







Please enter the answer below before you can view the full text.


2024
Volume: 19 Issue 1
30 Article(s)

Renran ZHANG, Lei ZHANG, and Yumin SU
ObjectiveAiming at the problem of ship hull number recognition, this paper proposes a real-time ship's hull number recognition method for unmanned surface vehicles (USVs). MethodsBased on a one-stage object detection model (e.g. YOLO), the attention mechanism is introduced to make the network more sensitive to the target area by the spatial information interaction module and divided attention method. Considering the effect of prior knowledge on accuracy, the adaptive anchor method and positive sample assignment strategy are utilized to improve the accuracy of regression. Aiming to resolve the problem of slow convergence at the beginning, the loss function is redesigned to speed up the convergence and enhance the stability of the network in the training phase. Finally, the proposed method is deployed in a USV to validate the availability of the recognition performance. ResultsThe results shows that the proposed method can achieve the recognition of ships and hull numbers simultaneously under Sea State 3 conditions, and has a 14% improvement in mean average precision (mAP) compared with the original model, with the ability to perform recognition in real time. ConclusionThe results of this study indicate that the proposed method can be applied to USVs to perform hull number recognition, even under complex ocean conditions.
Feb. 28, 2024Vol. 19 Issue 1 46 (2024)
Shuai SUN, Hongguang LYU, and Xiao HUANG
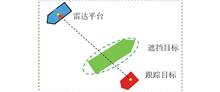
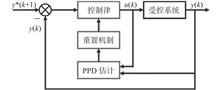
ObjectiveIn order to address track breakages that commonly occur in occluded environments for marine radar target tracking with an unmanned surface vehicle (USV), it is necessary to comprehensively utilize prior environmental information to improve track continuity when radar detection is occluded.MethodsAn occluded integrated probability data association (IPDA) algorithm, known as O-IPDA, is proposed for the real-time prediction of environmental occlusion information. Appropriate use is then made of its low detection probability in combination with a tailored track existence probability transition matrix to maintain target tracking performance.ResultsFor the application of single target tracking, O-IPDA can avoid target track loss in temporarily occluded environments where its track maintenance ability during occlusion is determined by the corresponding parameters in the existence state transition probability matrix.ConclusionsThe proposed O-IPDA algorithm has the potential to address target occlusion in complex maritime environments and can provide useful references for marine radar single target tracking.
Feb. 28, 2024Vol. 19 Issue 1 55 (2024)
Ning WANG, Wei WU, Yuanyuan WANG, and Henan SUN
ObjectiveTo address the problem of visual target tracking failure caused by significant wave interference and severe camera shaking in unmanned surface vehicles (USVs), a multi-feature fusion long-term correlation robust tracking algorithm is proposed. MethodsFirst, the multi-feature fusion technique is used to enhance the expression of target features and improve the robustness of the target model. Then, high-dimensional feature dimension reduction and response map sub-grid interpolation are utilized to improve the efficiency and accuracy of target tracking. After that, a mechanism for water surface target re-identification is designed to address the issue of stable tracking when the target is completely out of sight. Finally, the proposed algorithm is validated and compared through multiple representative video datasets. Results The experimental results show that compared with traditional long-term correlation tracking algorithms, the average success rate is improved by 15.7%, the average distance precision index is improved by 30.3% and the F-score index is improved by 7.0%. ConclusionThe proposed algorithm can handle target tracking failure in harsh marine environments and has important technical support significance for improving the intelligent perception capability of USVs and ocean robots.
Feb. 28, 2024Vol. 19 Issue 1 62 (2024)
Yulei LIAO, Congcong CHEN, Tingpeng DU, Bo WANG, and Ye LI
ObjectiveAiming at the uncertainty of model perturbation and external interference in unmanned surface vehicles (USVs), an improved model-free adaptive control (MFAC) method suitable for the heading control of USVs is proposed. MethodsBased on the existence of non-self-balancing characteristics in the heading control subsystems of USVs, this study directly discusses the control problem of the heading control subsystems of USVs under uncertain influences using the compact form dynamic linearization-based MFAC (CFDL-MFAC). The historical input items are introduced into the standard control criteria, and a variable output CFDL-MFAC (VCFDL-MFAC) is proposed to weaken the integral effect existing in the heading control subsystems of USVs. Finally, the simulation of USV heading control using the proposed method is carried out and a field-test with regard to validity for operation on board a Dophin IB small USV is conducted.ResultsThe results show that compared to the standard CFDL-MFAC method and PID method, the heading control of the VCFDL-MFAC method is more stable.ConclusionsThis study can provide a USV heading control algorithm with good adaptability and robustness that is insensitive to environmental disturbances and model perturbations.
Feb. 28, 2024Vol. 19 Issue 1 75 (2024)
Xianku ZHANG, and Haochen HONG
ObjectiveIn order to solve such problems as the large rudder angle output, high steering frequency, slow control speed and low control accuracy of controllers when ships sail at sea, a third-order closed-loop gain shaping algorithm is used to design a robust controller.MethodFirst, the linear robust controller is designed using the third-order closed-loop gain shaping algorithm, and hyperbolic tangent nonlinear modification and a zero-order holder are added to the control strategy. The performance of the controller is then simulated under different sea conditions.Results As the results show, compared with the traditional PID controller based on nonlinear modification, the proposed controller has improved delay time, control accuracy and energy output by 36%, 14% and 32% respectively under general sea conditions, and improved delay time, control accuracy and energy output by 27%, 7% and 16% respectively under heavy sea conditions. In addition, the simulation results of the controller under different sea conditions show stable rudder angle output and the ability to stabilize near the critical value quickly, proving that it has good robustness. ConclusionThe improved controller is in line with engineering practices and has good application reference value for the control of intelligent ships.
Feb. 28, 2024Vol. 19 Issue 1 84 (2024)
Xiuying HUANG, Haitao LIU, and Xuehong TIAN
ObjectiveTo solve the trajectory tracking problem of underactuated surface vessels (USVs) under the condition of model uncertainty, strong coupling characteristics and controller input saturation, this study proposes a predefined time tracking control method for USVs based on input saturation.MethodsDue to the non-zero diagonal terms and strong coupling characteristics of the USV model, coordinate transformation is introduced to transform the system model into a diagonal form. The predefined time performance function is combined with the barrier Lyapunov function (BLF) to ensure transient and stable tracking performance. Self-structuring neural networks (SSNN) are used to approximate unknown external disturbances and complex continuous unknown nonlinear terms, and deal with the impact of actuator saturation, thus ensuring the tracking performance of the control system. Moreover, the number of SSNN neurons can be adjusted online, reducing the computational burden on the control system. ResultsBased on Lyapunov stability theory, it is proven that the closed-loop system is bounded stable in a predefined time, and the tracking error is always within the constraint range.ConclusionThe simulation results show that the proposed control strategy is effective and has good tracking performance.
Feb. 28, 2024Vol. 19 Issue 1 98 (2024)
Wei LI, Yu WANG, Jun NING, and Zhihui LI
ObjectiveThis paper develops a heading tracking design strategy for unmanned ships with state quantization and input quantization in order to address the problem of limited communication at sea for unmanned ships on the water surface.Methods First, a control law is designed on the basis of backstepping and combined with dynamic surface control to reduce the computational complexity of the virtual control law. An extended state observer is also designed to estimate uncertainties and unknown disturbances. Second, all state variables and control variables in the control system are assumed to be quantized by the uniform quantizer, and the quantized state feedback information is only available for the tracking control design. A controller of unmanned ships based on the extended state observer and using quantized states is recursively designed to ensure the tracking of the desired heading. The boundedness of the quantization errors between quantized variables and non-quantized variables in the closed-loop system is analyzed by presenting several theoretical lemmas.ResultsBased on the Lyapunov stability theory, the stability of the designed unmanned ship heading tracking control system with state quantization and input quantization is demonstrated, and the simulation results verify the effectiveness of the resulting tracking scheme. Conclusion The results of this study can provide references for the heading tracking of unmanned ships.
Feb. 28, 2024Vol. 19 Issue 1 111 (2024)
Autonomous berthing control of tugboat based on improved backstepping sliding mode control algorithm
Jialun LIU, Zhilin DONG, Shijie LI, Xu YOU, and Yingjun HU
ObjectiveAiming at the problem of the autonomous berthing control of tugboats, this study focuses on the application of a target tracking control strategy based on virtual leadership. MethodsFirst, the autonomous berthing process of the tugboat is transformed into the target tracking control process of the virtual tugboat and actual tugboat. A kinematics model of the berthing system is then designed. Considering special environmental interference in the berthing scenario, the backstepping method and sliding mode control method are used to design an autonomous berthing controller for an azimuth stern drive tugboat. Three different sliding mode surfaces are provided and the stability is verified by the Lyapunov function. Finally, a simulation test is used to verify the control effect through the berthing trajectory, speed error and distance error. ResultsThe simulation results show that the designed tugboat autonomous berthing control strategy and controller have a good effect in the tugboat autonomous berthing scenario and good performance in the face of uncertain disturbances of the system. ConclusionsThe control strategy and berthing controller designed in this paper have good applicability and robustness. The autonomous berthing control of tugboats is realized from a new angle, providing a new direction for subsequent research on the berthing control of tugboats.
Feb. 28, 2024Vol. 19 Issue 1 119 (2024)
Ling YANG, Haixiang XU, and Wenzhao YU
ObjectiveThis paper proposes a null-space-based active disturbance rejection control (ADRC)allocation method to analyze the influence of multi-source disturbances encountered during the autonomous berthing of ships, such as environmental loads, bank effects, model uncertainties and control allocation errors.Methods First, a ship berthing motion model, multi-source disturbance model and control allocation model are established, and a neural network extended state observer (NNESO) is designed to estimate ship states and multi-source disturbances in real time. Second, null-space technology is introduced to design the control allocation algorithm. Based on this method, a scheme for stabilization control outside the berth and parallel berthing is realized. Finally, it is proven that all error signals of the autonomous berthing system under the proposed method remain uniformly ultimately bounded, ensuring the safety of the autonomous berthing process.ResultsThe comparative simulation results show that the proposed method has a trajectory tracking effect similar to that of the quadratic programming (QP) method, with a solution time of about 1.3% and a yaw maximum allocation error of 36.51% of the pseudo inverse (PI) method. ConclusionThe proposed method not only ensures the accuracy of berthing motion control, but also significantly reduces the solution time and maximum allocation error, thereby ensuring real-time control allocation with high accuracy.
Feb. 28, 2024Vol. 19 Issue 1 128 (2024)
Lifei SONG, Chuanyi XU, Le HAO, Rong GUO, and Wei CHAI
ObjectiveIn order to tackle the issue of the poor navigation stability of unmanned surface vehicles (USVs) under interference conditions, an intelligent control parameter adjustment strategy based on the deep reinforcement learning (DRL) method is proposed. MethodA dynamic model of a USV combining the line-of-sight (LOS) method and PID navigation controller is established to conduct its navigation control tasks. In view of the time-varying characteristics of PID parameters for course control under interference conditions, the DRL theory is introduced. The environmental state, action and reward functions of the intelligent agent are designed to adjust the PID parameters online. An improved deep deterministic policy gradient (DDPG) algorithm is proposed to increase the convergence speed and address the issue of the occurrence of local optima during the training process. Specifically, the original experience pool is separated into success and failure experience pools, and an adaptive sampling mechanism is designed to optimize the experience pool playback structure. ResultsThe simulation results show that the improved algorithm converges rapidly with a slightly improved average return in the later stages of training. Under interference conditions, the lateral errors and heading angle deviations of the controller based on the improved DDPG algorithm are reduced significantly. Path tracking can be maintained more steadily after fitting the desired path faster.ConclusionThe improved algorithm greatly reduces the cost of training time, enhances the steady-state performance of the agent in the later stages of training and achieves more accurate path tracking.
Feb. 28, 2024Vol. 19 Issue 1 137 (2024)
Jinheng JIA, Yan HUANG, Wentao ZHAO, Zhaoyang SUN, and Minxiu YAN
ObjectiveAn unmanned sailboat trajectory tracking method based on model predictive control (MPC) is proposed for the collaborative operation of unmanned sailboats in surface/underwater cross-domain heterogeneous marine robotics scenarios.MethodsUsing the unmanned sailboat Seagull, we establish its dynamics and kinematics models, analyze its dynamic characteristics and actuator constraints, construct the MPC objective function and system constraints, convert the trajectory tracking problem of the unmanned sailboat into an optimization problem and carry out simulation and experimental validation using Matlab software.ResultsThe simulation results show that compared with the sail-rudder separate PID trajectory tracking control method, the proposed sail-rudder joint MPC control method is more convenient for adding constraints. It can converge to the specified trajectory faster with smaller trajectory tracking error under a changing wind direction and realize upwind zigzag sailing.ConclusionThe results of this study can provide new ideas for the sail and rudder control of unmanned sailboats, improve the trajectory tracking ability and provide a further technical guarantee for the efficient collaborative operation of unmanned sailboats and AUVs.
Feb. 28, 2024Vol. 19 Issue 1 145 (2024)
Yu WENG, Qingjun ZENG, Wei LI, Ang LI, and Xiaoqiang DAI
ObjectiveAiming at the difficulties of the accuracy maintenance and tracking control of unmanned surface vessels (USVs) operating in narrow lakes and culverts, an intelligent predictive control method for trajectory tracking is proposed on the basis of a self-developed small torpedo-type USV.MethodsFirst, a self-developed nonlinear state space model of the underactuated USV is constructed. An intelligent predictive controller is designed on the basis of the model predictive control design concept and combined with an improved particle swarm optimization (PSO) algorithm to make online decisions, optimize the performance indicators at every moment and correct the predicted state. Finally, simulation and lake tests are carried out to test the tracking performance of the system on reference trajectories, and the tracking performance is compared with that of the linear model predictive controller. ResultsThe results show that the designed intelligent predictive controller has fast response speed, small overshoot and good anti-interference capabilities.ConclusionThe proposed method can not only be applied to the tracking systems of small torpedo-type USVs, but can also provide references for other USV tracking systems.
Feb. 28, 2024Vol. 19 Issue 1 158 (2024)
Junjie LIU, Jian WANG, Xing WANG, Jun WANG, and Xiaofeng LIANG
ObjectiveTarget tracking is an important application of unmanned surface vehicles (USVs). This study proposes a relative time-varying tracking position (RTTP) strategy to improve the tracking stability and address the problem that the reference trajectory obtained by the relative fixed tracking position (RFTP) strategy contains inflection points and leads to tracking instability.MethodsA first-order hysteresis filter is used to process the target USV's heading variation. The time-varying tracking position is then designed according to the filtered data, the target tracking problem is transformed into a trajectory tracking problem and the reference trajectory is obtained. Finally, model predictive control (MPC) is used to achieve the tracking of the target USV.ResultsThe simulation experimental results show that the tracking effect of the USV under the RTTP strategy is more stable with the root mean square error (RMSE) of the tracking distance decreased by 28.06% and the energy consumption reduced by 5.93%. It also has advantages in the smoothness of the control volume.ConclusionsCompared with the traditional RFTP strategy, the proposed RTTP strategy can effectively improve the stability of USV target tracking, giving it practical significance for the target tracking of USVs.
Feb. 28, 2024Vol. 19 Issue 1 169 (2024)
Optimal trajectory tracking control of unmanned surface vehicle formation under unknown disturbances
Ning WANG, Yongjin LIU, and Ying GAO
ObjectiveA finite-time disturbance observer-based optimal backstepping control (FDO-OBC) method is proposed for the issue of unknown disturbances and formation changes in the formation trajectory tracking of unmanned surface vehicles (USVs).MethodsFirst, the USV formation control framework is established on the basis of the virtual structure method, and the kinematics and dynamics formation controllers are designed. Second, a finite-time disturbance observer is introduced to estimate and compensate for unknown environmental disturbances in real time. Further, a dynamic trajectory optimization strategy based on optimal backstepping control is proposed for the trajectory tracking issue of formation change, and the information of the disturbance observer is used to calculate the optimal control input and achieve the dynamic optimization of USV formation trajectory tracking. Finally, Lyapunov stability theory is used to demonstrate the stability of the designed formation control method.ResultsThe simulation results indicate that the proposed control strategy can effectively improve the accuracy and robustness of the USV formation system.ConclusionThe FDO-OBC method provides a new technical means for the design of USV formation control systems under unknown environmental disturbances.
Feb. 28, 2024Vol. 19 Issue 1 178 (2024)
Ming DING, Lei WANG, Ying DING, and Yiting WANG
ObjectiveThis paper puts forward the “virtual wall method” as a novel formation approach intended to address such problems as the high communication volume, slow formation speed and inconvenient expansion of large-scale ship formation. MethodThe proposed method uses local communication, sets virtual force according to the rules of nature to drive the ships to the target positions, and adjusts the formation to completion through the virtual wall. ResultsThe results show that the ship formations can be completed quickly according to the proximity principle using the proposed algorithm, and the communication volume is low without changing with the formation size. The effectiveness of this algorithm is verified by static, dynamic, rotation, scaling and obstacle avoidance simulations of ship formations. ConclusionThe virtual wall method features low communication volume, fast formation speed and convenient expansion, giving it significant advantages in the large-scale formation of ships.
Feb. 28, 2024Vol. 19 Issue 1 191 (2024)
Jianhua LI, Qingwei HU, and Zhongchang LIU
ObjectiveIn order to realize formation control for multiple unmanned surface vehicles (USVs) subject to practical needs, a distributed event-triggered formation control method for multiple USVs is proposed which is capable of ensuring collision avoidance and connectivity preservation. MethodsConsidering the disturbances caused by marine environments and the uncertainties of system models, a disturbance observer is designed. Aiming to avoid potential collisions and the loss of connectivity among USVs during the process of realizing the desired formations, artificial potential field functions are utilized to design a controller with collision avoidance and connectivity preservation abilities. To reduce the frequency of control updates, a distributed event-triggering mechanism is designed for each USV, enabling it to determine the execution time of its own control input based on local information. ResultsTheoretical analysis proves the uniform ultimate boundedness of formation errors, and the event-triggered mechanism does not display Zeno behaviors. The simulation results validate that the proposed control method can significantly reduce the number of controller updates and prevent collisions among USVs while maintaining their connectivity.ConclusionThe results of this study can help to ensure the safe formation control of USVs and reduce the wear and tear of control devices.
Feb. 28, 2024Vol. 19 Issue 1 200 (2024)
Ming MA, Nan GU, Jiawei DONG, Yong YIN, Bing HAN, and Zhouhua PENG
ObjectiveAiming at the area coverage problem of multiple autonomous surface vehicles (ASVs), this paper investigates a coverage path planning (CPP) strategy based on an electronic chart display and information system (ECDIS). MethodFirst, according to the information of sea, land and water depth from ECDIS, an environmental model for the area coverage of ASVs is established based on the grid method. Second, an area division method based on the roulette wheel selection method is proposed to solve the problem of irregular area division in divided areas based on the robots' initial position method, and achieve the reasonable area division of ASVs in the grid map. Finally, a template-based area coverage path planning method is proposed to solve the problem of generating too many turns in paths generated by the spanning tree coverage agorithm.ResultsA human-machine interactive simulation platform for ASVs based on ECDIS is established to verify the effectiveness of the proposed area coverage path planning method based on the roulette wheel method and template method in optimizing the number of turns in the planning path. ConclusionThe proposed area coverage path planning method for ASVs based on ECDIS can be used to achieve coverage path planning in target mission areas at sea.
Feb. 28, 2024Vol. 19 Issue 1 211 (2024)
Zhihuan HU, Ziheng YANG, and Weidong ZHANG
ObjectiveThis paper develops a multi-stage path planning algorithm for the auto docking operation of an underactuated surface vehicle (USV). As one of the most difficult tasks, docking requires advanced maneuvering skills. Therefore, it is necessary to generate a smooth trajectory in the berthing environment while maintaining control accuracy. MethodThe proposed method introduces a hybrid A* search algorithm in the pre-docking stage in which the well-known A* search algorithm is combined with the kinematic state space of the USV using the Reeds–Shepp curves, enabling it to produce sub-optimal paths that guarantee kinematic feasibility and low collision risk. For the docking stage, a cubic Bezier curve is introduced to represent the target path. The generated trajectories are then tested in numerical simulations wherein a mathematical model of a ship with two fixed propellers is established and verified. ResultsThe simulation and experimental results show that the path planning and tracking performance of the method are satisfactory.ConclusionThe proposed path planning method can contribute to automatic ship docking and the development of smart ships.
Feb. 28, 2024Vol. 19 Issue 1 220 (2024)
Guangze LI, Wanneng YU, Weiqiang LIAO, and Chuanbo WU
ObjectiveAn improved dynamic window method is proposed to solve the obstacle avoidance problem of intelligent ships in offshore waters, which cannot be effectively avoided when facing pinch and mixed dynamic-static encounters. MethodsIn order to obtain the constraints of ships navigating in offshore waters, the factors affecting ship obstacle avoidance in offshore waters are analyzed, and the minimum obstacle avoidance requirements for ship navigation in offshore waters are proposed. The objective function of the Dynamic Window Approach (DWA) is then optimized, improved and correlated with the distance between the ship and obstacles to enhance the safety of the ship in the navigational chart, while the heading weights in the objective function are introduced into the judgment of the ship's encounter posture so as to enable the target ship to effectively judge its obstacle-avoidance responsibility. Finally, the effectiveness of the improved algorithm is verified through simulation. ResultsThe simulation results show that the proposed improved algorithm can clearly judge the ship's obstacle-avoidance responsibility and reduce the steepness of speed change in the sailing process, and the planned ship sailing path can effectively improve the safety of ship operation in case of encountering pincer attacks and complex encounters respectively. Conlusion The proposed obstacle avoidance algorithm can provide useful references for solving the collision avoidance failure problem of intelligent ships encountering complex encounter scenarios in offshore waters.
Feb. 28, 2024Vol. 19 Issue 1 230 (2024)
Hao CUI, Xinyu ZHANG, Jing WANG, Chengbo WANG, and Kangjie ZHENG
ObjectiveThis study investigates the interactive collision avoidance (CA) problem of autonomous and manned ships in mixed navigation scenarios in order to achieve the efficient collision avoidance and safe navigation of ships. To this end, a multi-agent interactive ship dynamic game collision avoidance decision-making method is proposed. MethodsAccording to sailing practices, the ship collision avoidance problem in mixed navigation environments is analyzed and understood, and the ship encounter situation and collision risk are quantified on the basis of the International Regulations for Preventing Collisions at Sea (COLREGs). Dynamic game theory is introduced to model individual ships with collision risk as participants with independent thinking in the game, and the course changes of ships are taken as the strategy for determining the optimal action sequence under the constraints of ship safety and social and economic benefits. Different ship maneuvering modes are introduced to the simulation experiment, and the effectiveness of the collision avoidance decision-making method is verified using Python. ResultsThe results show that this method can realize the safe encounter of multiple ships in a mixed navigation environment of autonomous and manned ships, and each ship can adjust its behavior strategy to achieve safe avoidance when facing target ships with different sailing styles. ConclusionThis study can provide valuable references for the collision avoidance decision-making of autonomous and manned ships.
Feb. 28, 2024Vol. 19 Issue 1 238 (2024)
Zhehao SU, Weiran WANG, Xiaoqiang DAI, Zhiyu ZHU, Jie YAO, and Huilin GE
ObjectiveThe independent cabling operation of an autonomous underwater vehicle (AUV) in complex submarine terrain should balance cabling quality with self-safety, which means that the AUV should maintain a stable height relative to the seabed. To this end, this paper designs an optimal obstacle avoidance design for a cable-laying AUV based on model prediction control (MPC).Method First, the method establishes a path-following control model based on MPC. It then classifies different obstacles into topographic bulges or depressions, and establishes a simplified mathematical model of the obstacles. Second, the method designs multiple objective optimization functions for different topographic environments according to the feature points, allowing the AUV to choose the shortest path with the minimum variation in cable-laying height. ResultsThe results show that this method achieves the most minimal changes in cable-laying height while also choosing the most optimal path to avoid obstacles. ConclusionThe proposed method not only ensures the safety of AUVs in complex submarine terrain, but also greatly improves the laying quality of submarine cables.
Feb. 28, 2024Vol. 19 Issue 1 248 (2024)
Yuanpeng YANG, Lifei SONG, Jiaqi MAO, Yi LI, and Houjing CHEN
ObjectiveAiming at the encirclement tactics adopted by enemy ships, this study focuses on the problem of planning an escape strategy when an unmanned surface vehicle (USV) is surrounded by enemy ships. MethodsA hybrid sampling deep Q-network (HS-DQN) reinforcement learning algorithm is proposed which gradually increases the playback frequency of important samples and retains a certain level of exploration to prevent it from falling into local optimization. The state space, action space and reward function are designed to obtain the USV's optimal escape strategy, and its performance is compared with that of the deep Q-network (DQN) algorithm in terms of reward and escape success rate. ResultsThe simulation results show that using the HS-DQN algorithm for training increases the escape success rate by 2% and the convergence speed by 20%. ConclusionsThe HS-DQN algorithm can reduce the number of useless explorations and speed up the convergence of the algorithm. The simulation results verify the effectiveness of the USV escape strategy.
Feb. 28, 2024Vol. 19 Issue 1 256 (2024)
Wenxuan GUO, Zihao LI, Guoyuan TANG, Quanbin WANG, Jianglong SUN, Jie MA, and Yu QIAO
ObjectiveThis paper presents a tracking control method based on dynamic programming guidance to address the challenges presented by the autonomous recovery of underactuated unmanned surface vehicles (USVs). MethodsAt the kinematic level, constant bearing approach (CB) guidance is combined with a dynamic window algorithm (DWA) to guide the USV in achieving target tracking and dynamic obstacle avoidance. At the dynamic level, considering the uncertainties in the model parameters and recovery environment, a radial basis function neural network (RBFNN) is employed to design a dynamic sliding mode controller for the tracking control of the guidance output. Finally, the stability of the system is analyzed using Lyapunov theory. ResultsThe simulation results demonstrate that the proposed method enables the USV to exhibit stable tracking performance, effectively avoid dynamic obstacles during the recovery process and adapt to uncertain factors in the estimation model and unknown environmental disturbances. ConclusionThe proposed method exhibits strong robustness and flexibility, providing valuable references for the guidance and target tracking of USVs during recovery in dynamic environments.
Feb. 28, 2024Vol. 19 Issue 1 264 (2024)
Jiejie KONG, Jianyao WANG, and Hongdong WANG
ObjectiveTo solve the problem of the autonomous and safe landing of multi-rotor unmanned aerial vehicles (UAVs) in the application of unmanned platforms at sea, this paper studies multi-rotor UAV landing devices and their safety boundary assessment methods.MethodBased on the idea of the "Harpoon-Grid" rapid securing system, a new type of "V-foot–net" landing device is designed for multi-rotor UAVs. Multi-rigid body dynamic models of the UAV and deck are established, and simulations of the landing process are carried out using ADAMS under different rolling amplitudes and period conditions to obtain the attitude change process, landing critical period and attitude stabilization time of the UAV. ResultsThe simulation results show that the proposed "V-foot–net" device has higher docking redundancy under a smaller rolling period and larger rolling amplitude, and achieves attitude stability faster than ordinary landing devices.ConclusionThe results show that this device has superior safety compared to ordinary devices, and its safety boundary obtained through simulation can provide valuable references for improving the reliability of the autonomous landing of UAVs on offshore platforms.
Feb. 28, 2024Vol. 19 Issue 1 272 (2024)
Shijie LI, Chengqi XU, Jialun LIU, Ziqian XU, and Fanbin MENG
ObjectiveThis paper aims to investigate the complex influence of environmental disturbances on unmanned surface vehicles (USVs) under real ocean conditions, and control USVs to overcome disturbances and realize path following. MethodsAn improved active disturbance rejection controller (ADRC) based on the model-free adaptive control (MFAC) law (ADRC-MFAC) is proposed to establish the non-linear relationship between the input data (rudder angle) and output data (heading angle, angular velocity), and identify the unknown disturbances of the system. In this way, stable heading control can be achieved. Combined with the adaptive line-of-sight (LOS) guidance law, it achieves accurate tracking control through dynamic heading control.ResultsThe simulation results show that the controller can control USVs to approach the preset path quickly and achieve a desirable tracking control effect under complex disturbances. ConclusionThe research results do not depend on the specific model of USV and can provide valuable references for ship tracking control.
Feb. 28, 2024Vol. 19 Issue 1 280 (2024)
Youwang LU, Yingkai XIA, Guohua XU, Jiawei LI, Gen XU, and Zixuan HE
ObjectiveAutonomous docking is the key to the cooperative operation of unmanned underwater vehicles (UUVs). However, due to environmental complexity and object characteristics, it is very difficult to achieve precise guidance and docking. In order to improve the accuracy and robustness of underwater docking, this study proposes a vision-guided docking scheme which encompasses vision processing and 3D trajectory tracking control. MethodsFirst, the overall vision-guided docking scheme is designed in combination with an analysis of task and object characteristics. Second, the YOLOv5 neural network is designed to complete the target detection of the underwater docking station, and the online measurement of the relative position and attitude relationship between the docking station and UUV is realized by an efficient perspective-n-point (EPnP) algorithm. Next, combined with the visual measurement results, an effective 3D robust trajectory tracking controller is designed on the basis of the 3D LOS guidance law, radial basis function neural network (RBFNN) and terminal sliding mode control (TSMC). Finally, the validity of the proposed scheme is verified through numerical simulation and a tank test. ResultsIn the tank test, the proposed vision-guided control algorithm can effectively complete the online detection and relative positioning of the underwater docking station, thereby achieving precise underwater docking. ConclusionThe results of this study show that the proposed vision-guided 3D trajectory tracking control scheme is reasonable and efficient, and can lay a good foundation for UUV docking.
Feb. 28, 2024Vol. 19 Issue 1 290 (2024)
Hongkun HE, Ning WANG, Fuyu ZHANG, and Bing HAN
The monocular camera can both perceive the surroundings and measure the motion states of an unmanned surface vehicle (USV) by imitating the functions of human vision, such that the monocular visual servo is an important means of improving the navigation perception and control autonomy of USVs. Starting from basic principles, the classification of visual servo methods, perspective projection model of the camera and mathematical model of the USV are briefly described so as to provide a fundamental framework for the literature review. According to task complexity, the research progress and challenges of monocular visual servo-based USV control are then summarized in four typical scenarios, namely course control, stabilization control, trajectory tracking control and swarm control. Finally, the future trends of the monocular visual servo-based autonomous control of USVs are systematically summarized.
Feb. 28, 2024Vol. 19 Issue 1 15 (2024)
Wenqian WANG, Penglei MA, Guanghao LI, Chuanxin XU, Bing YAO, and Guijie LIU
The advantages of fish such as high propulsion efficiency, strong maneuverability and low environmental disturbance have sparked extensive research on bionic robotic fish by both domestic and international scholars. The basic-level gait control method and closed-loop motion control method are currently two hot topics in research on robotic fish control. According to the propulsion mode classification method, this paper summarizes the prototype development and performance of various robotic fish, introduces the research progress of the propulsion mechanisms and hydrodynamics of robotic fish, focuses on two basic gait control ideas, namely the trajectory approximation method and central pattern generator (CPG), and summarizes the typical closed-loop motion control method. The CPG method has stronger flexibility, stability and operability, and it is easy to introduce feedback items and achieve closed-loop control, for which it plays a leading role in the basic gait control of robotic fish; while the improved learning-based control method and hybrid control method combining multiple methods based on the significant characteristics of robotic fish have broader development prospects, which is in line with the development direction of intelligent biomimetic robotic fish. Establishing a reasonable gait control system and an accurate and efficient closed-loop motion control system based on working conditions and motion requirements is the key to improving the overall performance of robotic fish.
Feb. 28, 2024Vol. 19 Issue 1 29 (2024)
Shu HE, Yingjun XIONG, Lingjun XIAO, Tao LEI, and Man ZHU
ObjectiveAs the complicated and changing environment on the water imposes uncertain interference on the control of unmanned surface vehicles (USVs), a heading and speed controller for USVs with a Type-2 fuzzy control algorithm is proposed. On this basis, an intelligent autonomous and robust control system is developed. MethodsFirst, a motion characteristic model for heading and speed is constructed. The recursive least square (RLS) method is then used to identify the parameters of the model. Finally, based on the identified model, a Type-2 fuzzy control algorithm and sliding mode control algorithm are designed and validated through actual ship experiments.ResultsAs the experimental results indicate, compared with the sliding mode control algorithm, the Type-2 fuzzy control algorithm demonstrates better robustness and ideal anti-interference ability in controlling USVs, but its real-time response is slightly longer. ConclusionThe results of this study can provide references for the motion control of USVs subjected to uncertain interference.
Feb. 28, 2024Vol. 19 Issue 1 90 (2024)
Guoshuai LI, Xianku ZHANG, and Anchao ZHANG
This paper reviews the research status of intelligent ship berthing technology at home and abroad in recent years. The hotspots and applications of berthing technology are summarized in the three aspects of berthing mode, mathematical model and control algorithm. The remaining problems in this field are analyzed in terms of autonomy, modeling accuracy, path planning, control algorithm, energy-saving effect and system test. Based on actual navigation needs, it is proposed that the next step is to make breakthroughs in core theories and key technical problems such as information fusion, online modeling, intelligent decision-making, optimization algorithms, green energy conservation and testing technology. The autonomy, robustness, rapidity and "toughness" of berthing technology should be improved so as to realize safe, green and efficient intelligent shipping.
Feb. 28, 2024Vol. 19 Issue 1 3 (2024)
© Copyright 2018-2021 | Chinese Laser Press.
All Rights Reserved 沪ICP备15018463号-20