








Please enter the answer below before you can view the full text.


2024
Volume: 19 Issue 2
30 Article(s)

Zhilong DING, Peng WANG, Yonggang WANG, and Boqun SU
ObjectivesIt is difficult to control the drum water level of a supercharged boiler due to the strong load disturbance in the sailing process. In order to ensure the stability of the drum water level, it is necessary to study drum water level control methods under strong load disturbance. To this end, this paper proposes a sliding mode controller with an improved adaptive genetic algorithm (AGA). MethodsThe velocity and accelerated speed of the drum water level error is combined with an S-function to design a sliding mode controller. Its stability is then proven using the Lyapunov stability theorem. On this basis, the sliding mode controller parameters are optimized with the improved AGA. ResultsThe control performance of the sliding mode controller with improved AGA is compared with that of a PID controller. In response to ramp disturbance signals and step disturbance signals, the sliding mode controller with improved AGA can track the input signal without error. Its stability time is 5 s shorter than that of the PID and its overshoot is lower than that of the PID. ConclusionsThe simulation results show that the sliding mode controller with improved AGA is superior to the PID controller.
Feb. 28, 2024Vol. 19 Issue 2 181 (2024)
Shoutai SUN, Bing TANG, Yali XUE, and Li SUN
ObjectiveIn order to improve the safe and stable operation level of compressor equipment, this paper puts forward a rapid diagnosis method of surge states based on hybrid deep learning parameter identification, and proposes an active disturbance rejection control (ADRC) strategy to realize compressor anti-surge. MethodFirst, a long-short-term memory neural network (LSTM) is used to process the time series relationship of the input and output data for compressor parameter identification; the interval probability estimation ability of Gaussian process regression (GPR) is integrated; a combination of LSTM and GPR (LSTM-GPR) is proposed; and a hybrid deep learning parameter identification algorithm is used to realize the rapid diagnosis of the compressor surge state. Then, based on the ADRC method, the parameters of the compressor's throttle valve are controlled, and the accurate control of the surge state of the compressor is realized through the compensation of the throttle valve parameters by the control amount. ResultsThe results show that the hybrid deep learning parameter identification algorithm can accurately identify the critical Greitzer parameters of the compressor and quickly and accurately judge whether it is in a surge state, and the ADRC-based control strategy can effectively allow the compressor to exit the surge state, which is faster and more effective than traditional PID control and nonlinear feedback control without losing the working range of the compressor. ConclusionThe proposed parameter identification and ADRC method can be applied to the surge diagnosis and active control of compressors to improve their safety and stability.
Feb. 28, 2024Vol. 19 Issue 2 187 (2024)
Zhuoyuan CHEN, Shaojuan GENG, Shuaipeng LIU, Jiahao LIU, and Hailong LIU
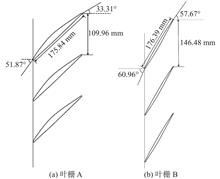
ObjectivesThis study seeks to evaluate the effects of profile variability on the aerodynamic per-formance of a compressor and provide guidance for the robust design of compressor blades. MethodsA mathematical model of profile variability distribution with a single peak is established. The effects of the combined profile variability of the blade pressure and suction surface on the aerodynamic performance of two supersonic planar cascades are then investigated by numerical simulation. ResultsThe results show that the profile variability distribution on the suction surface is the key factor behind cascade total pressure loss. The total pressure loss coefficient decreases gradually with the position of maximum profile variability on the suction surface moving downstream. The profile variability distribution on the blade pressure and suction surface influences the flow turning angle and static pressure rise coefficient with opposite trends. The profile variability on the suction surface plays a dominant role in the flow turning angle and static pressure rise of cascade with lower incoming Mach number; for cascade with higher incoming Mach number, the profile variability on the pressure surface has a significant impact on the flow turning angle and static pressure rise. The position and intensity of the shockwave and the end wall profile of the expansion channel after the shockwave comprehensively determine the flow state on the blade surface and in the cascade blade passage. The flow loss near the blade suction surface increases, the flow loss near the blade pressure surface decreases, and the compound effect determines the change of cascade loss, flow turning angle and static pressure rise. ConclusionsThe results of this study can provide guidance for the design, manufacture and manufacturing variability evaluation of transonic compressors.
Feb. 28, 2024Vol. 19 Issue 2 197 (2024)
Wan XU, Shitao ZHANG, Ruidong XIA, and Song LIU
ObjectiveIn order to tackle the challenges of low reliability, weak risk resistance and limited real-time performance in existing centralized control architectures for active vibration isolation systems, and considering the current state of research on vibration systems and edge computing, this study proposes a distributed control architecture for large-scale shipborne active vibration isolation systems based on edge computing.MethodsFirst, the traits of the centralized and distributed control approaches are analyzed. Second, the entire architecture of the control system is studied, leading to the design of its hierarchical structure and overall layout, which is partitioned into three levels: cloud, edge and end. The architectural design and interconnections of each level are expounded upon in detail. Finally, an experimental platform is created, and the system's reliability and real-time performance are evaluated through testing.ResultsThe experimental results indicate that the designed system architecture continues to operate normally under sudden circumstances, demonstrating stability and reliability. Moreover, the clock synchronization deviation is reduced to 1 microsecond, enhancing the system's real-time performance.ConclusionThe system architecture is rationally and efficiently designed, effectively enhancing the reliability, risk resistance and real-time performance of the vibration isolation system
Feb. 28, 2024Vol. 19 Issue 2 207 (2024)
Tieli LI, Wenshuang WANG, Haiyang LIU, Yuansong YANG, and Yan LIN
ObjectiveThe artificial bee colony (ABC) algorithm has such characteristics as few control parameters, strong local optimization ability and fast convergence speed. However, when solving path optimization problems, it can easily fall into local optimal solutions. In order to solve the problem of pipeline routing in a ship pipeline system, an improved artificial bee colony (IABC) algorithm is proposed. MethodBased on the traditional artificial bee colony algorithm, the crossover operation of genetic operators is introduced into the update mechanism of following bees, and an adaptive strategy is adopted for the crossover probability of the crossover operator. The crossover operation on the population is used to find new solutions in the global range. The way scout bees search for new paths is improved from updating the points that the path passes to updating the "road sections" in the path. This paper proposes an artificial bee colony co-evolution algorithm for solving the optimization of branch pipeline paths. ResultsCompared with the standard artificial bee colony algorithm, the improved algorithm can improve the path layout effect by 32.3%–37.4% and the convergence speed by 17.7%–29.9%. ConclusionThe improved artificial bee colony algorithm proposed herein has higher solution quality, faster convergence speed and better stability than the traditional artificial bee colony algorithm for a single pipe or branch pipe.
Feb. 28, 2024Vol. 19 Issue 2 1 (2024)
Yiming ZHONG, Caoyang YU, Junjun CAO, Baoheng YAO, and Lian LIAN
ObjectivesAiming at the challenge of accurate diving modeling of a smart float, an anti-saturation and noise least squares (ASNLS) algorithm is proposed in this paper to achieve diving multi-parameter identification and depth prediction. MethodsFirstly, the nonlinear motion characteristics of the smart float actuator were included in the gray box-based diving model to better fit the actual model, and the continuous diving motion equation was transformed into a discrete form to match the real-world discrete data sampling. Subsequently, the aforementioned discrete diving model was constructed into a correlation form to attenuate the influence of data noise. Finally, by adjusting the values of the covariance matrix, the designed diving parameter identification algorithm achieved resistance to data saturation. ResultsBased on the data of the South China Sea deep diving experiment of the smart float in 2021, diving model parameter identification and depth prediction are carried out. The results demonstrate that the ASNLS algorithm has faster convergence speed (31.8% higher than the least squares algorithm) and smaller depth prediction error (average absolute percentage errors less than 9% at different depths) than both the traditional least squares algorithm and supports the vector machine algorithm.ConclusionsConsequently, the ASNLS algorithm can provide effective support for the depth control and prediction of the smart float.
Feb. 28, 2024Vol. 19 Issue 2 13 (2024)
Zongpeng WANG, Bingwen LIU, Yanxu BAO, Wei CHEN, Guoqiang TANG, and Xiaobin LI
ObjectivesTo investigate the near-wall rotating cylindrical wake and hydrodynamic characteristics, flow around cylinder at typical gap ratios is investigated. MethodsA numerical simulation of flow around a near-wall rotating cylinder with different gap ratios (G/D = 0.2, 0.8, 1.4) and rotation rates at Reynolds number$Re = 200$ was carried out to compare the cylindrical wake and hydrodynamic characteristics at different gap ratios and rotation rates. ResultsThe results show that: For $G/D = 0.2$, the cylindrical vortex shedding is significantly suppressed and the lift and drag force on the cylindrical surface remain steady. For $G/D = 0.8$ and $G/D = 1.4$, at low rotation rates, the "wake vortex" is shed and is similar to the 2S pattern, with sinusoidal periodic fluctuations in the lift and drag coefficients and small amplitude; at higher positive rotation rates, the cylindrical wake pattern is the stable D pattern with no vortex shedding (changing from D+ to D- pattern as the rotation rate increases), the "wake vortex layer" is separated from the "wall vortex layer", the "wall vortex" is shed multi-periodically, the lift and drag coefficients are fluctuating multi-periodically and the amplitude is increasing significantly; at higher reverse rotation rates, the cylindrical surface is wrapped by a positive boundary layer, with no vortex shedding and no fluctuations in lift and drag. ConclusionsThe results can provide a reference for the development of high efficient flow control technology.
Feb. 28, 2024Vol. 19 Issue 2 21 (2024)
Songzi GUO, and Zhiyin LI
ObjectivesThis paper investigates the influence of the span-wise stiffness of a flapping pectoral fin on its generated thrust. MethodsA scheme to fabricate a flexible pectoral fin with uniform span-wise stiffness is introduced. A series of experiments is then conducted to investigate the generated thrust and lateral force of the fabricated pectoral fin with different degrees of span-wise stiffness in the frequency range of 0.3-1.0 Hz. Combined with collected shots by a high speed camera, the impact of span-wise stiffness on generated force is analyzed. Results The experimental results show that the average propulsion force and the average lateral force generated by the flexible bionic pectoral fins are related to the size and distribution of the radial stiffness of the fin in the range of the tested flap frequency. By optimizing the spreadal stiffness of the flexible bionic pectoral fin of the robotic fish prototype (XJmanta), the maximum swimming speed can be increased by about 45%.ConclusionsThe results of this study can be used to guide the design of flapping flexible bionic pectoral fins and optimize the hydrodynamic performance of ray-like underwater robots.
Feb. 28, 2024Vol. 19 Issue 2 31 (2024)
Yang MIAO, Shaoxiong FENG, Daiyang YE, Zhiyong PEI, and Lei ZHANG
Objective At present, the oil companies international marine forum (OCIMF) rules are frequently used to calculate wind load for large tankers and the American petroleum institute (API) rules for offshore platforms. However, due to the complexity of floating production storage and offloading (FPSO) superstructures, whether these two sets of rules can be applied to the wind load calculation of FPSO requires further study.MethodsThis paper establishes a numerical model of a 300 000-ton class FPSO with a universal superstructure. The wind load on the FPSO under severe sea conditions and different wind angles is calculated and compared to the results of the rules. The shielding effect and heeling angle of the FPSO are analyzed. ResultsThe maximum heeling moment and wind load under an upright floating attitude appear at a 270° wind angle. The heeling moment and wind load under a heeling floating attitude are greater than those under an upright floating attitude, and the maximum heeling moment appears at a 10.5° heeling angle and a 280° wind angle. The results of the API and OCIMF rules show big differences compared with CFD: the differences between their results at a 270° wind angle and CFD are 13.6% and 24.5% respectively. Conclusion The flow field details obtained by numerical simulation are conducive to analyzing the shielding effect between superstructures and enhancing the accuracy of ship wind load prediction, thereby providing valuable references for the stability design of FPSO.
Feb. 28, 2024Vol. 19 Issue 2 37 (2024)
Zhiqiang YAO, Weiguo WU, and Yongshui LIN
ObjectiveThis paper aims to study the wind-induced noise of typical rods in the open areas of cruise ships. MethodsThe numerical simulation of aerodynamic noise and wind-induced vibration noise is carried out using computational fluid dynamics (CFD) combined with the acoustic analogy method and vibro-acoustic coupling method in order to explore the generation mechanisms and characteristics of the two kinds of noise. Results Under different wind speeds, the maximum frequency of aerodynamic noise is dominated by the vortex shedding frequency, while the maximum frequency of wind-induced vibration noise is dominated by the natural frequency of the structure. The aerodynamic noise of three different cross-section rods is generally greater than that of wind-induced vibration noise, and the aerodynamic noise of square rods is the greatest. Under large flexibility, when the fluctuating pressure frequency of the rod is close to the natural frequency, the wind-induced vibration noise will be close to or even exceed the aerodynamic noise. ConclusionsIn the design of typical rods to be applied in the open areas of cruise ships, in order to reduce wind-induced noise, circular rods should be selected, square rods should be avoided, reasonable rod sizes should be selected and the vortex shedding frequency of the rods should not be close to the natural frequency.
Feb. 28, 2024Vol. 19 Issue 2 45 (2024)
Jiayu HUANG, Li ZHOU, Renwei LIU, and Shifeng DING
ObjectiveIn order to study the distribution of ship ice pressure during the interaction between an icebreaker and pack ice, a numerical simulation analysis is carried out for polar ships in pack ice channels. MethodThe discrete element method (DEM) is used to model the ship and pack ice. It is assumed that the pack ice is composed of an ideal two-dimensional disc, and the effects of the ocean current on the buoyancy, drag and additional mass of the pack ice are taken into account. The numerical model is validated by comparison with the experimental results of an MT Uikku model, and the effects of different speeds and ice conditions on the ship ice pressure in the pack ice area are analyzed. ResultsThe results show that the ice load is mainly concentrated on the bow of the ship when it moves in the pack ice channel. The ice pressure in the bow area increases with the increase in ice thickness, speed and the density of pack ice, among which ice thickness is the most important factor affecting the amplitude of the ice pressure. The ice pressure in the pack ice area has the greatest influence on the ice pressure in the bow area, and the ice pressure in the bow transition area has a significant effect. ConclusionThe numerical analysis method can provide certain references for the safe navigation and structural design of polar ships.
Feb. 28, 2024Vol. 19 Issue 2 53 (2024)
Jingjing LIU, Haiyan WU, and Long YU
ObjectivesIn the context of global carbon reduction, in order to meet the environmental require-ments of the design and construction of polar ships, this paper studies the impact of brash ice on the optimal design of polar expedition cruise ships when navigating across oceans and designs the most optimal energy-saving hull lines. MethodsIn view of the transoceanic characteristics of polar expedition cruise ships, the navigation region-based weighting method is used to quantify the evaluation and analyze the impact of brash ice on resistance and propulsion efficiency. An analysis is carried out of the performance of the propeller in broken ice channel through the coupling calculation of the computational fluid dynamics-discrete element method (CFD-DEM), an optimization model with the goal of combined self-propulsion power is established, and optimization calculations are performed for the parametric model of the whole ship at the designed speed.ResultsThe calculation results show that the optimized ship hull meets the requirements of displacement and effectively reduces navigation power in open water and broken ice channel with a combined self-propulsion power reduction of 9.71%.ConclusionsThe results of this study verify the feasibility and rationality of optimization based on the weighting method, and can provide references for the optimization design of hull form and thrusters of polar expedition cruise ships.
Feb. 28, 2024Vol. 19 Issue 2 62 (2024)
Kun TAN, Tao GUO, Chengguo SONG, Yang MIAO, Xiumin CHU, Weiguo WU, and Lei ZHANG
ObjectiveIn order to improve the safety of ship navigation, this study focuses on virtually aided ship navigation strategies.MethodsTwo different inland river routes are chosen for the simulation of virtually aided ship navigation models based on the fluid-structure interaction mechanism, while taking the navigation rules and flow details of the rivers into consideration. The simulation of the ship sailing process on a typical inland river route under specific current conditions provides the corresponding virtually aided navigation plan in which the ship's velocity, location and course are obtained in a timely manner. ResultsIt is found that the simulation method established on the basis of Fluent can be used to solve the problems of multi-degree-of-freedom motion and fluid-structure interaction. When sailing through bends or branches, steering with a small rudder angle over long distances ensures safe navigation and prevents speed reduction and significant lateral displacement.ConclusionThe proposed method can be effectively combined with the flow field information of digital channels to simulate the ship sailing process, thereby providing data support for the decision-making of intelligent navigation on inland river routes.
Feb. 28, 2024Vol. 19 Issue 2 71 (2024)
Chao LI, Zifeng SHI, Chengke ZHANG, Yanhui AI, and Huqing SHE
ObjectiveThis study aims to improve the response speed and efficiency of rudders, and meet the depth-keeping and attitude control requirements of near-surface vehicles under static water and wave disturbances.MethodsAn improved S-plane control algorithm with faster convergence speed is proposed on the basis of the S-plane algorithm. It is then combined with expert intelligent control to establish a hybrid model and controller of a closed-loop expert control-improved S-plane algorithm. The differences between the PID algorithm, S-plane algorithm, improved S-plane algorithm and expert control-improved S-plane algorithm in the navigational depth and attitude control of near-surface navigators are compared and analyzed, and motion prediction under wave disturbance is completed. ResultsThe improved S-plane algorithm can improve the convergence speed in still water and reduce the pitch amplitude under wave disturbance, while the expert control-improved S-plane algorithm can improve the rudder control efficiency. In still water, the navigator state can be quickly and stably transitioned, and in waves, the heave and pitch amplitudes of the near-surface navigator are effectively reduced by more than 30%.ConclusionThe expert control-improved S-surface algorithm proposed herein has good applicability for the improvement of near-surface vehicle motion stability.
Feb. 28, 2024Vol. 19 Issue 2 81 (2024)
Zhiyuan WANG, Tao YU, Leiming JING, Bencheng LIN, Aimin ZHOU, Wenjun LENG, and Cong LIU
ObjectiveThis study focuses on the deposition characteristics of oil mist on metal and fabric surfaces in ship cabin. MethodsOil mist is released in an experimental cabin and allowed to deposit on the target surfaces. The mass difference before and after deposition on the surfaces is weighed to determine the deposition mass, and the oil mist deposition characteristics of surfaces with different orientations and materials are compared. The deposition on the horizontal downward surface is reasonably assumed to be gas phase deposition. Its contribution is then estimated and the particle phase deposition velocity is calculated. ResultsThe deposition mass on the horizontal upward surface of the metal is 3.98 times and 4.66 times greater than that on the vertical surface and horizontal downward surface. For fabric surfaces, the deposition mass on the horizontal upward surface is 1.08 times and 1.20 times greater than that of the vertical surface and horizontal downward surface. For material comparison, the deposition mass on the horizontal upward, vertical and horizontal downward surfaces of the fabric is 49.1 times, 169.8 times and 155.5 times greater than that of the metal surface facing in the same direction respectively. Estimates show that the contribution of phase deposition to the metal horizontal and vertical surfaces are 21.5% and 79.2% respectively. The contribution of phase deposition to the fabric surfaces is about 90%. ConclusionsThe oil mist deposition on fabric surfaces is much stronger than that on metal surfaces. The deposition on the metal horizontal upward surface is much greater than that on the vertical surface and horizontal downward surface. The deposition differences between the fabric surfaces in the three orientations are not significant. Regardless of orientation or material, gas phase deposition cannot be ignored as it plays a dominant role in ship cabin environments.
Feb. 28, 2024Vol. 19 Issue 2 90 (2024)
Junze WANG, Pan ZHANG, Jun LIU, and Yuansheng CHENG
ObjectivesIn order to solve the difficulties of numerous design parameters and time-consuming computation of ship cabin structure optimization, a collaborative optimization method of surrogate model for cabin structure based on sub-model decomposition is proposed. MethodsA grillage was selected at a time, and the sub-model of grillage structure was established based on the finite element model of the current cabin scheme. The surrogate model was constructed for the grillage structure response and optimized based on the sub-model. After the optimization solution of the grillage was obtained, the cabin model was updated, and then the next grillage was optimized. This iteration stopped until one or more rounds of collaborative optimization including all grillages were completed. Finally, a small scale of adjustment of cabin structure size was conducted to obtain the final optimization solution. ResultsThe optimization result of a ship cabin structure shows that, compared with the cabin structure optimization method based on the dimensionality reduction surrogate model from the point of view of overall optimization, under the equivalent computational cost, the weight in the optimization result of the proposed method is further reduced by 2.86%, and the structural weight is reduced by 4.96% eventually. Conclusions The proposed method has better optimization result and better application value on the structure optimization problem of high-dimensional ship hull.
Feb. 28, 2024Vol. 19 Issue 2 98 (2024)
Qian CHEN, Shaoyu XIAO, and Guanjun ZHANG
ObjectiveTo address the issue of nonlinear stiffness changes in isolation systems with limiters under impact excitation, an impact dynamics theoretical model and its anti-impact performance research are conducted.MethodsFirst, using the idea of segmented linear equivalence, an impact dynamics theoretical model of a bidirectional limited single-layer vibration isolation system with a segmented linear stiffness limiter is established. The theoretical model is then solved using the analytical method and compared with the impact response of the finite element method under different impact conditions.ResultsThe analytical solution of the dynamic theoretical model is highly consistent with the finite element numerical solution under different impact conditions.ConclusionThrough comparative analysis, the accuracy of the impact dynamics theoretical model and solution method of the bidirectional limited single-layer vibration isolation system with segmented linear stiffness limiter is verified, providing a theoretical basis for research on the working principle and performance characteristics of vibration isolation systems with limiters.
Feb. 28, 2024Vol. 19 Issue 2 107 (2024)
Fukang CHEN, Jun YANG, Yuchao YUAN, Hongxiang XUE, and Wenyong TANG
Objectives In order to identify the change in structural strength after an interaction between hull girders and ice, this paper puts forward an analytical technique which can determine the structural strength of hull girders after an ice riding accident and disclose the related structural strength features. MethodsFirst, the hull girder structural strength analysis model and associated load analysis model are constructed in accor-dance with the characteristics of each section. To account for the buoyancy variations brought on by ice riding, the buoyancy distribution of the ice riding conditions is retrieved from the load analysis model and inserted into the structural strength analysis model. Gravity and the reaction force of the ice are then used to determine the structural strength. Finally, an analysis is carried out on the impact of lifting position and height on the buoyancy, shear force, bending moment and local stress distribution of the hull girders. ResultsThe re-sults show that the sites of buoyancy and shear force of the hull girders are situated in the stern part and middle part, and unaffected by changes in the bow lifting height. The shell is closer to the vertical when the lifting position is at the bow of the bulbous bow, making it harder to resist the ice lever support reaction and resulting in the high stress areas becoming comparably larger and more dangerous. ConclusionsThe proposed technique has high computation efficiency and can be used to estimate how hull girders will respond to a signi-ficant bow lift and make preliminary judgments on hull girder construction strength under risky ice riding conditions.
Feb. 28, 2024Vol. 19 Issue 2 113 (2024)
Huwei CUI, Runwen HU, and Qiyin DING
ObjectivesTo fully consider intact initial imperfections, including welding initial deformation and residual stress, it is necessary to conduct a study on the plastic deformation distribution and ultimate strength of a box girder under different cyclic bending moments. MethodsFirst, an isotropic material model and the Chaboche material model are chosen. Using the Python language, programs are developed to directly apply the initial deformation in finite element software. Subsequently, ABAQUS software is employed to conduct nonlinear finite element numerical simulations of the ultimate strength of a box girder under different cyclic bending moment patterns. The analysis considers the influence of welding initial deformation, residual stress, material hardening and the Bauschinger effect. ResultsThe results show that under unidirectional cyclic bending moments, the bending stiffness and ultimate strength of the box girder decrease continuously as the number of cycles increases. The plastic deformation extends from the upper deck of the box girder to the side plate region. The plastic distribution region of the box girder with welding initial deformation and residual stress is wider in the ultimate state. Compared to a single loading and considering only the initial deformation, after three bidirectional cycles, the ultimate strength of the box girder decreases by 10.44% to 15.15%. Considering intact initial imperfections, the ultimate strength decreases by 8.41% to 14.50%. ConclusionsThe ultimate strength of a box girder considering intact initial imperfections under different cyclic bending moments decreases more moderately. The obtained results can serve as a reference for the study of the ultimate strength of box girders under different cyclic bending moments.
Feb. 28, 2024Vol. 19 Issue 2 120 (2024)
Ange LU, Zitang WANG, Xiangshao KONG, Ying LI, Sangui CHEN, and Weiguo WU
ObjectivesAlthough the fluid-structure interaction calculation method can better simulate the ship collision process, it requires a longer calculation time. To address this problem, a simplified numerical calculation method is proposed. MethodsThe local cabin section of a ship is taken as the object to carry out water collision experiments under various operating conditions. Force sensors and non-contact measurement based on high-speed photography technology are used to obtain the collision force and motion time history data of the ship. The collision contact force and acceleration response data are then analyzed, and arbitrary Lagrange-Euler (ALE) coupled fluid-solid numerical computational analysis is carried out on the experimental process. The effect of the water on the impacting ship in the collision process is then simplified to the equivalent mass, and the effect on the impacted ship is simplified to the equivalent resistance, which acts on the non-impacting side of the impacted ship in the form of surface force to hinder the movement of the impacted ship. Numerical calculations that do not involve the water-structure coupling process are then carried out on the basis of the simplified method. ResultsThe results show that the errors between the peak collision force and the experimental values for each condition obtained by the simplified calculation method are within 5%, and the calculation time required by this method is much smaller than that of the ALE fluid-structure interaction algorithm ConclusionsThe proposed simplified numerical calculation method can provide useful references for realizing the efficient calculation of ship structure collision response.
Feb. 28, 2024Vol. 19 Issue 2 128 (2024)
Xue QU, Kai ZHENG, Luyao ZOU, and Jian ZOU
ObjectivesWhen a large-bow naval ship encounters adverse sea conditions, bow flare slamming causes a hull girder whipping response which threatens the security of global longitudinal strength. The whipping bending moment resulting from slamming is related to the level of hull stiffness and bow flare shape. However, there are great differences in the structural arrangement and profile of different ship types, so it is necessary to carry out whipping response analysis.MethodsFirst, the COMPASS-WALCS-NE nonlinear time-domain hydro-elastic method is used to predict the hull girder response, and the results are compared and verified through a self-running subsection model test. Next, based on the obtained time histories of the resultant bow impact force, ship motion posture at typical moments and global load response of hull girders, the phase difference of high-and low-frequency components in the waveloads is analyzed, and the correlation between the midship's slamming moment and resultant bow flare slamming force is studied. Finally, the sensitivity analysis of the main design parameters affecting vertical bending moment is carried out.ResultsIn the designed sea conditions, the resultant slamming force has two peaks during bow water entry which correspond to the processes of bottom impact and bow flare impact respectively. The whipping bending moment is mainly caused by bow flare impact, but as the impact area is large and the resultant force far away from the midship, the slamming moment is at the same level as the wave bending moment. The slamming moment is very sensitive to changes in wave height.Conclusions The results of this study indicate that the effect of whipping impact resulting from slamming should be considered in the global longitudinal strength evaluation of large-bow naval ships; among them, the sagging vertical bending moment needs to be directly superimposed on the still water bending moment component and low-frequency wave load component, while the hogging vertical bending moment should be reduced to a certain extent and then superimposed considering dam-ping dissipation.
Feb. 28, 2024Vol. 19 Issue 2 140 (2024)
Hantao ZHANG, Yiwen WANG, Xiangshao KONG, Cheng ZHENG, and Weiguo WU
ObjectiveThis paper investigates the coupling effect of ship nonlinear wave load and transient high-amplitude slamming load in view of the whipping response of ships under extreme sea conditions. MethodsA two-way computational fluid dynamics-finite element method (CFD-FEM) fluid-structure interaction method is used to carry out the numerical simulation of an S175 container ship, and the results are compared with the test results and 2D linear strip theory. The testing of a segmented ship model with a variable cross-section elastic backbone is carried out, and the analysis of the bow's slamming load and high-frequency nonlinear whipping characteristics is undertaken based on the two-way CFD-FEM fluid-structure interaction method. The results are then verified through comparison with the model test. ResultsThe influence of wave slamming load on the whipping response of the bow cannot be ignored. The second order high-frequency component induced by whipping accounts for 59.86% of the low-frequency wave bending moment in sea state 6. ConclusionsThe proposed two-way CFD-FEM fluid-structure interaction method can calculate the whipping response accurately. The nonlinear wave-induced load and dynamic structural response of the ship under extreme sea conditions are affected by the transient slamming load of the bow. In conclusion, the high-frequency whipping response should be taken into consideration in the safety design and assessment stages of ship structures.
Feb. 28, 2024Vol. 19 Issue 2 148 (2024)
Chunbo ZHEN, Zian TIAN, Yuchen LIU, Shizhu XING, and Shewen LIU
ObjectivesThis paper focuses on parametric modeling of a typical butt joint and establishes a finite element model with uncertain geometry of the weld seam, aiming to investigate the stress concentration factor Kt at the weld toe of the butt joint with uncertain weld seam geometry and analyze its distribution characteristics.MethodsFirstly, the mesh size and element type used in the past were improved, and the influence of different types of elements and mesh sizes on Kt is studied through finite element mesh sensitivity analysis. Nodal stresses are extracted along the welding direction of the butt joint, and the location of maximum stress concentration at the weld toe is determined by plotting the stress distribution. Then, the uncertainty of the weld seam geometry is accurately reflected by introducing control points to describe the variation of the weld seam geometry. Combined with the distribution pattern of the actual measured weld seam geometry data, a large amount of weld seam geometry parameter data are randomly sampled. Finally, Kt is calculated based on the notch stress method and its distribution was statistically analyzed to explore the distribution pattern of Kt when there is uncertainty in the weld seam geometry parameters of the butt joint. ResultsThe results show that the distribution of Kt follows a normal distribution. ConclusionsExploring the stress distribution of welding toes has great significance for analyzing fatigue strength and improving the prediction accuracy of fatigue life.
Feb. 28, 2024Vol. 19 Issue 2 159 (2024)
Zhuangzhuang ZHAO, Jun YANG, Gang LIU, Zhengjun HAN, and Hongqi YANG
ObjectiveIn view of the failure of type-I steel sandwich plate interfaces, this paper analyzes their interface fatigue debonding characteristics. MethodsBased on the cohesive force model and considering the time history, damage evolution equations and convergence criteria of 3D structural nodes with multiple degrees of freedom, an interface fatigue debonding simulation program suitable for 3D complex structures is developed. The accuracy of the developed program is verified through a comparison with the experimental results of welding joint debonding, and the interface fatigue debonding behavior of type-I steel sandwich plates is simulated numerically. ResultsThe results show that the maximum simulation error between the 3D interface fatigue debonding test and debonding experimentis only 14.05%. When an type-I sandwich plate is subjected to out-of-plane load, the debonding failure at the interface mainly manifests as surface crack propagation in the direction of the extended weld. When the crack propagation reaches about 70% of the length of the plate, the crack begins to penetrate through the web to form a penetrating crack.ConclusionThe interface fatigue debonding program developed herein can effectively evaluate the interface fatigue debonding life of type-I steel sandwich plates, giving it certain guiding significance for practical engineering applications.
Feb. 28, 2024Vol. 19 Issue 2 165 (2024)
Junzhi WU, Wenzhuo WANG, Xinhua YANG, Lechun DENG, and Qiang CHEN
ObjectiveThis study focuses on the preparation and properties of high-performance electromagnetic shielding materials for electronic equipment in marine environments. MethodsThe surface morphology, phase composition, electrical conductivity and ferromagnetic properties of the original ferrosilicochrome powder (FeSiCr) and silver-coated powder (FeSiCr@Ag) are analyzed with a scanning electron microscope, X-ray diffractometer, four probes and vibrating sample magnetometer, and a vector network analyzer is used to test the S parameters of the samples. A salt spray test chamber is used to simulate the corrosion behavior of the coating under marine environment conditions and observe its macro and micro morphology. Meanwhile, an electrochemical workstation is used to monitor the corrosion behavior of the coating in a mass fraction of 3.5% NaCl solution and study its corrosion mechanism. ResultsThe results show that the silver plating layer is compact and complete with the increase of the silver nitrate (AgNO3) addition. After electroless silver plating, the conductivity can reach 586.79 S/cm and the X-band shielding efficiency reaches 80 dB. After 96 h of accelerated corrosion in a humid heat and high salt spray environment, the surface of the resin coating prepared by FeSiCr@Ag shows no corrosion phenomenon. The self-corrosion potential of the coating before and after electroless silver plating is -0.4 V and -0.09 V respectively, indicating that the penetration rate of the corrosive medium into the coating slows down after silver plating, and a good corrosion inhibition effect is achieved.ConclusionsThe modified FeSiCr@Ag material has highly efficient electromagnetic shielding performance and good corrosion resistance properties.
Feb. 28, 2024Vol. 19 Issue 2 173 (2024)
Xian DING, Hongwei BIAN, Rongying WANG, and Heng MA
The trajectory generator is an important tool for the algorithm research and simulation verification of inertial navigation systems and their integrated navigation systems. By exploring and analyzing the research status of trajectory generators in different carriers, the design methods and main ideas of the ideal, numerical algorithm and mathematical model trajectory generators are outlined, and the research focuses are summarized. The three types of trajectory generators are then simulated and compared, and their characteristics and problems are analyzed. Finally, possible prospects for the next step in trajectory generator research are briefly discussed, providing ideas for future research in this field.
Feb. 28, 2024Vol. 19 Issue 2 215 (2024)
Kexin LI, Jian GUO, Ranchong LI, Yujun WANG, Zongming LI, and Kun MIU
ObjectiveIn order to improve the accuracy and efficiency of ship trajectory anomaly detection, and solve the problems of traditional anomaly detection methods such as limited feature characterization ability, insufficient compensation accuracy, gradient disappearance and overfitting, an unsupervised ship trajectory anomaly detection method based on the Transformer~~LSTM codec module is proposed.MethodBased on the encoder decoder architecture, the Transformer~~LSTM module replaces the traditional neural network to achieve track feature extraction and track reconstruction. By embedding the transformer into the recursive mechanism of LSTM, combined with the cyclic unit and attention mechanism, self-attention and cross-attention can be used to calculate the state vector of the cyclic unit and effectively construct the long sequence model. By minimizing the difference between the reconstructed output and original input, the model learns the characteristics and motion mode of the general trajectory, and trajectories with a reconstruction error greater than the abnormal threshold are judged as abnormal trajectories. ResultsAIS data collected in January 2021 is adopted. The results show that the accuracy, precesion and recall rate of the model are significantly improved compared with those of LOF, DBSCAN, VAE, LSTM, etc. The F1 score is improved by 8.11% compared with that of the VAE~~LSTM model.ConclusionThe anomaly detection performance of the proposed method is significantly superior to the traditional algorithm in various indexes, and the model can be effectively and reliably applied to the trajectory anomaly detection of ships at sea.
Feb. 28, 2024Vol. 19 Issue 2 223 (2024)
Wentao HUANG, Zhao ZHONG, Wenhua ZHAI, Yuan ZHANG, and Chuanhua KANG
Objective In systematic operations, ship formation navigation faces such challenges as equipment damage, electromagnetic interference and complex operational environments. To solve these problems, this paper proposes a distributed network-based integrated navigation system and method for surface warship formations that can improve the robustness and flexibility of ship navigation in complex environments.Methods The formation cooperative navigation system is divided into the equipment level, subsystem level and system level. At the equipment level, the original navigation data of GNSS/INS is output. At the subsystem level, the node navigation data is output. At the system level, the formation cooperative navigation data is generated by fusion. In order to realize the data fusion of formation cooperative navigation at the system level, a distributed formation cooperative navigation network is constructed using the Floyd algorithm based on the principle of shortest baseline transmission path, and the node cooperative navigation data is generated through dynamic baseline transfer on the basis of the node navigation data. The formation cooperative navigation data is then output by fusing the cooperative navigation data of multiple nodes through the weighted least square method. Results The simulation results show that the proposed method successfully constructs a distributed cooperative navigation network which can ensure the uninterrupted navigation of damaged nodes through navigation support and improve the navigation accuracy of disturbed nodes through precision support.Conclusion The distributed cooperative navigation method has such advantages as anti-damage, anti-jamming and improved accuracy, enabling it to effectively deal with complex combat environments.
Feb. 28, 2024Vol. 19 Issue 2 233 (2024)
Zhuolin DENG, Wenlu YIN, Fen DU, and Gaosheng LI
ObjectivesIn order to effectively broaden the beam width of the 3 dB axis ratio of a Beidou antenna, this paper proposes a slotted laminated microstrip patch antenna loaded with parasitic elements. MethodsThe Beidou dual frequency band feature is realized through a two-layer substrate structure. The bandwidth is widened by slotting. Circular polarized radiation is achieved by cutting corners at the edge of the patch. At the same time, L-shaped parasitic elements are loaded around the patch to broaden the 3 dB axial ratio beam width of the antenna.ResultsThe measured and simulated results are in good agreement. The relative bandwidths of the antenna in the Beidou B1 and B2 bands are 3% and 7.5%. The beam width of the 3 dB axis ratio can reach 180° and 176°, and the maximum gain can reach 6 dBi. In the Beidou receiver test, the number of antenna satellites can reach more than 17, and the positioning accuracy is within meters. ConclusionsThis paper proposes and validates a high-precision positioning dual band Beidou navigation antenna with wide axis ratio beam width. The results can provide references for the design of small Beidou navigation antennas.
Feb. 28, 2024Vol. 19 Issue 2 245 (2024)
Pu CHENG, Huiling QIN, and Liang PU
ObjectiveAiming at the problem of the narrow dynamic range of current optical fiber displacement sensors, a balloon-like long-period fiber grating (LPFG) displacement sensor with a simple structure and easy preparation method is designed. MethodsBased on simulation and optimization by RSOFT software, the measurement range is determined by the balloon-like optical fiber under different curvatures. A multimode fiber balloon-like LPFG (MMF-BLPFG) formed by periodically embedding multimode fiber (MMF) into single-mode fiber (SMF) provides a reference peak for measuring the displacement. Using a precise continuous cutting device as the experimental basis, test samples consistent with the simulation results are prepared for testing. ResultsThe maximum displacement measurement range of 36 mm is achieved by measuring the drift of two resonance peaks. ConclusionsThe proposed sensor has good application potential in large-scale measurement scenarios such as the stability measurement and continuous monitoring of the underwater drainage space piping systems of ships.
Feb. 28, 2024Vol. 19 Issue 2 252 (2024)
© Copyright 2018-2021 | Chinese Laser Press.
All Rights Reserved 沪ICP备15018463号-20