An echelle is used in the spectrograph as a spectrum splitter to increase the observation resolution. The optical configuration of the spectrograph uses a creative structure by combining the Littrow structure and the Three-Mirror Anastigmatic (TMA) technology. Such a structure provides better imaging quality and optical path compression. In addition, the TMA structure has dual functions, as the collimating and imaging optical paths. The design and optimization methods of the coaxial three-mirror structure, TMA structure, and spectrograph structure were also studied based on the coaxial three-mirror system's geometrical optical imaging theory. The designed spectrograph has a size of less than 700 mm, a focal length of 1 300 mm, a numerical aperture of 0.035, and a field of view of 20.3'×0.158'. The imaging quality of the spectrograph system was evaluated, with results indicating that, within the working wavelength, the root-mean-square diameter of the spot diagram is less than 5 μm, and the energy focuses on one pixel. Therefore, the spectrograph meets the design requirements.
Sep. 15, 2021Vol. 29 Issue 9 2009 (2021)
Hai-bin WU, Kai-yang XU, Shuang YU, Ai-li WANG, Yu-ji IWAHORI, and Xiao-ming SUN
An augmented reality surgical navigation system allows the visualization of a superimposed display of virtual organs above the real surgical scene, making it convenient for doctors to perform surgery. This review covers the application of research into augmented reality technology in various surgical navigation systems in different clinical fields. Furthermore, in view of the fact that augmented reality technology provides an improved display for surgical navigation systems, this paper classifies and summarizes the intraoperative augmented reality display technology into three categories: video display technology, stereo display technology, and projection display technology. Additionally, the development, methods, and characteristics of projection distortion correction techniques for analytical and non-analytical surfaces are reviewed, with the aim to cover the key mechanisms of the most promising projection display technologies. Finally, the limitations and future scope of the projection display technology are prospected.
Sep. 15, 2021Vol. 29 Issue 9 2019 (2021)
Bin-bin LUO, Hong GU, Qing-ming LÜ, Ya-jie WANG, and Sheng-xi WU
This study proposed a graphene oxide (GO)-integrated excessively tilted fiber grating (ExTFG) local surface plasmon resonance (LSPR) immunosensor for the label-free and specific detection of the cancer biomarker programmed cell death-ligand 1 (PD-L1). First, large-sized (165 nm) gold nanoshells were used as LSPR carriers to be immobilized on the fiber surface; then, GO was coated on the fiber surface to improve the hydrophobic properties of the ExTFG-LSPR sensor to enhance the sensor's ability to adsorb biomolecular proteins. Finally, anti-PD-L1 monoclonal antibodies were covalently bound to the carboxyl terminal of the GO on the fiber surface for the specific detection of PD-L1. Experimental results showed that the detection range of the immunosensor for PD-L1 antigens in phosphate buffer is 0.038–38.46 pmol/L, exhibiting suitable linearity in the low concentration region of 0–2 pmol/L with a sensitivity of approximately 0.114 nm/(pmol·L-1). The detection limit of the immunosensor for the PD-L1 antigen dissolved in phosphate buffer is as low as approximately 0.076 pmol/L, and the dissociation coefficient is approximately 2.801×10-12 mol/L. When the immunosensor was used in clinical immunoassays with different healthy serum samples and hepatocellular carcinoma serum samples, its responses to the former were extremely weak but were noticeable toward the latter, indicating that it had suitable clinical specificity for PD-L1 in complex serum environments and thus showed potential for clinical application.
Sep. 15, 2021Vol. 29 Issue 9 2039 (2021)
Ying ZHOU, Yun-biao HUANG, Dong-ling LI, and Quan WEN
Scanning grating micromirror is a new generation core diffraction component of micro spectrometer. However,due to using of linear sensor which is too expensive in near infrared, the application of near infrared spectrum analysis technology is seriously restricted. In this paper, we present an electromagnetic scanning grating micromirror which is fabricated by Micro-Electro-Mechanical System(MEMS) technology. This device integrates with grating, driving actuator and angle sensor. It can replace array detectors with single detector. First, we design the theoretical model, and analyse the impact of main structural parameters such as beam size and mirror size on device performance. Based on these, the optimized design parameters for scanning grating micromirror are obtained. Subsequently, we fabricate this device by MEMS technology and test its performance. The experimental and theoretical results show that when the scanning angle is ±7o,the spectral range is 800-2 500 nm,the diffraction efficiency near the blazed wavelength is ≥70%, and the control precision of angle sensor is ≤ 0.05o, This result demonstrates that the using of our device in micro spectrometer is effective.
Sep. 15, 2021Vol. 29 Issue 9 2048 (2021)
Sheng-bo MU, Yang LI, He-fei LIU, and Chao YANG
A common baseline method was proposed to realize angle matching of multi-beams and the parallelism between the emission-receiving system with a complex structure. The emission and the receiving systems were aligned separately. They were fixed according to the baseline. The alignment method of the emission system was studied with a focus on the system with many beams, strict angle error between two beams, high magnification, and strict divergence angle requirements. First, according to the emission-receiving relationship of the structural design, the common baseline, which was the floor of the laser bracket, was built. The floor was the interface of the abutment of the emission and receiving systems. Subsequently, the effect of the expander lens, which could change the laser angle, was analyzed. The laser angle was aligned according to the result of the analysis. The long-focus and large-aperture collimator and the high-accuracy multi-beam-axis calibration system were used to test the direction of the laser and the divergence angle, and they aligned in place such that the angle of the laser beam matched the requirement and the error was less than 1'. Finally, the expander lens was abutted with the laser, according to the influence of the beam expander lens on divergence angle and the beam direction, the distance between the positive and negative lens groups was aligned, and the location of the expander was also aligned such that the divergence and beam angles matched the requirement. The error of the divergence angle is 5 μrad. The error of the angle between two beams is less than 5″. The test results show that the deviation of emissive angles is less than 5″ and the divergence angle is (0.042±0.01) mrad. The beam expansion ratio and final divergence angle matched the requirement. It had the conditions for abutting with the receiving system. The results show that the alignment method of the multi-beam laser emission system is of high precision and effective in practical applications.
Sep. 15, 2021Vol. 29 Issue 9 2058 (2021)
Jun WU, Yue-jie SHU, Shi-bao CAO, and Yu-hang QIU
To achieve high-precision, non-contact wave height measurements, a non-contact wave height measurement method based on laser-incoming spot recognition was proposed. First, the image geometry model of the wave height measurement device was constructed, and the primary parameter determination method of the wave height measurement device was studied. Then, according to the characteristics of the binary image of a laser in water, a laser-water entry feature template was constructed, and a dynamic laser spot tracking algorithm was proposed. Finally, according to the determined structural and image sensor parameters, an experimental device was constructed, the wave-height sensor was rated, and the wave simulated by the electric displacement platform was measured using the calibration curve. The experimental results show that the measured displacement is identical to the set displacement of the electric displacement platform, with a maximum error of only 0.65 mm, essentially meeting the high precision, non-contact, and high dynamic measurement requirements of hydro-physical model experiment waves.
Sep. 15, 2021Vol. 29 Issue 9 2065 (2021)
Jiang GUO, and Lin-guang LI
Neutrons are widely used in the microstructure inspection of materials and biological samples owing to their strong penetrating power. However, the intensity of the neutron beam is weaker than that of X-rays. A neutron-focusing mirror is usually employed to efficiently utilize a neutron beam. In this study, an ellipsoidal neutron-focusing mirror using a metal substrate was developed based on the high-performance manufacturing concept. Experiments on the focusing and small-angle neutron scattering (SANS) of the mirror were conducted. The results show that the maximum intensity of the focused neutron beam is 103 of the diffuse scattering intensities. A circular focusing spot with a size almost equivalent to that of one of the upstream pinholes was created. The experiment of focus was conducted away from the best focal plane. The beam profiles at several mirror-center-to-detector distances were obtained and the FWHM values of the beam profiles were in good agreement with the theoretical estimations based on the geometric optics. The wavelength distributions, such as the direct beam and the reflected beam were analyzed. The reflectivity of the neutron focusing mirror reaches 60%, and the peak intensity exceeded 1 000 counts/pixel (0.1 mm×0.1 mm). Moreover, a preliminary result for SANS using a standard sample made of porous silica (MCM-41) was reported. Studies have shown that the ellipsoidal neutron-focusing mirror has satisfactory focusing performance, which is sufficient for small-angle neutron scattering research.
Sep. 15, 2021Vol. 29 Issue 9 2075 (2021)
Jin NIU, Xi-ping XU, and Zhen-hao DUAN
A set of quantitative detection and evaluation systems were developed to measure and evaluate the dazzling effect of a non-lethal laser dazzler. The developed systems use non-biological quantitative testing methods, designing a target composed of a simulated human eye optical system, a retina simulator, and a simulated eyeball support device. Through it, the detection system can capture the original laser dazzling image using a human-like effect, combined with the CIE general disability glare equation of biological characteristics. After software processing, the bionic dazzling image can be comprehensively analyzed, and the dazzling effect can be obtained. For the level judgment, the spectral resolution of the system is 1 nm, the working band is 380–780 nm, the ambient light test range is 1×10-4–1×103 lx, and the testable maximum power density threshold is 2 mW/cm2. At present, the system has carried out numerous verification tests comparing the dazzling effect for volunteers and has been applied to the dazzling effect test of a series of police laser dazzlers. It has provided support for the selection of anti-terrorism anti-riot equipment, with several evaluation tests conducted. The verification tests and practical applications show that the system further solves the problem of using non-biological means to quantitatively test the physiological effects of laser dazzling and facilitates a scientific evaluation of the dazzling effect of non-lethal laser dazzling devices. The studies on the dazzling effect of the eyepiece provide an adequate experimental research base.
Sep. 15, 2021Vol. 29 Issue 9 2083 (2021)
Han SONG, Qi-hui CAI, Ming-yao LIU, Qi-dong WANG, Zi-jian CAI, and Yi LIU
The large specific surface area advantage of low-dimensional nanomaterials greatly improves the reaction efficiency between materials and environmental gas molecules, which plays a crucial role in improving the sensitivity and response speed of the key hydrogen-sensitive devices in fiber optic hydrogen sensors. In this paper, we describe a new method for the preparation of high-performance Au-Pd core-shell nanoparticle monolayer hydrogen-sensitive thin films by self-assembly at the oil-water interface as well as a transmission fiber hydrogen sensor based on the film. In the experiment, spherical Au nuclei with a particle size of approximately 12 nm were prepared via a hydrothermal synthesis method. A Pd growth liquid was then added to the aqueous solution of Au nuclei to obtain Au-Pd core-shell nanoparticles with a particle size of approximately 22 nm. The Au-Pd core-shell nanoparticles were modified by octadecylamine and transferred to a toluene solution using phase transfer technology. Finally, nanoparticle monolayer hydrogen-sensitive films with high coverage and fewer voids were prepared by pulling at the toluene-water interface. Characterization analysis results showed that the size of the Au-Pd core-shell nanoparticles formed was uniform with outstanding crystallinity, and the density coverage rate of the prepared nanoparticle monolayer film was 87%. A transmission fiber optic hydrogen apparatus was built to characterize the hydrogen response characteristics of the prepared Au-Pd core-shell nanoparticle monolayer at different hydrogen concentrations. The experimental results show that the nanoparticle monolayer hydrogen-sensitive thin film exhibits good stability in a number of cycle tests with high hydrogen response speeds (3 s to 4% of hydrogen and 13 s to 0.1% of hydrogen). The method of preparation of the sensor for rapid and accurate detection of low concentration of hydrogen has a good application prospect.
Sep. 15, 2021Vol. 29 Issue 9 2092 (2021)
© Copyright 2018-2021 | Chinese Laser Press.
All Rights Reserved 沪ICP备15018463号-20