




 View fulltext
View fulltext

2024
Volume: 53 Issue 8
24 Article(s)

Hongyan JIANG, Bing SUN, Deying CHEN, Yiqin JI, Tianhe WANG, and Rongwei FAN
ObjectiveSpectral characterization testing is a key step in the thin film preparation process. Through this testing, the optical properties of the thin film can be determined, providing important foundations for optimizing and evaluating the performance of the thin film in applications. In narrowband filter testing, common spectroradiometers have a certain divergence angle. This divergence angle causes the incident light not to be perpendicular, resulting in wavelength-angle shift errors. These errors manifest as a shift towards the shortwave direction of the center wavelength, a decrease in peak transmittance within the passband, an increase in bandwidth, and a decrease in the steepness of the transition zone. These factors can lead to measurement errors during narrowband filter testing. To address this issue, a high-precision spectral characterization and metrology system has been developed in this study.MethodsBy establishing a physical model of beam incidence, the divergence angle effect of beam incidence was analyzed, and the impact of angles on the center wavelength, peak transmittance, and full width at half maximum of narrowband filters was examined. A high-precision spectral characterization and metrology system (Fig.2) was set up using a laser beam with a small divergence angle as the light source. Furthermore, a comparison was conducted between the commonly used spectroradiometer test and the high-precision spectral characterization test system.Results and DiscussionsThrough the preparation and testing of a 532 nm narrowband filter, the spectral performance of the commonly used spectroradiometer test shows a shift of the center wavelength towards the shortwave direction, a decrease in peak transmittance within the passband, and a widening of the bandwidth, with a decreasing trend in the steepness of the transition region (Fig.7). The high-precision spectral characterization test results in a center wavelength of 532 nm, a peak transmittance of 87.2%, and a full width at half maximum of 0.79 nm (Tab.2), which are closer to the theoretical design curve. By comparing the spectral transmittance curves at different angles of 5° and 10°, the impact of the angle on the narrowband filter is validated (Fig.8).ConclusionsA high-precision spectral characterization and metrology system has been developed. Compared to traditional spectroradiometer testing, the high-precision spectral characterization test system can provide more precise test results. Spectral testing was conducted on a 532 nm narrowband filter to validate the practicality of the system. The high-precision spectral characterization and metrology system play a critical role in guiding the design and preparation of narrowband filters and are crucial in evaluating filter performance.
Aug. 25, 2024Vol. 53 Issue 8 20240131 (2024)
Hongguang LI, Fulun PENG, Shaobo WU, Shuai YU, and Chuangfei BAI
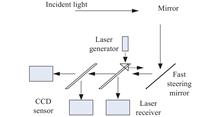
ObjectiveThe photoelectric system with embedded mirror in optical path is one of the main means to achieve high precision stabilization. Due to the complex compensation principle of optical path embedded composite axis stability in the reflector photoelectric system and many error factors in each link of the system, there is a large gap between stability accuracy of the line of sight (LOS) and the actual theoretical value in the actual project development. In order to meet the high precision and stability demands of various weapon platforms for the optical path embedded composite axis of the reflector photoelectric system, and to solve the problem of difficulty in controlling the coupling of various error sources in practical development, this paper analyzes the influence of each error factor on the stability error of the system, in order to provide a theoretical basis for improving the stability accuracy of the composite axis with embedded mirror in the optical path.MethodsFirstly, the system composition of the reflector type optical path embedded composite axis stabilization platform is introduced, and the coordinate systems related to the optical path embedded composite axis platform are established (Fig.2). Then, the stability principle of the system is analyzed, and the quantitative relationship between the angle of the mirror and the compensation angle error of the LOS is developed. Next, based on the above principles, the effects of the linearization of the relationship between the angle of the fast steering mirror(FSM) and the compensation angle error of the LOS, the orthogonality error between shafting and the angle measurement accuracy of the FSM, on the compensation angle error of the LOS are analyzed theoretically, and quantitative relationships between above influencing factors and the compensation angle error of the LOS are developed. Finally, based on these quantitative relationships, simulation verifications are carried out (Fig.3-18).Results and DiscussionsThe compensation angle error of the LOS caused by the linearization of the relationship between the angle of the mirror and the compensation angle error of the LOS increases with the angle of the mirror, and is independent of the pitch angle of the first-stage platform (Fig.3-6). Both azimuth and pitch compensation angle error of the LOS increase with the increase of the FSM installation error, and the pitch angle of the first stage platform has no effect on the compensation angle error of the LOS; both azimuth and pitch compensation angle error of the LOS increase with the increase of the gyro installation angle error as well as with the increase of the pitch angle of the first stage platform. The simulation results show that when the system maximum error is limited to no more than 2 μrad, the relationship between the angle of the FSM and the deflection angle of the LOS cannot be realized by the simplified linearization relationship. Meanwhile, the orthogonal installation errors of both the gyroscope and the FSM, both azimuth and pitch angle measurement errors of the FSM need to be narrowed to micro-radian level.ConclusionsBased on the stability principle of the reflector type optical path embedded composite axis platform, this paper theoretically analyzes the linearization between the angle of the FSM and the angle of the LOS, the orthogonality error of the gyroscope and the installation of the FSM, and the influence of the angle measurement accuracy of the FSM on the stability error of the system’s LOS compensation, and carries out simulation analysis. It provides a design basis for the engineering development of high precision optical path embedded composite axis platform for reflector type photoelectric system.
Aug. 25, 2024Vol. 53 Issue 8 20240155 (2024)
Shuangquan YANG, Shulin DONG, Ning JIN, Zirong WANG, Kaiyu YANG, Jing LI, Dan YANG, and Man XU
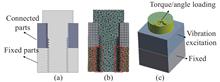
ObjectiveThe impact and vibration loads often accompany the working environment of infrared imager, which may cause the optical axis to shift and affect its directionality and imaging quality. Vibration environment leads to a decrease or even complete loosening of the pretension of screwed joints, leading to irreversible deformation of the connected components, especially the optical components (such as lens mounting bases and mirror mounting bases), resulting in the drift of the optical axis. Therefore, the pretension of screwed joints is an important factor affecting the optical axis vibration stability of infrared imagers. This work aims to explore the mechanism by which the pretension of screwed joints affects the optical axis drift of infrared imagers. It will provide practical guidance for improving the reliability of screwed joints to ensure the optical axis vibration stability of infrared imagers.MethodsTo explore the mechanism of the influence of screwed joint reliability on the optical axis vibration stability of infrared imagers. This work presents a detailed modeling of screwed joints using Ansys Workbench finite element analysis software (Fig.1). Using transient dynamic analysis methods, the mechanism of the influence of vibration on the pretension of screwed joints and measures to improve the reliability of screwed joints are analyzed. Furthermore, taking the folding reflector assembly as the research object, an equivalent finite element model of the screwed joints was established (Fig.4), and a testing system is established (Fig.8). The simulation results are consistent with the experimental data, with an error of around 10%.Results and DiscussionsThis work establishes a detailed finite element model of screwed joint based on Workbench, and uses transient dynamics method to analyze the influence mechanism of vibration on the pretension of screwed joints. The simulation results show that the overall stress level of screwed joints decreases under vibration load, and the pretension and rotation angle of screws have an almost synchronous trend of change (Fig.3). The loosening of screw rotation is the main reason for the reduction in pretension. Furthermore, taking the optical axis sensitive component, the folding reflector assembly, as the object, an equivalent finite element model of the screwed joint was established. Simulation analysis and experimental verification were conducted on the effect of pretension changes on the optical axis drift. The simulation results show that the change in pretension of the mounting screws on the mirror base has a significant impact on the optical axis drift, while the change in pretension of the mounting screws on the mirror has a relatively minor impact(Fig.6 and Fig.7); The simulation results and experimental results of the effect of the change in pretension of the mounting screw on the deviation of the first mirror are within 10% (Fig.9), which verifies that the change in pretension of the screw will have an impact on the optical axis drift. Finally, based on a detailed finite element model of screwed joint, measures to improve the reliability of screwed joint were analyzed. The results showed that fine-pitch screws have better anti loosening performance compared to coarse-pitch screws (Fig.10), increasing the friction coefficient of the thread contact surface and the friction resistance of the support surface can improve the vibration anti loosening performance of screwed joint (Fig.11 and Fig.12), and the thread glue has a significant effect on improving the vibration anti loosening performance of the thread connection (Fig.14). The research results have practical guiding significance for improving the reliability of screwed joint to ensure the optical axis vibration stability in infrared imagers.ConclusionsThis article establishes a detailed finite element model of screwed joints based on Ansys Workbench, and uses transient dynamic methods to analyze the mechanism of the influence of vibration on the pretension of screwed joints. Furthermore, taking the optical axis sensitive component of a certain type of infrared imager, the folding reflector assembly, as the object, an equivalent finite element model of the threaded connection was established. Simulation analysis and experimental verification were conducted on the effect of pretension changes on the optical axis drift. Finally, based on a detailed finite element model of screwed joints, measures to improve the reliability of screwed joints were analyzed, and the following conclusions were drawn: 1) Under vibration loads, the pretension and rotation angle of screws in screwed joints have a nearly synchronous trend, therefore, the loosening of screw rotation is the main reason for the reduction of pretension. 2) The simulation results show that the change in pretension of the mounting screws on the mirror base has a significant impact on the optical axis drift, while the change in pretension of the mounting screws on the mirror has a relatively minor impact on the optical axis drift. Therefore, in the actual production process, special attention should be paid to the anti loosening of the mounting screws on the mirror base; The simulation results and experimental results of the effect of the change in pretension of the mirror base’s mounting screw on the drift of the first mirror are within 10%, which verifies that the change in pretension of the screw will have an impact on the optical axis drift. 3) The simulation model has verified that fine-pitch screws have better anti loosening performance compared to coarse-pitch screws、increasing the friction coefficient of the thread contact surface and the friction resistance of the support surface can improve the vibration anti loosening performance of screwed joints、the thread glue has a significant effect on improving the vibration anti loosening performance of the thread connection, these further reflect the accuracy and practicality of the simulation model. The research results reveal the mechanism by which the pretension of screwed joints affects the stability of the optical axis of infrared imagers, and have practical guiding significance for improving the reliability of screwed joints to ensure the optical axis vibration stability of infrared imagers.
Aug. 25, 2024Vol. 53 Issue 8 20240197 (2024)
Yuhang DAI, Qiao LIU, Di YUAN, Nana FAN, and Yunpeng LIU
ObjectiveSince infrared images have limitations such as low resolution and limited target texture details, it is crucial to learn strong discriminative feature representation. In the current field of infrared target tracking, there is a shortage of large-scale infrared tracking training datasets. The largest infrared tracking training dataset in the tracking benchmark is currently LSOTB-TIR, which consists of 650 000 trainable video frames. This dataset partially addresses the issue of insufficient labeled infrared data. However, its size is still significantly smaller compared to visible light mode tracking datasets such as LaSOT, GOT-10k, and TrackingNet, which contain 2.8 million, 1.4 million, and 14 million trainable video frames, respectively. As a result, most existing deep learning-based infrared target tracking methods follow a common approach of pre-training on large-scale visible light data and fine-tuning on small-scale infrared data. However, this complete fine-tuning method becomes prohibitively expensive when training a Transformer tracker with a large number of parameters, which poses limitations for researchers and users with limited resources to explore and apply large-scale models.MethodsTo address this issue, this paper proposes an adaptive infrared target tracking algorithm that is efficient in terms of parameters, memory, and time. Firstly, it performs joint feature extraction and relationship modeling on the template and search area images using the self-attention mechanism of the Transformer. This process yields feature representations that are more closely associated with the target. Secondly, a low-rank adaptive matrix is employed in a side network to decouple trainable parameters from the backbone network. This reduces the parameter size that needs training and updating. Finally, a lightweight spatial feature enhancement module is designed to improve the feature's ability to discriminate between targets and backgrounds.Results and DiscussionsThe proposed method achieves superior performance while requiring significantly less training parameters, memory, and time compared to the full fine-tuning method (Tab.2). Specifically, the training parameters, memory, and time of the proposed method account for only 0.04%, 39.6%, and 66.2% respectively. Experimental comparisons and ablation experiments conducted on three standard infrared tracking datasets, namely LSOTB-TIR120, LSOTB-TIR100, and PTB-TIR, confirm the effectiveness of the proposed method. On the LSOTB-TIR120 dataset, the proposed method achieves a success rate of 73.7%, an accuracy of 86.0%, and a normalized accuracy of 78.5% (Fig.5). Similarly, on the LSOTB-TIR100 dataset, the success rate is 71.6%, the accuracy is 83.9%, and the normalized accuracy is 76.1% (Tab.1). Furthermore, on the PTB-TIR dataset, the success rate is 69.0% and the accuracy is 84.9% (Fig.6), demonstrating state-of-the-art tracking performance.ConclusionsIn response to the high cost of fully fine-tuning Transformer trackers using infrared tracking datasets, this paper presents an efficient parameter, memory, and time migration algorithm for infrared target tracking. Built upon a Transformer-based tracker, the proposed algorithm leverages the self-attention mechanism of the Transformer to simultaneously perform feature extraction and relationship modeling on template and search images, aiding the model in extracting target-relevant information. Additionally, a low-rank side network (LSN) is designed to decouple trainable parameters from the large Transformer backbone network, significantly improving model training efficiency. Furthermore, a spatial feature enhancement (SFE) module is introduced to enhance the model's discriminative ability towards targets and complex backgrounds by spatially augmenting the information collected by the LSN. Experimental results on three datasets, LSOTB-TIR-120, LSOTB-TIR-100, and PTB-TIR, demonstrate the superiority of the proposed algorithm over other methods. To further enhance model training efficiency, the LSN is designed as a composition of multiple low-rank linear matrices, but it doesn't address the issue of the Transformer tracking model's limited ability to capture local spatial information. Future work will incorporate a spatial prior information module to improve the model's discriminative ability towards local spatial information.
Aug. 25, 2024Vol. 53 Issue 8 20240199 (2024)

Xiying HUANG, Xuhui ZHANG, Yu HUANG, Tao LI, Lei SONG, and Peizhen LIU
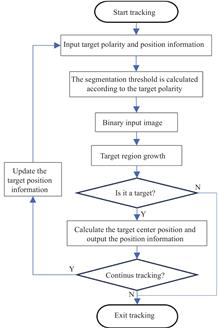
ObjectiveWith the rapid development of semiconductor devices, autonomous and controllable domestic multi-core heterogeneous FPGA devices have been vigorously promoted and applied in various fields, which has also promoted the development of optoelectronic information processing field. Infrared target detection and tracking technology has gradually become a key technology in this field. In the current photoelectric system, the principle design of airborne infrared target detection and tracking algorithm and its real-time improvement based on different hardware platforms have become a research focus. Domestic heterogeneous FPGA platform combined with multi-core ARM processor and FPGA logic resources, has strong system performance, flexibility and scalability, and becomes the preferred hardware platform for strong real-time processing system. Aiming at the problem of aerial infrared target acquisition and guidance in high-frame-rate and strong real-time photoelectric system, the architecture and implementation method of an aerial infrared target detection and tracking system based on domestic heterogeneous FPGA platform is proposed.MethodsA domestic heterogeneous FPGA-based aerial infrared target detection and tracking system is built in this paper. Based on AXI4 bus protocol, the methods of modularization and software and hardware collaborative design are adopted to construct the system architecture and the video pipeline (Fig.3). Median filtering was implemented by parallel pipeline processing (Fig.4). A fast aerial target detection algorithm based on background suppression is proposed through weighted two-dimensional spatial filtering pipeline processing (Fig.5 and Fig.6), and deployed in FPGA logic resource (PL) together with median filtering. The detection results are transmitted to the aerial target tracking module deployed on the FPGA processor (PS) in real time to complete the target tracking. Meanwhile, all functional modules of the system are controlled by PS. According to the series or parallel implementation method of each function module, the whole heterogeneous system is completed by overall deployment (Fig.8).Results and DiscussionsThe domestic heterogeneous FPGA-based aerial infrared target detection and tracking system is deployed on the hardware platform with Fudan Micro JFMQL100TAI heterogeneous FPGA chip as the core processing device. The logical resource occupancy rate of the whole system is less than 25%(Fig.10). Median filtering realizes image noise suppression and improves image quality (Fig.12). For different changes of target size, shape, pose and environmental interference such as thin cloud, the system can achieve accurate detection and stable tracking of the target (Fig.13 and Fig.14). At the same time, the function of this system is deployed on the three mainstream embedded domestic platforms for comparison. The experimental results demonstrate that the construction time of this system is the shortest, only 7.8 ms/ frame, and the system delay is 2 frames, forming the best solution to realize target detection and tracking based on heterogeneous FPGA. It can meet the requirements of 1280×1024@100 video real-time processing (Tab.1).ConclusionsThe domestic heterogeneous FPGA-based aerial infrared target detection and tracking system, which is based on AXI4 bus protocol, adopts the methods of modularization and software and hardware collaborative design to construct the system architecture to realize target detection and tracking and the whole system control. The deployment and implementation methods of the main functional modules of the system on domestic heterogeneous FPGA hardware platform are described. This system can realize real-time detection and stable tracking of infrared aerial target in 1280×1024@100Hz video, with the resource occupancy was less than 25% and the system delay was less than 2 frames. Therefore, this system can meet the requirements of high frame frequency and strong real-time photoelectric system. The realization of this system is an important exploration for the engineering application of domestic autonomous controllable heterogeneous FPGA core chip.
Aug. 25, 2024Vol. 53 Issue 8 20240263 (2024)
Jianing PENG, Xue HAN, Xiaolu NIE, Xiang GAO, Zhanda ZHU, Hong LEI, and Qiang LI
ObjectiveAt present, LD pumped Er3+/Yb3+ co-doped glass/crystal passively Q-switched microchip laser is widely used in laser ranging and lidar. With the increase of laser output repetition rate, glass has a serious thermal effect problem. The thermal conductivity of crystal is more than 10 times that of glass, which can achieve higher repetition rate. This article reports a 100 kHz human eye safe laser pumped by an LD pulse end face in Er3+/Yb3+: Lu2Si2O7 crystal. By optimizing experimental parameters such as pump spot size, pump duty cycle, and initial transmittance of Q-switched crystals, a repetition rate of 100 kHz and a single pulse energy of 0.7 μJ were obtained. A 1 537 nm pulsed laser output with a pulse width of 240 ns and a beam quality of M2=1.61. Finally, the consistency between the output pulse frequency and the pump has been achieved, ensuring the stability of the output repetition frequency and effectively solving the problems of randomness, instability, and uncontrollability of the output repetition frequency.MethodsIn this study, the factors that affect the output of LD end pumped passively Q-switched laser include crystal doping concentration and length, pump beam diameter, initial transmittance of saturable absorber and output coupling mirror (OC) transmittance. Under the theoretical simulation, the general optimization range of the above parameters was obtained, and the optimal parameters were obtained through the experiment. The optimal doping concentration of Yb3+ and length of Lu2Si2O7 crystal were obtained by comparing the free oscillating output power at different OC transmittance. In order to achieve the repetition frequency of 100 kHz Q-switched pulse laser output, we used the control variable method to optimize the pump beam diameter, initial transmittance of saturable absorber and OC transmittance, and obtained the best experimental parameters by comparing the output frequency and single pulse energy.Results and DiscussionsThe results of free oscillating were shown (Fig.2), the output power of 0.5at.%Er3+/4.0at.%Yb3+: LPS was always higher than 0.5at.%Er3+/5.0at.%Yb3+: LPS with the transmittance of the OCs changing from 8% to 30%. And when the length of medium increased, the output power of free oscillation also decreased. According to the experimental result (Fig.3), 2-mm-thick LPS was selected for passive Q-switched experiment. In order to achieve the repetition frequency of 100 kHz Q switched pulse laser output, we compared the repetition frequency, energy, pulse width of three sets of control variable experiments, the results were shown (Tab.1-3). Finally, the laser output with repetition frequency of 100 kHz, single pulse energy of 0.7 μJ, pulse width of 240 ns and M2=1.61 was obtained when the pump beam diameter is 130 μm, the initial transmittance of Co2+: MgAl2O4 was 99% and transmittance of OC was 10%.ConclusionsLD pulse end-pumped passively Q-switched 1537 nm laser with Er3+/Yb3+: Lu2Si2O7 crystal at 100 kHz was reported.In this experiment, the doping concentration of LPS crystal was optimized by the free oscillation experiment and the 2-mm-thick 0.5at.%Er3+/4.0at.%Yb3+: LPS was selected for passive Q switching experiment. Secondly, By optimizing the size of the pump spot and passively Q-switching the initial transmittance of the crystal, the output efficiency of the laser can be improved. At the same time, combining the characteristics of LPS crystals with longer upper level lifetimes, the pulse width is appropriately shortened, the pump duty cycle is optimized, and the output repetition rate stability is improved. Finally, in the case of using a 976 nm wavelength LD pulse laser, a laser pump repetition rate of 100 kHz was used, with a power of 2.7 W and a pulse width of 3 μs. Obtained an output repetition rate of 100 kHz and a single pulse energy of 0.7 μJ. A 1 537 nm laser output with a laser pulse width of 240 ns and a beam quality factor of M2=1.61. The consistency between the output and pump repetition rates has been achieved, ensuring the stability of the output repetition rate and effectively solving the problems of randomness, instability, and uncontrollability of the output repetition rate.
Aug. 25, 2024Vol. 53 Issue 8 20240168 (2024)

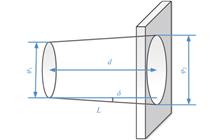
Weiyuan WU, Bin DENG, Taoyong WANG, Wangshuo CUI, Heng ZHAO, Chen ZHU, and Boning HE
ObjectiveShield method is a common method for subway tunnel excavation. In shield construction, the segment assembly process is mostly completed by manual operation. In the case of complex motion conditions of segment erector, manual operation of the erector seriously affects the efficiency and quality of segment assembly, and brings hidden dangers to safety construction. Therefore, it is necessary to realize the automatic assembly of shield segments, and improve the efficiency and accuracy of assembly, so as to speed up the tunneling speed and improve the safety of tunnel construction. Determining the position and pose of the target segment is the premise of realizing the automatic assembly of segments. At present, relevant researchers have proposed some shield segment positioning schemes based on vision or line laser sensors. However, these algorithms need to manually arrange the target on the shield segments or know the geometric size of the shield segments in engineering applications, which have high requirements for target layout and segment production. As a result, additional operation procedures and inevitable shield segment assembly errors are brought. Aiming at the problems of segment position and pose detection in the automatic shield segment assembly, a scheme of shield segment automatic assembly without marking segments in advance and suitable for unknown geometric parameters is proposed, and the segment position and pose detection algorithm is derived, which provides an effective technical solution for the segment position and pose detection in the automatic shield segment assembly engineering.MethodsThe installation layout of five line laser sensors, which are utilized to measure the position and pose of shield segments and the segment assembly process are reasonably designed. Specifically, these sensors, installed on the grasping plate of the end effector of the assembly robot are used to illuminate the straight and arc edges of the segments respectively, and the 3D coordinates of the deflection points generated by the line laser irradiation on the segment edges are detected. The position and pose of the segments with respect to the base coordinate system of the assembly robot can be calculated gradually during the assembly process, and then the position and pose of the end effector of the robot with respect to the base coordinate system can be calculated when the robot assembles the segment to the desired pose, so as to realize the automatic assembly of the segments.Results and DiscussionsIn the laboratory environment, the line laser sensor (OPT-LPB400) and the 6-DOF series robot (INOVANCE-IRS311-7-70TS5) are used to build the experimental platform for automatic segment assembly. In order to verify the effectiveness of the segment position and pose detection algorithm, an automatic segment assembly experiment is carried out on the platform. The experimental results show that the proposed shield segment automatic assembly method shows a small error in segment positioning, and the maximum level difference of segment assembly is 1.50 mm, and the maximum gap is 0.96 mm, which meets the engineering requirements.ConclusionsAn automatic shield segment assembly method based on five line laser sensors is proposed. This method does not need to mark the segments in advance, and the shield segments can be assembled automatically even when the geometric parameters of the shield segments are unknown, which is simple and reliable. The Savitzky-Golay (SG) filter algorithm is used to smooth the line laser profile data The automatic detection of segment edge point coordinates, based on curvature characteristics, is then realized, enabling the automatic detection of segment assembly pose. The segment assembly process is designed. The position and pose detection algorithm in the shield segment assembly process is derived according to the process. Only the three-dimensional coordinates of the deflection points illuminated by the line laser sensors on the edges of the shield segments were used to detect the position and pose of the shield segments, and then the desired assembly position and pose of the end-effector of the assembly robot were determined. The experiments of automatic segment assembly show that the proposed automatic shield segment assembly method realizes the automatic assembly of shield segments under laboratory conditions. The maximum level difference is 1.50 mm, and the maximum gap is 0.96 mm, which meets the engineering requirements of segment assembly. This method provides an effective technical solution for the automatic assembly of shield segments.
Aug. 25, 2024Vol. 53 Issue 8 20240177 (2024)
Hongsheng QUAN, Weifeng MA, Zan TANG, Zongquan ZHANG, Changjun JIN, Lirong QIU, Kemi XU, and Weiqian ZHAO
ObjectiveIn order to realize ultrafast laser microdevice processing with high efficiency and flexibly adjustable processing accuracy, an ultrafast laser processing method based on tunable Bessel beam is proposed in this paper. This method achieves flexible adjustment of the central lobe radius and maximum nondiffracting propagation distance of the ultrafast laser Bessel beam by adjusting the compression ratios of the double telecentric optical system that can compress the primary Bessel beam, in which the double telecentric optical system with different compression ratios is realized by the control of the high-resolution displacement voice coil actuator with a closed-loop feedback control. Theoretical analyses and experimental tests confirm that the central main lobe radius and the maximum nondiffracting propagation distance of ultrafast laser Bessel beams are 3.73 μm and 5.28 mm, 1.86 μm and 1.32 mm, 0.93 μm and 0.33 mm, respectively, with the cooperation of a axicon lens (base angle of 2°) and a double telecentric optics system (f1 = 250 mm, f2 = 36 mm, 18 mm, and 9 mm). Meanwhile, a Bessel beam detection system is designed to realize the accurate measurement of the tunable Bessel beams designed above.MethodsThe flexible adjustment of Bessel beam parameters can be realized by combining the axicon lens with a double telecentric optical system with different beam compression ratios. This adjustment is controlled by the high-resolution displacement voice coil actuator with a closed-loop feedback control. Meanwhile, theoretical calculation and numerical simulation are carried out to get the Bessel spatial light distribution of the Gaussian beam passing through the axicon lens and the double telecentric optical system with different beam compression ratios. In addition, a Bessel beam monitoring optical system was constructed by using a beam quality analyzer and a motion guide, and the above adjustable Bessel beam was tested.Results and DiscussionsThe simulation analysis and experimental results indicate that the incident Gaussian beam passing through an axicon lens (base angle of 2°) and a double telecentric optical system (f1 = 250 mm, f2 = 36 mm, 18 mm, and 9 mm) results in a Bessel beam, with respective the central main lobe radius and maximum nondiffracting propagation distance denoted as 3.73 μm and 5.28 mm, 1.86 μm and 1.32 mm, 0.93 μm and 0.33 mm, respectively. The double telecentric optical system with different compression ratios is realized by the control of the high-resolution displacement voice coil actuator with a closed-loop feedback control.ConclusionsIn this paper, a tunable ultrafast laser Bessel beam processing system is designed and constructed. The theoretical analysis and simulation of the spatial light field propagation characteristics of the Bessel beam generated by the ultrafast laser through the axicon lens and different double telecentric optical systems are performed, and comparative analyses are carried out, in which different compression ratios of the double telecentric optical system are controlled by the high-resolution displacement voice coil actuator with a closed-loop feedback control. The designed Bessel processing system can be flexibly switched according to the characteristics of the samples. Then, the central main lobe radius and maximum nondiffracting propagation distance of the Bessel beam are experimentally tested using the self-constructed beam detection device, and the experimental results are consistent with the theoretical design. Finally, perforation experiments were carried out on fused silica samples with a thickness of 1 mm, and the results show that the system can realize the ultrafast laser microdevice processing with high precision, high efficiency and flexible adjustment of processing accuracy.
Aug. 25, 2024Vol. 53 Issue 8 20240185 (2024)
Xiang LI, Dongyu WU, Ziting SUN, Liang GAO, Yan AN, Yansong SONG, and Keyan DONG
ObjectiveWith the widespread development of laser technology, lasers are now extensively used in various fields such as industry, medicine, and the military. Optical antennas play a crucial role in high-energy laser transmission, and their thermal deformation has a significantly greater impact on the overall wavefront aberration than other components in the optical path. Compared to Cassegrain antennas, off-axis optical antennas have a higher level of analytical difficulty due to their parabolic mirrors rather than flat mirrors. Current research on the thermal stability of off-axis optical antennas mainly focuses on the steady-state thermal analysis of temperature variations in space. The issues of surface shape changes of the primary and secondary mirrors under transient thermal loads of high-energy lasers and the resultant changes in the distance between these mirrors also need to be addressed. Presently, there are few integrated analytical models that study the increase in wavefront aberration in off-axis optical systems caused by photothermal effects from high-energy lasers. This study focuses on off-axis two-reflector optical antennas, analyzing the changes in wavefront aberration in off-axis optical systems due to photothermal effects induced by high-energy lasers.MethodsAn off-axis two-reflector optical system finite element analysis model was established under the environment of high-energy laser operation. Transient thermal analysis and static analysis under laser loading were completed, and the displacement cloud map varying with laser loading time was obtained. The rigid body displacement of the off-axis primary and secondary mirrors was solved using homogeneous coordinate transformation. The wavefront fitting of the mirrors was completed using Zernike polynomial fitting. The change along the Z-axis in the rigid body displacement of the mirrors and the Zernike polynomial coefficients were imported into ZEMAX. The thermal analysis results of the off-axis two-reflector optical system were obtained under laser loading with an average power of 1000 W, a repetition frequency of 0.2 Hz, and an incident light diameter of 30 mm for 300 seconds.Results and DiscussionsBased on the node data of the off-axis two-mirror surface deformation analyzed by the software, the rigid body displacement values of the primary and secondary mirrors were obtained using the least squares method (Fig.6). The wavefront aberration of this off-axis two-reflector optical system is mainly caused by the surface shape errors of the components. By fitting the deformation nodes with Zernike polynomials, the first nine Zernike polynomial coefficients were obtained (Fig.7). The values of the Zernike coefficients for the primary mirror were smaller than those for the secondary mirror, indicating that the surface shape of the primary mirror is better than that of the secondary mirror under laser irradiation. The absolute values of the system's coefficients were positively correlated with the main laser loading time. After 300 seconds of 1000 W laser irradiation, the system's wavefront aberration RMS was 0.0646λ (Fig.8). Using the same method, simulation analysis showed that after 30 minutes of 10 W laser irradiation, the system's wavefront aberration RMS was 0.0583λ (Fig.9). Experimental verification of the wavefront aberration changes in the off-axis two-reflector antenna under these conditions showed that the system's wavefront aberration RMS was 0.063λ after 30 minutes of 10 W laser irradiation (Fig.10). The error between the simulation results and the experimental results was 7.46% (Tab.4), indicating that the simulation results obtained by this analysis method have reference value.ConclusionsFocusing on the off-axis two-reflector optical antenna, an analysis model was established for the off-axis two-reflector optical antenna under the transient thermal load of a 1 000 W high-power laser. The changes in the rigid body displacement and surface shape of the primary and secondary mirrors with increasing laser loading time were analyzed, quantifying the impact of high-power laser thermal effects on the image quality degradation of the off-axis two-reflector optical antenna. The analysis results showed that after 300 seconds of1000 W laser transmission, the RMS wavefront aberration of the off-axis optical antenna deteriorated to 0.0646λ, and the PV value increased by 0.2664λ. Using microcrystalline glass as the material, the off-axis two-reflector antenna maintained good image quality under 1 kW laser irradiation. Using the same analysis method, the simulation results of the off-axis two-reflector optical antenna under 10 W loading showed an RMS wavefront aberration deterioration of 0.058λ. Experimental verification with 10 W laser irradiation showed an RMS wavefront aberration of 0.063λ, with a simulation deviation of less than 7.93%. This analysis model and its results provide valuable references for assessing the direct relationship between high-energy laser transmission time and image quality degradation in off-axis two-reflector optical antennas.
Aug. 25, 2024Vol. 53 Issue 8 20240187 (2024)
Mingjiao WANG, Qianqian HUANG, Weixi LI, Haochen TIAN, Zinan HUANG, and Chengbo MOU
ObjectiveU-band (1625-1675 nm) high repetition rate mode-locked fiber lasers have broad applications in expanding communication bands, methane and gas detection, photon microscopy, coherent Doppler lidar, and ocular surgery. At present, actively mode-locked fiber lasers based on SSFS can achieve 10 GHz U-band pulse output, but the high repetition rate U-band based on nonlinear polarization rotation (NPR) passively mode-locked has not been broken through. Passively harmonic mode-locking (HML) based on the soliton self-frequency shift (SSFS) is an effective approach for achieving high repetition rate pulses in the U-band. It is of great significance for practical applications.MethodsA passively HML fiber laser system based on SSFS has been constructed (Fig.1). Initially, a passively HML fiber laser based on NPR is constructed as the seed source. Through a cascaded two-stage amplification system, the output power is amplified up to 1.7 W. Subsequently, the amplified pulses are input into a section of dispersion-shifted fiber (DSF) with anomalous dispersion, where the SSFS effect is stimulated to shift the central wavelength to the U-band. The residual part of the seed source is filtered out by a long pass filter (LPF), thereby achieving U-band passively HML pulse output. For the first time, a GHz pulse output with a wavelength that can cover the entire U-band range has been achieved using an NPR passively HML fiber laser as an SSFS effect seed source.Results and DiscussionsRepetition rate tuning of the seed source is achieved by adjusting the pump power and the polarization controller (PC). As the pump power increases from 31 mW to 862 mW, the laser source operates at harmonics spanning from 1st to 39th, corresponding to repetition rate ranging from 31.39 MHz to 1224.2 MHz (Fig.2). Three different repetition rate pulses (722.0 MHz, 941.7 MHz, 1224.2 MHz) are selected to be shifted to the U-band via SSFS, and the influence of pulse repetition rate on SSFS is investigated (Fig.3, Fig.4, Fig.7). Finally, a tunable high repetition rate U-band passively HML fiber laser is realized, covering the entire U-band wavelength range. When comparing the pump power required for the main amplifier to shift to the U-band (~1630 nm) at different repetition rates, it is observed that the required pump power varies. The required pump power is 4.2 W, 4.4 W and 4.0 W at repetition rate of 722.0 MHz, 941.7 MHz and 1224.2 MHz, respectively. At 722 MHz, the required pump power is 4.2 W, at 941.7 MHz it is 4.4 W, and at 1224.2 MHz it is 4.0 W. Notably, when the repetition rate is 1224.2 MHz, the required pump power decreases. This is due to the relatively weak Kelly sideband strength in the seed source. As a result, higher amplification efficiency is achieved, leading to a reduced pump power requirement for frequency shifting to the same wavelength. And since the states with repetition rates of 722 MHz and 1224.2 MHz accumulate excessive nonlinearities during the amplification process, the second-order Raman soliton thresholds are lowered, and the optical spectrum after SSFS shows double peaks in the U-band.ConclusionsA U-band passively HML fiber laser based on NPR mode-locking technology has been realized with a repetition rate tuned up to 1 GHz and a wavelength tuning range covering the entire U-band. The conditions for achieving SSFS at different repetition pulse rates (722.0 MHz, 941.7 MHz, 1224.2 MHz) are systematically discussed, along with the influence of the Kelly sidebands from the seed source under different states. Under unchanged conditions, higher repetition rates require higher pump power for the main amplifier to achieve frequency shifting into the U-band. However, excessively strong Kelly sidebands from the seed source would reduce the amplification efficiency.
Aug. 25, 2024Vol. 53 Issue 8 20240241 (2024)
Jia LI, Qiang CHENG, Xiaokun WANG, Haixiang HU, Longxiang LI, Hongshi LI, Donglin XUE, and Xuejun ZHANG
Significance As the performance of optical systems is becoming more and more demanding, complex optical surfaces such as aspheres and free-form surfaces can improve the imaging performance of the system, so it is extremely important to improve the detection accuracy of complex optical surfaces. Interference detection is an important means of measuring complex optical surfaces, and Computer Generated Holograms (CGH), as one of the interferometric detection methods, has been widely used due to its high accuracy and large degree of design freedom. However, the various types of errors existing in the process of CGH detection of complex surfaces will affect the accuracy of wavefront detection. The significance of Computer-Generated Holograms (CGH) in optical surface metrology lies in its transformative potential to achieve unparalleled precision and efficiency in measuring complex surface profiles. Traditional metrology methods often face limitations in accuracy and versatility, particularly when dealing with intricate geometries and microscopic features. In contrast, CGH offers a non-contact, high-resolution approach that promises to revolutionize metrology across various industries, including semiconductor manufacturing, aerospace engineering, and biomedical sciences.Progress In the development of Computer Generated Holograms (CGH) technology, the study and management of errors play a crucial role. CGH technology is capable of high-precision surface measurements and morphology reconstruction by utilising the principles of computational optics. However, how to effectively identify, understand and minimise errors is crucial to ensure measurement accuracy. In recent years, researchers have focused on addressing the various sources of error that can exist in CGH systems, which include, but are not limited to, non-uniformities in the optical system, environmental factors (e.g., vibration and temperature variations), and the accuracy of the algorithms themselves. Through systematic error analyses and corrections (Fig.2), researchers have continued to improve the algorithms and hardware designs in order to enhance the stability and measurement accuracy of the CGH system. Specifically, research advances have shown that novel error compensation techniques and advanced data processing algorithms have significantly improved the CGH system's ability to measure complex surfaces. These techniques, including model-based correction methods and real-time feedback control systems, can effectively reduce system errors and improve measurement accuracy and repeatability. Future research directions will further focus on improving the ability of CGH systems to measure surfaces at tiny scales and under non-ideal conditions, such as applications in high or very low temperature environments. In addition, with the advancement of computing power and optical technology, more adaptive error correction methods based on machine learning and artificial intelligence are expected to emerge, which will open up new possibilities for the wide application of CGH technology in industrial production and scientific research.ConclusionsThe results presents findings related to each category of CGH errors identified in the study. It discusses the specific mechanisms contributing to design, encoding, and manufacturing errors, supported by relevant literature and experimental data. The section also includes case studies and comparative analyses of calibration methods used to mitigate these errors in practical applications. Discussions expand on the implications of error reduction strategies for improving the accuracy of CGH-based interferometric measurements in various optical testing scenarios. Furthermore, the section examines the limitations of current methodologies and proposes potential avenues for future research aimed at advancing CGH technology in optical surface metrology. In conclusion, the study synthesizes the key findings regarding CGH errors and their impact on measurement accuracy in optical surface metrology. It summarizes the significance of addressing design, encoding, and manufacturing errors to enhance the performance of CGH-based interferometric systems. The conclusions highlight the effectiveness of calibration techniques in minimizing error propagation and improving measurement reliability. Additionally, the section outlines future research directions, emphasizing the need for continued innovation in CGH technology to meet evolving demands in high-precision optical manufacturing and metrology.
Aug. 25, 2024Vol. 53 Issue 8 20240135 (2024)
Zhe MA, Weizhe LI, Jianzhong ZHANG, Jian LI, Tingyu WANG, Xiang HE, Binyuan YANG, and Mingjiang ZHANG
Distributed optic-fiber vibration sensing (DVS) system enables distributed measurement of vibration signals. Despite the prevalent utilization of pattern recognition algorithms in practical applications to discern various vibration events, extant pattern recognition features often exhibit fixity and redundancy, thereby inadequately capturing the nuanced characteristics of vibration signals, resulting in a pronounced false alarm rate challenge. This study presents a prototype of a direct detection structure DVS system devised to confront the issues above. Also, a hybrid feature selection methodology is proposed here, integrating the simulated annealing algorithm with the Fisher Score algorithm. Initially, the Fisher Score algorithm is employed to identify an apt initial feature set, subsequently integrating the Fisher Score into the new solution generation phase of the simulated annealing algorithm to optimize the overall efficacy of the feature amalgamation for intrusion vibration signals. Experimental validation of the algorithm underscores its capability to obviate redundant intrusion signal features, evince rapid convergence, and elevate the system's recognition rate from 80.23% to 94.46%.ObjectiveThe distributed fiber-optic vibration event recognition system comprises two key components of the distributed fiber-optic vibration sensing (DVS) system and the vibration event recognition module. This system is highly effective for locating vibration events and has garnered significant attention in applications such as perimeter security, pipeline leakage detection, and earthquake monitoring. In the studies on pattern recognition of intrusion vibration signals collected by DVS, it is essential to handle large volumes of high-dimensional feature vector data, where each component represents a specific characteristic of the data. However, existing pattern recognition features are often fixed and redundant, with some algorithms failing to address the core problem effectively, leading to a high false alarm rate. To enhance pattern recognition accuracy, it is crucial to eliminate irrelevant and redundant features from these high-dimensional vectors and identify the features critical to solving the problem. This article proposes a feature selection algorithm designed to improve the recognition rate of DVS vibration signals.MethodsThis study constructs a prototype of a distributed fiber-optic vibration sensing system (Fig.1) and introduces a hybrid feature selection method combining the simulated annealing algorithm with the Fisher Score algorithm (Fig.2). Initially, the Fisher Score algorithm is used to select an appropriate initial feature set. Subsequently, the Fisher Score is embedded into the new solution generation stage of the simulated annealing algorithm to optimize the feature combination for intrusion vibration signals.Results and DiscussionsThe time-domain characteristics of four types of vibration signals—shear, tapping, shaking, and climbing—were analyzed (Fig.4-5, Tab.1). The algorithm optimization results for two sets of data each for cutting and tapping, as well as shaking and climbing, are presented (Tab.2). The relationship between the fitness values and iteration times of feature subsets selected by different methods on two datasets (Fig.6-7). A comparative analysis of the fitness values for different numbers of features revealed that the highest fitness value,0.9466, was achieved when selecting 10 features (Fig.8). The proposed method demonstrates significant advantages in feature selection, efficiently removing redundant features from the dataset.ConclusionsTo address the high false alarm rate in DVS systems used for perimeter security, pipeline leakage detection, and long-distance monitoring, this paper introduces a hybrid feature selection algorithm combining the simulated annealing and Fisher Score algorithms. Experiments on various vibration signals collected by DVS prototypes validate the algorithm. The maximum fitness values of different feature numbers were compared with traditional methods, demonstrating the proposed algorithm's superior performance and faster convergence in removing redundant features. This algorithm significantly improves the recognition rate of DVS systems, offering a valuable solution for reducing the false alarm rate of DVS vibration signals.
Aug. 25, 2024Vol. 53 Issue 8 20240193 (2024)
Yan FAN, Qiao LIU, Di YUAN, and Yunpeng LIU
ObjectiveInfrared and visible image fusion is one of the primary branches of image fusion tasks. It can merge images captured from different scenes and sensors into a fused image, which simultaneously possesses complementary information and image features from both infrared and visible images. However, existing fusion methods exhibit the following shortcomings. Firstly, the core idea of feature fusion strategies lies in weighting or convolution, failing to explicitly consider the contextual relationship between multiple modalities. Secondly, due to the local modeling characteristics of convolutional neural networks, these methods cannot effectively model the global contextual information between infrared and visible images. Lastly, most fusion methods still only perform feature extraction, fusion, and reconstruction operations on source images in the spatial domain, lacking exploration of modeling global contextual information in the frequency domain. Therefore, this paper proposes an infrared and visible image fusion algorithm based on spatial and frequency domain feature decoupling to address the limitations.MethodsThis paper proposes an end-to-end encoder-decoder network architecture for image fusion, which is composed of three key modules to effectively decouple and fuse the high and low-frequency information of source images(Fig.1). Firstly, a circular frequency mask with a radius of r is designed in the frequency domain decoupling branch, which can effectively disentangle the high and low-frequency information representations of source images in the Fourier domain, thus comprehensively capturing the global contextual information of source images. Then, the spatial domain decoupling branch contains two parallel reversible neural network modules and a lightweight Transformer module. These two modules work independently, responsible for decoupling the high and low-frequency information representations of source images in the spatial domain, and capturing the local contextual information of source images. Finally, after successfully decoupling the high and low-frequency information representations of source images, a multi-spectral convolutional attention fusion network is designed. This network fully utilizes multi-spectral channel attention and spatial attention mechanisms to effectively capture the detailed information of different modal images, and simulate the contextual relationship between high and low-frequency information representations, achieving complementary interactive fusion of high and low-frequency information representations. Results and DiscussionsIn the comparison between the method mentioned in the text and RFN-Nest, SwinFusion, SDNet, U2Fusion, DenseFuse, FusionGAN, and DATFusion, the method achieved 5 firsts, 2 seconds, and 1 third on the TNO dataset (Tab.1). In the RoadScene dataset, it achieved 5 optimal and 2 suboptimal performances (Tab.2). In the MSRS dataset, except for achieving the suboptimal performance in mutual information (MI), it reached the optimal level in the other seven indicators (Tab.3). The subjective evaluation indicators are shown (Fig.2-4), corresponding to the TNO, RoadScene, and MSRS datasets, respectively.ConclusionsThis paper proposes a network framework based on decoupling of spatial and frequency domain features, which is trained in an end-to-end manner to achieve efficient fusion of infrared and visible light images. Firstly, in the frequency domain branch, frequency masks are utilized to decouple the high and low frequency information representations of the source images in the Fourier domain. Meanwhile, in the spatial domain branch, two parallel reversible neural network modules and lightweight Transformer blocks are employed to decouple the high and low frequency information representations of the source images in the spatial domain. Then, a multi-spectrum convolutional attention fusion module is designed to achieve complementary interactive fusion of the high and low-frequency information representations. Finally, through comparative experiments and ablation experiments, it is shown that the proposed algorithm exhibits excellent competitiveness in qualitative and quantitative evaluations compared with recent deep learning-based fusion methods on the TNO, RoadScene, and MSRS datasets. It can effectively promote the fused image to retain more significant infrared thermal radiation information and visible light texture detail information.
Aug. 25, 2024Vol. 53 Issue 8 20240198 (2024)
Chenhao XIA, Xinwei WANG, Liang SUN, Bo SONG, Songtao FAN, and Yan ZHOU
ObjectiveThree-dimensional (3D) images provide a stereoscopic view enabling observers to perceive shapes, sizes, and spatial relationships. They play an important role in a variety of applications including computer vision, medical imaging, robotics, autonomous driving, graphics, virtual reality (VR) and augmented reality (AR). 3D range gated imaging (Gated3D) is a light ranging and imaging (LiRAI) technique, which can obtain high-resolution 3D spatial images as well as 2D intensity images, avoiding the heterogeneous data fusion problem in the combined technology of LiDAR and camera. Gated3D can utilize at least two gated images to recover depth information. Similar to existing LiDAR, Gated3D is also influenced by device noise, temporal characteristics, target reflectivity and background environment, which results in a low peak signal-to-noise ratio (PSNR) of 3D images, ultimately affecting practical applications. To improve the PSNR of the LiRAI based on Gated3D, we propose a trilateral filter smoothing and denoising algorithm.MethodsFor the gated LiRAI, the smoothing and denoising algorithm of trilateral filter utilizes spatial and range filtering in 3D images, as well as the grayscale value filtering in gated images. The trilateral filter is explained with the Eq.(1), and the spatial, range and gray-scale filtering are shown in Eq.(2)-(5). Compared to the traditional bilateral filtering algorithm, the trilateral filtering algorithm introduces grayscale value filtering. For depth maps with high noise recovered by the gated LiRAI, the proposed algorithm can preserve the object edge information while smoothing small-scale noise, even if two objects with different reflectance are relatively close together. After smoothing noise, the depth maps are transformed to point cloud, and the statistical outlier removal (SOR) algorithm is used to remove outliers in the point cloud.Results and DiscussionsThe trilateral filter algorithm is tested on both simulated data and real-world data. In the simulation experiment, we designed a pyramid-shaped depth map to simulate the smooth regions and edge regions. The original pyramid-shaped depth maps and their depth maps with different noise are shown in Fig.3. We test bilateral filter and trilateral filter algorithms by applying them to smooth the noise in the pyramid-shaped depth maps, and the PSNR of the whole depth map as well as the edge regions of the depth map are analyzed. The results are shown (Fig.5-6, Tab.1-2). Two diffuse targets with different reflectivity are used as the real-world test data in Fig.7, and a part of the data are selected for quantitative analysis in Fig.9. The results are shown in Tab.3. In both test datasets, the trilateral filter algorithm performs better than the bilateral filter algorithm especially in the edge regions. The result of real scene by the proposed algorithm are shown in Fig.10.ConclusionsWe propose a noise smoothing algorithm of trilateral filter to smooth noise in 3D images from gated LiRAI, and further combine the SOR filter algorithm to remove outliers in point cloud. The 3D images recovered by the LiRAI based on Gated3D are affected by noise, in which case the traditional noise smoothing algorithm such as the bilateral filter is unable to smooth the noise and preserve edges. The proposed algorithm can preserve the edges when the targets have different reflectivity, and performs better than the bilateral filter algorithm on both synthetic data and real-scene data.
Aug. 25, 2024Vol. 53 Issue 8 20240204 (2024)
Yan WANG, Tiantian YUAN, Bin HU, and Yao LI
ObjectiveIn the field of autonomous driving, high-precision object detection is crucial for ensuring safety and efficiency. A common approach is to use voxel-based methods, which are susceptible to the quantization grid size. Smaller grid sizes make the algorithm more computationally intensive, while larger grid sizes increase quantization loss, leading to the loss of precise position information and fine details. Successive convolution and down-sampling operations can further weaken the precise localization signals in the point cloud. To improve the orientation perception and accuracy of object detection, we propose a frustum transform-based method that uses RGB images to extract features and fuses them with distance information from LiDAR. This approach optimizes the strategy for extracting orientation features from the 3D point cloud. To reduce the model's dependence on annotated data, we also design a semi-supervised learning architecture that employs an adaptive pseudo-labeling method, thereby further reducing the false alarm rate of the group voting-based method.MethodsWe propose a LiDAR-RGB fusion network based on the frustum transform (Fig.1). Specifically, texture information is extracted from the RGB image by a deep network and fused with distance information from the LiDAR to maintain the integrity of the 3D spatial features (Fig.2). Subsequently, the weights of the voxel spatial features are optimized using the channel attention module (Fig.3). Finally, a semi-supervised learning architecture (Fig.4) is employed to reduce the false alarm rate by utilizing the spatial feature fusion module (Fig.5) and the group-based voting module. The comparative learning module is used to improve the reliability of the detection.Results and DiscussionsThe proposed method was evaluated on the KITTI dataset (Tab.1). Our method achieved 56.30% accuracy in pedestrian detection and 75.88% accuracy in vehicle detection, with a detection rate of 21 FPS. In the ablation study of the LRFN (LiDAR-RGB Fusion Network) model (Tab.2), the RVFM (RGB Voxel Feature Module) improved the accuracy in recognizing occluded objects (Fig.6-7). The channel attention module was analyzed in comparison with other fusion modules (Tab.3, Fig.8). In the semi-supervised learning experiments, the teacher model of this study was compared with the 3DIoUMatch model (Tab.4), and the results validated the effectiveness of our teacher model. In the ablation study (Tab.5), the baseline was improved by 8.61% using the full model. These results show a significant improvement over existing methods, highlighting the detection performance of the RVFM and the teacher model.ConclusionsIn this study, we propose a 3D object detection technique based on frustum transform and semi-supervised learning architecture. This method maps 2D image features to 3D space, generates homogeneous RGB image voxel features using LiDAR depth distribution information, adaptively selects the voxel space, and optimizes the fusion feature characterization capability through the Channel Attention Module. Finally, targets are detected using the 3D Region Suggesting Network Module. In the ablation experiments (Tab.2), the detection accuracy of the baseline model improved when using the RGB image feature module. The RVFM effectively solved the orientation and proximity problems in visual sample analysis (Fig.6-7). Additionally, the SFF (Spatial Feature Fusion) and GBV (Group-based Voting) modules were proposed to reduce the false alarm rate, and the comparative learning module was introduced to improve the consistency of output results from different views of the student model. The experimental results (Tab.1) show that the LRFN-S (LiDAR-RGB Fusion Network-SLL) method proposed in this paper achieved significant performance, with 75.88% and 56.30% accuracy on the KITTI dataset for automobile and pedestrian detection benchmarks, respectively.
Aug. 25, 2024Vol. 53 Issue 8 20240206 (2024)
Xiyuan LUO, Meng XIANG, Yanyan LIU, Ji WANG, Kui YANG, Pingli HAN, Xin WANG, Juncheng LIU, Qianqian LIU, Jinpeng LIU, and Fei LIU
Significance The rapid development of optical imaging and image processing technology has created an urgent need to improve optical image quality in many application areas. Images acquired in complex environments, such as those affected by atmospheric pollution or underwater imaging, are often degraded by haze, scattering, absorption, and other factors. These issues result in the loss of image details, reduced contrast, color distortion, and other problems, which in turn affect the visibility of the image and the ability to extract information. Optical image dehazing algorithms aim to recover real scene information from images affected by atmospheric illumination, improving visual quality and information. They provide clearer and more realistic image information for various application scenes, promoting scientific research and applications in related fields. In the future, as algorithm technology continues to innovate and optimize, the field of optical image processing will experience broader applications and deeper development.Progress This paper summarizes and organizes recent dehazing and clarity methods by classifying them into non-physical model-based, physical model-based, and deep learning-based methods. It elaborates on popular dehazing methods in each category. Non-physical model-based clarity algorithms aim to enhance the clarity and viewing quality of images through image processing techniques that enhance the local details and contour features of images. Clarity algorithms enhance the fine structure and texture information in images through local contrast, edge, and detail enhancement. This improves the three-dimensional and realistic appearance of images. Clarity algorithms have various applications in digital photography, medical imaging, and industrial inspection. They can improve the accuracy of image diagnosis and analysis, and promote the development of related fields. Secondly, physical model-based algorithms are used to simulate the propagation process of light in the atmosphere and infer the depth information of obscured objects. This suppresses the effects of haze and enhances the contrast and clarity of images. The main researches in this field include studies based on atmospheric degradation models and exploration of polarization imaging models based on scattered light fields. Various image dehazing methods have been proposed based on the theoretical foundation of the atmospheric degradation model. These methods aim to simulate the light propagation process in the atmosphere, separate the effects of haze, and recover the details and features of the original image. Examples of such methods include the dark channel a priori algorithm, the anisotropic scattering algorithm, and the all-variable denoising algorithm. The polarization imaging model comprehensively considers the formation mechanism of the haze image and estimates the target's multi-dimensional physical information. It combines with the atmospheric scattering imaging model to effectively restore the real scene image. Furthermore, deep learning technology has enhanced the image dehazing algorithm. The neural network's powerful feature extraction and learning capabilities enable the recovery of hidden target information by learning the mapping rules hidden in large-scale data collections, resulting in more optimal processing results. In the field of image dehazing algorithms, deep learning methods are applied not only to a single learning paradigm but also to a variety of model training strategies, including supervised, unsupervised, and semi-supervised learning.Conclusions and Prospects In recent years, researchers have paid significant attention to haze removal methods because of the widespread use of optical imaging technology in the fields such as video surveillance and traffic systems. The purpose of this paper is to conduct a systematic study of haze removal methods in recent years. To gain a deeper understanding of these methods, we classify them based on their algorithmic nature and characteristics. For each classification, we have selected the most representative methods to be characterized in detail. We have also introduced the recent development trends of these methods. Our aim is to provide a reference and support for future advances in image dehazing technology. Significant progress has been made in this field, and it has played an important role in the application of underwater dehazing and clarity imaging. However, there are still many issues and challenges that need to be addressed. In most dehazing methods, researchers typically use multiple independent metrics to evaluate their methods. Therefore, it is necessary to devise a unified method for assessing the quality of the images instead of relying on multiple metrics. Additionally, the literature study revealed that there is no effective method for dealing with different weather conditions. As a result, it is necessary to explore new methods based on image processing and deep learning, combining traditional algorithms with the advantages of neural networks to cope with a variety of complex weather conditions. Finally, the combination of deep learning and traditional image processing techniques is a relatively new approach that can optimize processing results to a certain extent. However, it also has some limitations, such as low fog removal efficiency and limited applicability. Additionally, the construction of the model is largely dependent on a specific dataset, and it is difficult to ensure that it can obtain a similar performance from other datasets. Therefore, future research should focus on the improvement and optimization of the training speed and robustness of the model.
Aug. 25, 2024Vol. 53 Issue 8 20240162 (2024)
Jingguo ZHU, Ye YUAN, Chenghao JIANG, Yu LIU, and Zhengwei ZHAO
Significance LiDAR detects targets by actively emitting and receiving lasers, obtaining information such as distance, speed, and orientation from the laser reflection echoes.It serves as a fundamental source for multi-dimensional environmental perception. In the context of detection systems, Time of Flight (TOF) LiDAR uses pulsed light signals to measure distances by precisely calculating the flight time of reflected light pulses. However, it has poor anti-interference, low detection sensitivity, and is susceptible to rain and fog, snow and other severe weather effects and other disadvantages; Frequency Modulated Continuous Wave (FMCW) combines continuous frequency modulation ranging in modern radar technology with laser detection technology. It uses linear frequency modulation signals to modulate the laser, and obtains target information by measuring the frequency of the beat frequency signal obtained by coupling the reflected signal and the local oscillator signal, because the coherent detection method can achieve a higher signal-to-noise ratio with lower laser emission power, making it a promising technology for future applications. In recent years, with the rapid development of silicon-based optoelectronic integration technology, on-chip integrated FMCW LiDAR, capable of integrated ranging, speed measurement, and high-precision long-distance detection, has become a research hotspot and has been used in fields such as intelligent driving, aerospace, target monitor, and public security.Progress In terms of scanning method, mechanical LiDAR uses mechanical rotation to achieve laser scanning, and uses a motor to drive the rotation of a single-point or multi-point ranging module. However, it is large in size, complex in assembly, and has a short lifespan, making it difficult to meet reliability and low-cost requirements. Dual-axis Micro-Electro-Mechanical Systems (MEMS) and transmissive poly-wedge prisms use single-point ranging combined with complex optical scanning systems. But face challenges such as limited detection range, poor environmental adaptability, and the inability to simultaneously improve angular resolution and scanning frame rate. The area array flash (Flash) is a non-scanning type. Area array flash LiDAR, a non-scanning type, outputs image information by receiving light speckles on the target. Despite its low cost and strong stability, its low emission energy density makes long-distance detection difficult, limiting its application scenarios. Thanks to the advancement of silicon-based optoelectronic integration technology, Optical Phased Array (OPA) has received widespread attention and rapid development. The solid-state beam forming and steering capabilities it provides play an important role in free-space applications and can simultaneously meet the requirements of detection field of view and resolution rate and scanning frequency requirements, it is the preferred solution to balance various core indicators, achieve low cost, high reliability and excellent performance at the same time, which is the mainstream development direction of all-solid-state and miniaturized FMCW LiDAR in the future. This article focuses on the on-chip integrated FMCW LiDAR using OPA, explaining the system's working principles.It summarizes the development status of on-chip integrated FMCW LiDAR based on various research progress both domestically and internationally. Key technologies such as frequency modulation, transmission, scanning and reception are also sorted out, and the applications and typical systems in related fields are reviewed. Finally, the analysis looks forward to the future development trends and potential challenges of on-chip integrated FMCW LiDAR. Conclusions and Prospects The silicon-based optoelectronic integration technology has given birth to high-performance and low-loss on-chip optical devices, which have promoted the development of FMCW LiDAR in the direction of high integration and miniaturization. The on-chip integrated FMCW LiDAR based on OPA scanning has many advantages such as fast scanning rate and strong stability. As technology research and product development continue to deepen, on-chip integrated FMCW LiDAR will show greater potential and value in academic research and commercial applications.
Aug. 25, 2024Vol. 53 Issue 8 20240239 (2024)
Hao LEI, Yadong JIAO, Kunlin XIE, Xinsheng ZHAO, Zhixu JIA, Guanshi QIN, and Jianfeng LI
ObjectiveSupercontinuum (SC) sources spanning the near-infrared (NIR) and mid-infrared (MIR) regions have garnered significant interest and found widespread applications in tissue imaging, sensing, spectroscopy, defense, and environmental monitoring. While numerous SC laser systems with impressive performance have been reported globally, challenges such as low damage thresholds and susceptibility to deliquescence in air have persisted with fluoride nonlinear fibers (e.g., ZBLAN and InF3 fibers), even with end cap protection during prolonged high-power operation. Hence, the imperative need arises to develop mid-infrared fibers characterized by higher damage resistance thresholds, enhanced nonlinear coefficients, and improved water resistance to elevate the overall performance of SC lasers.Methods A 1 550 nm ns pulsed fiber laser was used as the seed source, and the seed pulse was first amplified and spectrally pre-broadened by a two-stage erbium-ytterbium doped fiber amplifier (EYDFA) and a section of single-mode fiber, respectively. The high-power flat 1.9-2.7 μm SC laser was obtained by a thulium-doped fiber amplifier (TDFA) with power amplification and spectral broadening again. The 1.9-2.7 μm SC laser was then coupled into a 60-cm-long fluorotellurite fiber (TBY) with a core diameter of 10 μm. The TBY fiber exhibited a nonlinear coefficient of 22.4 W-1/km and a measured loss of 0.094 dB/m at 2 μm. The schematic of the SC laser setup is depicted in Fig.1.Results and DiscussionsThe SC spectrum characterization system comprised of a power meter (Thorlabs) for power measurement, an optical spectrum analyzer (Yokogawa, AQ630D) with a measurement range of 600-1700 nm to capture SC spectra at shorter wavelengths (<1.5 µm), and a Mid-IR/IR spinning grating spectrometer (A.P.E, waveScan) with a measurement range of 1500-6500 nm for recording spectral distribution at longer wavelengths (>1.5 µm). As depicted in Fig.2, the SC laser output spectrum exhibited gradual expansion and enhanced flatness with increasing pump power, reaching a spectrum range of 1.25 to 4.05 μm at an output power of 10.19 W. Notably, the exceptional damage and OH- resistance of the TBY fiber contributed to the laser's excellent power stability over extended durations.ConclusionsThis study successfully demonstrated an all-fiber ultra-flat SC source utilizing TBY fiber, spanning from 1.25 to 4.05 μm and yielding an output power of 10.19 W. Leveraging a flat pump source and the high non-linearity coefficient of the TBY fiber facilitated the achievement of an ultra-flat SC spectrum with impressive 3 dB and 10 dB bandwidths of 1290 nm and 2390 nm, respectively. The measured power fluctuations of the two SC sources stood at 0.78% (RMS), indicative of remarkable power stability. The ultra-flat spectrum and outstanding power stability showcased by these SC sources highlight their potential for real-world applications.
Aug. 25, 2024Vol. 53 Issue 8 20240161 (2024)
Linlin FAN, Lingzhen YANG, Juanfen WANG, Weijie DING, Yixiao LI, and Jin QI
ObjectiveChaotic laser has attracted much attention in the laser field in recent years and there is a wide range of applications in optical secure communication, chaos lidar, optical fiber sensing and biomedicine because of their advantages such as strong randomness and anti-interference, noise-like time series and δ-like autocorrelation function. The measurement resolution and sensing accuracy of chaotic laser are directly affected by the nonlinear characteristics of fiber laser, among which the polarization characteristics of the laser are very important for the practical application and basic research of laser. However, the laser stimulated photon and the excited photon have the same frequency, direction, phase and polarization because of its stimulated radiation. Therefore, the laser polarization characteristics will be affected by the laser gain medium, internal structure and other factors. However, in recent years, most researchers have only studied laser polarization characteristics for solving specific technologies, focusing on the detection, control of laser polarization and the polarization dynamics of vector solitons, instead of analyzing the change and regularity of laser polarization characteristics from the internal optical path of the system. The dynamic characteristics of output polarization components of chaotic fiber lasers are rarely discussed. In practical applications, optical nonlinear effect and fiber strain have certain influence on the polarization characteristics of laser. So, the output dynamic characteristics of the polarization component of chaotic fiber lasers are studied in detail in this paper.MethodsThe chaotic laser is generated based on the nonlinear Kerr effect with an erbium-doped fiber ring laser (EDFRL), and the dynamics of the polarization components of the chaotic laser is experimentally studied by adjusting the pump current and the polarization. The output power, dynamic evolution, correlation and spectral characteristics of the polarization components of the chaotic fiber lasers are analyzed in detail. In the experiment, the output of EDFRL is monitored in real time by autocorrelation function.Results and DiscussionsThe power of chaotic fiber laser and its polarization component is linear with the pump current. The periodic, chaotic output and self-pulse of the polarization component are observed as the pump current increases, which is consistent with the dynamic evolution of the chaotic laser. The same dynamic evolution can be observed by changing the polarization state of the chaotic fiber laser. The correlation of polarization components is closely related to the output state of the system. In the experiment, the spectrum of different pump currents is analyzed. The shape of the spectrum does not change with the output state of the laser, and their central wavelength is almost unchanged.ConclusionsThe results can provide a new idea for studying a novel polarization-controllable fiber lasers and multi-channel fiber sensing applications. The work is important for exploring the nonlinear dynamics of the polarization components of chaotic fiber lasers.
Aug. 25, 2024Vol. 53 Issue 8 20240184 (2024)
Zhao WANG, Jun YANG, Min ZHANG, Wenxiang LIU, Guokai SHI, and Hailong HUI
ObjectiveWith the continuous development of optical fiber production technology, optical fiber sensing technology has been widely used in radiation environments such as outer space and nuclear power plants. However, under the action of radiation sources such as X-ray, γ-ray, electron and neutron, optical fiber will produce radiation induced loss especially in the intense pulse radiation field, the transient induced loss of optical fiber can reach thousands of dB, which has been widely concerned. To carry out the experimental study on the mechanical effect of radiation beam acting on materials, a set of optical fiber displacement interferometry system was established to obtain the dynamic mechanical response parameters of various materials under irradiation. In order to improve the radiation resistance of the interferometry system, it is necessary to carry out the examination experiments of various types of radiation-resistant quartz optical fibers and select the optical fibers with excellent radiation resistance.MethodsBased on the established optical fiber displacement interferometry system, it is necessary to carry out irradiation experiments. Under the conditions of working wavelength of 1 550 nm and injected optical power of 40 mW, the online induced loss values of various radiation-resistant single-mode fibers under steady and transient irradiation are obtained, and there is no relevant data at home and abroad at present. The radiation sources selected in the experiment include 60Co radiation source and " Qiangguang-Ⅰ" γ pulse radiation source, respectively with radiation dose rates of 0.5 Gy·s-1 and 5.0×109 Gy·s-1, where the pulse width of the pulse radiation source is about 20 ns. The fiber samples selected in the experiment include Ge-doped radiation-resistant single-mode quartz fiber, F-doped radiation-resistant single-mode quartz fiber and G.652 ordinary single-mode fiber. All optical fiber samples were arranged in the radiation window, and the radiation induced loss of optical fiber in steady and transient irradiation experiments was obtained at the same time to obtain its radiation resistance.Results and DiscussionsUnder the steady irradiation of 60Co with a dose rate of 0.5 Gy·s-1 and a total dose of about 2.5 kGy, the radiation-induced loss of the samples of Ge-doped and F-doped radiation-resistant fiber is less than 17 dB·km-1, and that of the corresponding 10 m optical fiber is less than 0.2 dB. With the increase of irradiation time, the radiation-induced loss is saturated. However, the radiation-induced loss of conventional G.652 single-mode fiber increases with the increase of irradiation time, and the induced loss is more than 40 dB·km-1. Under the action of intense γ pulse with a peak dose rate of 5×109 Gy·s-1 and a pulse width of about 20 ns, two different types of F-doped optical fibers have the best radiation resistance, respectively with the peak radiation-induced loss of 471.5 dB·km-1 and 608.6 dB·km-1, and the recovery time of communication is about μs. The peak radiation-induced loss of conventional G.652 single-mode fiber is 2 378.2 dB·km-1. Ge-doped fiber has the worst radiation resistance, and the peak radiation-induced loss is 2 691.3 dB·km-1, which keeps the induced loss saturated in μs time scale. Ge-doped fiber can be used in steady-state radiation environment, but not in transient radiation environment. The reason for this phenomenon is that Ge-doped fiber is easier to produce defects under irradiation, but the recovery speed of defects in this kind of fiber is relatively fast. Under transient strong radiation, the defects produced by Ge-doped fiber are more obvious, and the phenomenon of "color center" appears for a long time.ConclusionsThe experimental results of steady-state and transient irradiation can be summarized as follows: 1) The designed optical fiber irradiation experiment successfully obtained the radiation-induced loss of each optical fiber sample under steady-state and transient irradiation conditions. Especially, the introduction of reference light path not only eliminates the influence of the fluctuation of laser and photoelectric converter on the measurement, but also improves the reliability of the measurement data and plays an important role. 2) The real-time induced loss curves of Ge-doped, F-doped and G.652 single-mode fibers under the same radiation source are successfully obtained at the working wavelength of 1 550 nm, and the response differences of various types of radiation-resistant fibers are compared and analyzed. 3) Compared with others, Ge-doped radiation-resistant single-mode fiber is more sensitive to irradiation dose rate and can be used in steady-state irradiation. F-doped radiation-resistant single-mode fiber has good radiation resistance, which can be used in steady and transient intense irradiation conditions.
Aug. 25, 2024Vol. 53 Issue 8 20240188 (2024)
Zhenghao ZHAI, Yizhou WANG, Jing LI, Liang WANG, Xiaoxiao DAI, Chen LIU, and Qi YANG
ObjectiveCurrently, the industry has begun to study the next-generation mobile communication technology (6G), which physically divides the space-air-ground integrated network into three parts of satellite, high-altitude platform, and ground mobile communication network. Low Earth Orbit (LEO) satellite communication network has the advantages of wide coverage, long transmission distance, and large transmission capacity, which makes LEO communication network an indispensable part of the space-air-ground integrated network. Coherent optical communication is suitable for free-space laser communication between LEOs due to its advantages of long-distance transmission and flexible modulation and demodulation. At present, BPSK, QPSK, DP-QPSK and other coherent optical modulation formats are commonly used in laser communication between satellite networks to meet the multi-rate adjustable scenarios. In addition, laser ranging is a particularly important application of laser communication, which provides accurate and valuable information for ground navigation and earth observation. Considering the satellite payload and power consumption, how to achieve high-speed laser communication between satellites and a highly compatible communication/ranging integrated system that can complete accurate ranging is of great significance to the next generation of large-capacity inter-satellite information networks.MethodsAn integrated system for communication and ranging at the sub-symbol level is proposed (Fig.1) . Since the digital clock recovery algorithm can output the frequency and phase offset within the symbol, ranging between the transmitter and the receiver can be achieved by extracting the phase deviation from it. The scheme realizes sub-symbol level ranging without interrupting the normal communication mode (Fig.2). Compared with other ranging schemes, this system does not require additional complex algorithms or hardware. The scheme keeps the ranging data frames aligned with integer seconds by inserting specific ranging data frames and transmits an integer number of frames per second. A bidirectional coherent optical communication device completes a bidirectional one-way ranging process by sending ranging information to each other.Results and DiscussionsAt the transceiver of terminal A and terminal B, a continuous wave laser generates light with a wavelength of 1 550 nm and a linewidth of ~75 kHz. The light is modulated in a Mach Zehnder Modulator (MZM). It is noteworthy that the proposed ranging scheme is insensitive to both modulation format and rate. Both terminals can send and receive signals with different modulation formats, including OOK, BPSK and QPSK. Moreover, it can flexibly adjust different communication rates. At the receiver of the two terminals, an integrated coherent receiver, an local oscillating laser, an analog-to-digital converter, and a FPGA are integrated on the a small transceiver board (Fig.3). A section of variable optical delay line is added to the link from terminal B to terminal A. The optical delay line varies from 0 to 600 ps with a resolution of 5 ps, which corresponds to an optical transmission distance of 0 m to 0.18 m. The FPGA generates a Pseudo-Random Binary Sequence 23 signal. Multiple ranging experiments were performed with 625 Mbps and 1 Gbps BPSK signal rate. The experiments were conducted with different preset delays using different lengths of optical delay lines. The results show that the symbol duration is 1.6 ns and 1 ns, and the Root Mean Square Error is 36.46 ps and 47.38 ps, which is 2.25% and 4.74% of the symbol duration (Tab.1).ConclusionsA low-complexity and high-compatibility integrated communication/ranging system is designed. Considering that clock errors are unavoidable in practical applications because the transmitter and receiver clocks operate independently. The proposed scheme improves the traditional demodulation method for communication terminals by measuring the phase offset. The system calculates the value of the phase offset by means of an all-digital clock recovery algorithm. Remarkably, this high-precision ranging system is able to achieve sub-symbol level accuracy without extra hardware cost. The communication/ranging experiments are performed with 625 Mbps and 1 Gbps BPSK signals. The results show that the ranging accuracy reaches 2.25% and 4.74% of the symbol duration. The communication/ranging system is broadly applicable to most bi-directional laser communication links. It does not rely on a specific communication rate or modulation format, which demonstrates its excellent compatibility. The proposed method solves the problem of poor generalization and high complexity of the existing ranging system.
Aug. 25, 2024Vol. 53 Issue 8 20240194 (2024)
Yuanming ZHAO, Bo ZHANG, Chengran ZHANG, Yafeng XIE, Qun NIU, and Jinli TANG
ObjectiveWhen the optical systems are used for detecting and imaging targets, stray light generated by strong light sources such as the sun can incident on the image plane, so the imaging quality of the optical system is affected by the noise. In severe cases, it may even cover the energy of the imaging beam. The suppression ability of stray light in optical system is one of the important indicators of optical system performance. The annular folded aperture optical system is made of single optical element to achieve high image quality and system integration. Because the multi-reflective surfaces are arranged on the same substrate material surface, the image quality of the annular folded aperture optical system is affected seriously by the stray light. The method of stray light suppression is proposed for the annular folded aperture imaging system.MethodsThe stray light analysis is applied at different off-axis angles, and the characteristic angle can be selected. When the beam with the smallest off-axis angle is found and suppressed, the influence of stray light can be eliminated. The system without stray light suppression can be subjected to stray light analysis, the characteristic angle of stray light is obtained through point source transmittance data analysis, and then the stray light path at this angle is analyzed (Fig.6). When there are obvious bright spots on the image and the point source transmittance value is smaller than one order of magnitude for the field of view of the system, the characteristic angle can be determined. According to the analyzed characteristic angle, the expression of the light shield length can be obtained.Results and DiscussionsThe focal length of the annular folded aperture optical system used for the stray light analysis is 60 mm, the diameter is 70 mm, the thickness is 18 mm, the ratio of total system length to focal length is 0.3, and the obscuration ratio is 0.74. A simulation model for the optical system is established and stray light analysis is performed to obtain the point source transmittance results. The off-axis angle of stray light analysis is 5° to 85°, and the number of rays traced at each angle is 2 billion. The annular folded aperture optical system without stray light suppression has severe influence, and the point source transmittance is 10-2 to 10-3. Based on the analysis of stray light in this system, the characteristic off-axis angle at the critical state is 14.9°, and the length of the external light shield is 47.57 mm. When the annular folded aperture optical system with a light shield, it can be seen that the concentrated light spots are eliminated, and the entire energy is evenly distributed on the image plane, so stray light is effectively suppressed (Fig.13).ConclusionsThe method of stray light suppression is proposed for the annular folded aperture imaging system. The characteristic angle of stray light can be obtained through point source transmittance data analysis, and the expression of the light shield length is derived. The point source transmittance curve of the annular folded aperture imaging system optimized by stray light suppression has fewer extreme points. It can be seen from the curve that the point source transmittance value of stray light has decreased by 2 orders of magnitude when the off-axis angle is less than 15°. When the off-axis angle is greater than 15°, the point source transmittance value of stray light has decreased by 2 to 4 orders of magnitude. The results show that, the stray light can be suppressed by the designed light shield effectively, and it is possible to achieve high image quality for single chip element.
Aug. 25, 2024Vol. 53 Issue 8 20240189 (2024)
Xu LIU, Heng WANG, Xiaofeng LIU, and Zhen JIA
ObjectiveThe main load-bearing cylinder is one of the most important supporting structures in optical remote sensing satellites, which plays a role in determining the relative position accuracy of the primary and secondary mirror. Its mechanical performance indicators have a significant impact on the imaging quality of space cameras. Due to the long focal length of large aperture space cameras and the large distance between the primary and secondary mirrors, the axial size of the main load-bearing cylinder increases. Moreover, during ground installation and testing, the main load-bearing cylinder is mostly in a cantilever state, in a relatively harsh working environment. Simultaneously, it must withstand dynamic excitations such as vibrations, impacts, and accelerations generated during the rocket launch process. As the main load-bearing cylinder accounts for a large proportion of the mass in space cameras, in order to meet the design requirements of structural lightweighting, it is also necessary to optimize the design of the main load-bearing cylinder. Therefore, designing a main load-bearing cylinder with a reasonable structural form, high lightweight ratio, and high stiffness has become an important part of the structural design of coaxial space cameras.MethodsThrough the comparison of various material performance parameters, carbon fiber composite materials with high specific stiffness and low linear expansion coefficient were ultimately selected for the main load-bearing cylinder, and the basic structural form of the main load-bearing cylinder was designed (Fig.2). Then, finite element software was used for multiple load cases simulation analysis (Fig.5). Based on the analysis results, multi-objective and multiple load cases optimization design was carried out on the main load-bearing cylinder, aiming to reduce the structural mass while ensuring that the dynamic and static stiffness of the structure meets the design requirements. More reasonable structural parameters were determined through size optimization (Fig.7), the key structural layer parameters were improved through layer optimization. Finally, dynamic analysis and verification were carried out on the optimized main load-bearing cylinder, and the technical indicators meet the design requirements, improving the mechanical performance of the main load-bearing cylinder while reducing the structural mass.Results and DiscussionsBefore the optimization design of the main load-bearing cylinder, the displacement of the secondary mirror under gravity conditions was 9.15 μm, the first-order fundamental frequency was 196.3 Hz, and the overall mass was 14.3 kg. After size optimization, the first-order fundamental frequency was 220.6 Hz, and the rigid body displacement of the secondary mirror under gravity conditions was 5.96 μm. After layer optimization, the first-order fundamental frequency of the main load-bearing cylinder was 241.2 Hz, the maximum displacement of the secondary mirror under gravity conditions was 5.93 μm, and the maximum deformation under thermal load at 4 ℃ was 4.59 μm, all of which met the design requirements. The optimized overall mass was 12.6 kg. While improving the structural stiffness, the mass was reduced by 1.7 kg. After size optimization and layer optimization, a more reasonable structural form and layer parameters were determined for the key structure. The mechanical performance of the main load-bearing cylinder has been significantly improved.ConclusionsTaking into account the design indicators such as envelope size, dynamic and static stiffness, and overall mass, after optimization design of the main load-bearing cylinder, under the action of gravity, the displacement and tilt of the second mirror are 5.93 μm and 3.65″, respectively (Fig.9). The maximum deformation of the main bearing cylinder under a temperature rise of 4 ℃ is 4.59 μm (Fig.10). The x-direction and z-direction responses of the secondary mirror installation surface are 6.43 grms and 6.35 grms, respectively (Fig.13), which meet the design requirements of the main bearing cylinder. At the same time, the errors between the sine sweep frequency and random vibration test data and the finite element analysis results are within 3%, verifying the accuracy and feasibility of the optimization design method and simulation analysis process of the main bearing cylinder. The overall mass has been effectively reduced by 1.7 kg, with a decrease of 11.9%, providing a universal and effective method for the lightweight design and analysis of carbon fiber main load-bearing cylinder structures for large aperture space cameras.
Aug. 25, 2024Vol. 53 Issue 8 20240274 (2024)
Zhigeng WU, Ming LI, Zhenghao YAO, and Tianyi WANG
ObjectiveThe transmittance of free-space quantum channels plays an important role in the security analysis of continuous-variable quantum key distribution (CV-QKD). The atmospheric turbulence in free space leads to random fluctuations in transmittance, thereby degrading the CV-QKD. The existing analytical models fail to accurately characterize the transmittance of free-space quantum channel, since the models lack of comprehensive considerations based on the physical mechanism of atmospheric turbulence effects. Therefore, the accurate fluctuation characteristics of channel transmittance are studied in this paper by dint of numerical simulations concerning various turbulence impacts from the view of the basic concept of atmospheric turbulence.MethodsIn this paper, the method of split-step transmission combined with phase screen flat panel is employed to numerically simulate the free space quantum channel according to the basic concept of atmospheric turbulence (Fig.2-3). The simulation results are comprehensively compared and analyzed with those existing analytical models. Concretely, numerical simulations of 105 were performed on the free space quantum channel to calculate the transmission rate, and the mathematical statistics has been made. The probability density of the free space quantum channel transmission has been obtained (Fig.4-5).Results and DiscussionsThe results showed that the modified Von Karman atmospheric turbulence spectrum model could accurately achieve the realistic free space quantum channel, while the transmission of the free space quantum channel calculated using the Kolmogorov atmospheric turbulence spectrum model would be overestimated, with a maximum error of 5.28%. By comparing the probability density of transmission accurately achieved by numerical simulation with the existing elliptical beam approximation model and beam wandering model, it is concluded that those existed models would underestimate the transmission, thus deviating from the realistic free space quantum channels.ConclusionsThe statistical characteristics of transmittance fluctuation with respect to the horizontal free space quantum channels under weak and moderate turbulence have been numerically studied in this paper by using the method of split-step transmission combined with the field amplitude sampling based on sparse spectrum. To begin with, the differences between the two widely known atmospheric turbulence spectrum models in simulating transmittance fluctuation have been analyzed. Compared to the modified spectrum model, the transmittances calculated by the Kolmogorov spectrum model are relatively higher. Consequently, the Kolmogorov spectrum model would overestimate the free space quantum channel transmittance, while the modified Von Karman spectrum model enables statistical laws of transmittance which highly match the realistic free space quantum channels. Subsequently, a comprehensive comparison has been performed between the statistical results associated with the numerical simulations and those known analytical models including the beam wandering model and the elliptical beam approximation model. It could be concluded that the probability density curves of transmittance presented by the existing analytical models deviate from the numerical simulation results. The transmittance would be underestimated by the use of existing models due to the fact that those models merely concern single turbulence effect. In contrast, the numerical simulations performed in the paper naturally take various turbulence impacts into account according to the basic concept of atmospheric turbulence. In the sense, the achievement is able to accurately represent the random fluctuation characteristics of free space quantum channel transmittance, which can be employed to precisely evaluate the security of free-space CV-QKD.
Aug. 25, 2024Vol. 53 Issue 8 20240210 (2024)
© Copyright 2018-2021 | Chinese Laser Press.
All Rights Reserved 沪ICP备15018463号-20