




 View fulltext
View fulltext

2023
Volume: 31 Issue 5
16 Article(s)

Yang LU... and Yiming ZHANG|Show fewer author(s)
The dynamic mechanical wheel-ground interaction is extremely complex when off-road vehicles are driven on soft soil pavements, and the extent of wheel sagging and traversability are of significant interest in the field of vehicle
Mar. 10, 2023Vol. 31 Issue 5 746 (2023)
Yicheng LI... and Shucai XU|Show fewer author(s)
To solve the location and path planning challenges for intelligent vehicles in GPS-restricted underground parking lots, we employ a vision-based approach that combines binocular offline mapping and monocular online localization to
Mar. 10, 2023Vol. 31 Issue 5 757 (2023)

Ningdong CHANG... and Yuqiong LI|Show fewer author(s)
With the development of equipment intelligence, vehicle path planning in complex off-road environments has become a key technology, which is integral to the development of military forces and the intelligence of military equipment
Mar. 10, 2023Vol. 31 Issue 5 767 (2023)

Ningdong CHANG... and Yuqiong LI|Show fewer author(s)
With the continuous development of military intelligence, equipment path optimization in off-road environments has become one of the most important research fields in recent years and plays an important role in promoting the devel
Mar. 10, 2023Vol. 31 Issue 5 776 (2023)
Ou ZOU... and Yuqiong LI|Show fewer author(s)
To achieve accurate and rapid interpretation of in-situ soil mechanical parameters and quantitatively evaluate military equipment mobility, an inversion method for soil Mohr-Coulomb parameters is established based on the dynamic c
Mar. 10, 2023Vol. 31 Issue 5 565 (2023)
Long XUE... and Jing LI|Show fewer author(s)
The geomorphological characterization of Mars is complex. Therefore, to ensure the safe driving of rover, it is essential to understand the surface state around the rover through images captured by on-board digital cameras. The im
Mar. 10, 2023Vol. 31 Issue 5 581 (2023)

Qinghao LIU... and Ou ZOU|Show fewer author(s)
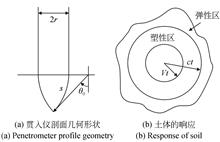
Soil in-situ penetration technology is an important method for obtaining its physical and mechanical parameters with the advantages of accuracy, rapidity, and continuity. It has a wide range of applications in marine geotechnical
Mar. 10, 2023Vol. 31 Issue 5 588 (2023)
Xiaoxue JIA... and Qing XU|Show fewer author(s)
This paper proposes a feature-matching algorithm based on an adaptive search radius to improve the accuracy of SLAM localization and mapping. This method can overcome the problem in which the search radius of feature matching is f
Mar. 10, 2023Vol. 31 Issue 5 621 (2023)
Huan XIE... and Xiaohua TONG|Show fewer author(s)
ICESat-2 is the world's first laser altimetry satellite to use photon counting technology. It provides high-precision, three-dimensional, large-scale ground data that can be obtained rapidly. Altimetry data obtained using photon d
Mar. 10, 2023Vol. 31 Issue 5 631 (2023)
Mofan DAI... and Pengcheng LI|Show fewer author(s)
Existing deep learning-based terrain classification methods are mainly for remote sensing imagery; however, the spatial information of point clouds is underutilized. Specifically, the fusion of heterologous features is insufficien
Mar. 10, 2023Vol. 31 Issue 5 644 (2023)
Xianying LIU... and Yuqiong LI|Show fewer author(s)
The unsupervised representation learning of point clouds is crucial for understanding and analyzing point clouds, and a 3D reconstruction-based autoencoder is an important architecture in unsupervised learning. To address the rota
Mar. 10, 2023Vol. 31 Issue 5 656 (2023)
Haihong XIAO... and Wenxiong KANG|Show fewer author(s)
The inference of complete three-dimensional (3D) shape and semantic scene information from partial observations is crucial for various applications, such as autonomous driving, robotic vision, and metaverse ecosystem construction.
Mar. 10, 2023Vol. 31 Issue 5 667 (2023)
Kang WANG... and Meng ZOU|Show fewer author(s)
The development of an emergency return vehicle for lunar exploration is crucial for future manned Chinese lunar exploration missions. To meet the needs of emergency life insurance and short distance movement on the moon surface, t
Mar. 10, 2023Vol. 31 Issue 5 697 (2023)
Pengda CHENG... and Xinguang ZHU|Show fewer author(s)
Vehicles with varying loads deform soft-soil grounds, and the depth of their wheel intrusion is a crucial parameter for evaluating vehicle trafficability on soft soil. This study introduces a novel method that combines the Continu
Mar. 10, 2023Vol. 31 Issue 5 707 (2023)
Xuetao HUANG... and Jiakun LI|Show fewer author(s)
To solve the trafficability problem of track equipment on super-wetting clay soil, this study investigates the evaluation indexes of track equipment trafficability on super-wetting clay soil, and suggests revised trafficability ru
Mar. 10, 2023Vol. 31 Issue 5 719 (2023)
Yan SHEN... and Yuqiong LI|Show fewer author(s)
The surface of Mars is a complex terrain covered with soft soil, which poses significant risks of subsidence, high slip, or even collapse for rovers exploring the planet. A thorough analysis of rover trafficability and effective p
Mar. 10, 2023Vol. 31 Issue 5 729 (2023)
© Copyright 2018-2021 | Chinese Laser Press.
All Rights Reserved 沪ICP备15018463号-20