





 View fulltext
View fulltext

2023
Volume: 50 Issue 2
9 Article(s)

Chi Zhang, Ningmu Zou, Jinyu Song, Shuai Tong, Yuanyuan Yao, Zhewen Ding, Feng Wang, Yixin Zhang, and Xuping Zhang
Overview: The phase-sensitive optical time-domain reflectometry (Φ-OTDR) sensing system has the characteristics of high dynamic response and high sensitivity, and has great application potential in the field of large-scale engineering structural health monitoring. The instrumentation level and engineering application of Φ-OTDR systems depend to a large extent on digital signal processing (DSP) technology. For the Φ-OTDR system, the tasks of digital signal processing mainly include three aspects. First, the demodulation of Rayleigh's backscattered light phase information should be completed accurately and efficiently. It is necessary to understand the relationship between the phase difference and the sound field signal. Then, it is necessary to reasonably set the core parameters of the Φ-OTDR system in the digital-to-analog conversion to obtain the RBS signal quickly and accurately. After that, it is necessary to select an appropriate demodulation method for demodulation. Second, all kinds of noise floor of the sensing system itself should be analyzed and suppressed. Since the noise floor of the sensing system itself is inevitable, analyzing and suppressing it is the key to improve the signal-to-noise ratio of the system. The drift of the laser center frequency, the local birefringence change of the fiber, and the nonlinear correspondence between the fiber strain and the interference intensity will all introduce corresponding noise to the system. Among the many types of noise, the coherent fading brought by the system will cause the system SNR to continue to deteriorate and randomly form detection blind spots; the polarization-related noise caused by the external environment will affect the Φ-OTDR system's ability to perceive multiple disturbance events. Third, reliable feature extraction and pattern recognition strategies should be quickly selected to improve the accuracy and intelligence of system reconstruction disturbance events. In engineering applications, various monitoring objects and time-varying background noise make it difficult to describe vibration events by accurate mathematical models. In particular, when Φ-OTDR is used in new scenarios, it needs to be able to quickly establish a corresponding analysis model based on industry knowledge, and minimize the degree of manual participation in it. Therefore, efficient and reliable object feature extraction methods, pattern recognition algorithms, and machine learning strategies are urgently needed. In view of the above problems, this paper summarizes the main digital signal processing methods and technologies of the Φ-OTDR system in recent years in the digitization of optoelectronic signals, the demodulation of phase information, the suppression of system noise, and the pattern recognition of detected objects. Two application cases of transmission line condition monitoring and buried cable breakage early warning illustrate the digital signal processing skills in the design of engineering application schemes.The phase-sensitive optical time-domain reflectometry (Φ-OTDR) sensing system has the characteristics of high dynamic response and high sensitivity, and has great potential in the field of large-scale engineering structural health monitoring. The instrumentation level and engineering application of Φ-OTDR systems depend to a large extent on digital signal processing (DSP) technology. This paper compares and analyzes the main digital signal processing methods and technologies of Φ-OTDR systems in signal quantization, demodulation, noise suppression, and pattern recognition in recent years. The importance and method of combining digital signal processing with industry background knowledge in engineering applications are expounded, and the development status and trend of the digital signal processing methods in Φ-OTDR systems are summarized and prospected.
Feb. 25, 2023Vol. 50 Issue 2 220088 (2023)
Jinze Xia, Haoming Sun, Shenghui Hu, and Dongtai Liang
After testing with 50 frames of random data, the experimental results show that the clustering accuracy and clustering time of this method are 86.96% and 23 ms, respectively, which are better than other algorithms, and can be used in mobile robot navigation and obstacle avoidance, autonomous handling, and other fields.Aiming at the requirement of fast clustering and segmentation of 3D point clouds for mobile robots in the process of perception of unknown environments, a 3D laser point cloud clustering method based on image information constraints is proposed. Firstly, the effective 3D environment information is obtained through point cloud preprocessing, and the RANSAC method is used to segment and eliminate the ground point cloud. Secondly, the sensor data is introduced into the YOLOv5 target detection algorithm after completing the spatiotemporal registration, and the K-means clustering algorithm of the 3D point cloud is improved. The detection frame range of the 2D image target is used to constrain the 3D point cloud and reduce the interference of non-target objects. The parameter initialization of the point cloud clustering algorithm is realized based on the image detection information. The clustering results are optimized by the intra-class outlier elimination method. Finally, the mobile robot hardware platform is built, and the box is tested. The experimental results show that the clustering accuracy and clustering time of the method in this paper are 86.96% and 23 ms, respectively, which can be used in mobile robot navigation and obstacle avoidance, autonomous handling, and other fields.
Feb. 25, 2023Vol. 50 Issue 2 220148 (2023)

Dong Hou, Junwei Ren, Guangkun Guo, and Ke Liu
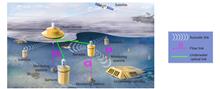
Overview: Abundant resources in the ocean are not explored yet. The meaning of ocean exploration is far-reaching for the development of human society. In the future, the construction of underwater observation networks with outstanding performance is the precondition of a variety of scientific experiments, and time-frequency networks like GPS are helpful for the collaborative working of underwater platforms. The success of underwater wireless optical communication expands the dissemination of time-frequency signals over free-space and fiber links to underwater links. Compared with the conventional underwater frequency transfer methods, i.e. sonar, fiber links, and microwave method, the laser-based underwater frequency transfer owns strong competitiveness with the features of high flexibility, high bandwidth, and low latency. Such advantages make the laser-based underwater frequency transfer a promising approach for the construction of future underwater time-frequency networks. The paper introduces the progress on laser-based underwater frequency transfer at the University of Electronic Science and Technology of China, including the property analysis of underwater links, three specific techniques, and the future works that would be conducted. The property analysis of underwater links was conducted from the timing fluctuation attributed to refractive-index perturbation and underwater turbulence introduced power spectral density (PSD) that derived from the Kolmogorov model. The simulation results of Kolmogorov PSD and its modified PSD (von Kármán model) are given and analyzed. Based on the analysis, the experimental demonstrations of frequency transfer over 3 m, 6 m, and 9 m underwater links were conducted. The experimental results show that timing fluctuation is most partly attributed to underwater turbulence. It is necessary for highly stable frequency transfer to suppress timing fluctuation. An electronic phase compensation technique was employed for timing fluctuation suppression. A 100 MHz radio-frequency (RF) signal has been transferred over a 5 m underwater link using this technique. With the help of this technique, the root-mean-square (RMS) timing fluctuation was successfully suppressed from 9.6 ps to 2.1 ps within 5000 s. The noise, limited compensation bandwidth, and residual timing fluctuations of the electronic phase shifters block further improvement of system performance. Consequently, the optical delay line-based optical phase compensation technique was proposed and experimentally demonstrated. A 500 MHz RF signal was transferred over a 5 m underwater link for 5000 s, the RMS timing fluctuation was successfully suppressed from 7.3 ps to 0.162 ps. The experimental results show that the proposed technique could effectively suppress timing fluctuation and lower the system noise floor. Both phase compensation techniques are hard to support multiple-access frequency transfer because compensation configuration is included in the transmitter. A novel scheme for multiple-access frequency transfer was proposed and experimentally demonstrated. A 100 MHz RF signal was transferred over a 3 m underwater link for 5000 s, the RMS timing fluctuation was successfully suppressed from 73.4 ps to 3 ps. With this scheme, the phase of the frequency signal at multiple receivers could be simultaneously locked to the phase of the reference signal at the transmitter. In the future, the optical link of the multipleaccess frequency transfer experimental setup would be optimized for further performance improvement. Laser-based underwater frequency transfer experiments with picosecond-level timing fluctuations over hundred meters links would be demonstrated with the help of the single-photon detection technique and a picosecond mode-locked laser at 1064 nm wavelength.Inspired by underwater wireless optical communication, laser-based underwater frequency transfer technology extends frequency transfer and dissemination from fiber links and free-space links to underwater links and shows greater potential for applications. Compared with traditional underwater frequency transfer technologies (sonar, fiber links), laser-based underwater frequency transfer technology is more flexible and avoids the multipath effect and high latency. In the future, this technology is expected to contribute to the applications of underwater navigation and sensing, distributed observation networks, tracking and positioning systems, etc. This paper first introduces the background and significance of the underwater laser-based frequency transfer technique, and briefly shows the achievements of domestic and foreign scientific research institutions in underwater laser-based frequency transfer. Next, the paper presents the time domain and frequency domain descriptions of underwater link properties, in which the former is based on the refractive index perturbation of the water column and the latter is based on the Kolmogorov atmospheric turbulence model. Then, the research results of the University of Electronic Science and Technology in laser-based underwater frequency transfer are reported, including the electrical phase compensation technique, the optical phase compensation technique, and the multiple-access frequency dissemination technique. Finally, the three laser-based underwater frequency transfer experiments are summarized, and the future works of our group in laser-based underwater frequency transfer have been prospected. As a promising underwater frequency transfer technology, laser-based underwater frequency transfer technology will play a crucial role in relevant applications in the future.
Feb. 25, 2023Vol. 50 Issue 2 220149 (2023)
Tianqi Lv, Yingchun Wu, and Xianling Zhao
The experiments are carried out from the aspects of validity verification of each network module, comparison of subjective visual effects, comparison of quantitative evaluation results, and algorithm complexity. The performance of the proposed network is verified on five public light field data sets. The proposed algorithm obtains high-resolution light field sub-aperture images with higher PSNR and SSIM.Based on the advanced imaging technology, light field camera can obtain the spatial information and the angular information of the scene synchronously. It achieves higher dimensional scene representation by sacrificing the spatial resolution. In order to improve the spatial resolution of the light field image, a light field super-resolution reconstruction network based on angle difference enhancement is built in this paper. In the proposed network, eight multi-branch residual blocks are used to extract shallow features. Then, four enhanced angular deformable alignment modules are used to extract deep features. Finally six simplified residual feature distillation modules and pixel shuffle modules are used to complete data reconstruction. The proposed network takes advantage of the angle difference of the light field to complete the spatial information super-resolution. In order to obtain more features difference between different views, the own feature of the single view is emphasized during the feature extraction. The performance of the proposed network is verified on five public light field data sets. The proposed algorithm obtains high-resolution light field sub-aperture images with higher PSNR and SSIM.
Feb. 25, 2023Vol. 50 Issue 2 220185 (2023)

Bozhi Zhang, Ke Liu, Kun Liu, Junfeng Jiang, Man Zhang, and Tiegen Liu
Therefore, aiming at the problem of long-distance complex noise interference and signal attenuation, combined with the characteristics that variance analysis can detect the vibration quickly and effectively in one-dimensional signal, this paper proposes a dynamic variance threshold algorithm, and uses the parallel programming technology to improve the response speed of the system. The signal preprocessed by the band-pass filter is processed by variance processing, Gaussian blur, threshold peak seeking, and accurate center of gravity. The problem of long response time caused by the attenuation of Rayleigh scattering signal and the large amount of computation in the long-distance DVS detection is solved. The parallel programming technology is used to improve the operation speed by 184%, so as to quickly and accurately determine the location of the disturbance.The difference between the man-made disturbance and the noise on a 39 km long optical fiber is experimentally studied, and the influence of the noise is eliminated by the dynamic variance algorithm.The response time of the system is 1 second, the spatial resolution is 20 meters, and the positioning error is less than 0.1%.In order to solve the problems of weak positioning accuracy, low sensitivity, and slow response speed of the distributed fiber vibration sensor system, a dynamic variance threshold algorithm based on the phase-sensitive photosensitive time domain reflection is proposed. The signal preprocessed by the band-pass filter is processed by variance processing, Gaussian blur, threshold peak seeking, and accurate center of gravity. The problem of long response time caused by the attenuation of Rayleigh scattering signal and the large amount of computation in the long-distance DVS detection is solved. The parallel programming technology is used to improve the operation speed by 184%, so as to quickly and accurately determine the location of the disturbance. The difference between the man-made disturbance and the noise on a 39 km long optical fiber is experimentally studied, and the influence of the noise is eliminated by the dynamic variance algorithm. The response time of the system is 1 second, the spatial resolution is 20 meters, and the positioning error is less than 0.1%.
Feb. 25, 2023Vol. 50 Issue 2 220205 (2023)

Shuai Wang, Chunyuan He, Huiqin Rong, Hua Bao, Jialin Hou, and Changhui Rao
Total generalized variation is effective and widely used in natural image denoising and deblurring due to its ability to suppress the staircase effect while preserving image edges and details. In order to improve the reconstruction performance of blind deconvolution on solar images, total generalized variation and PSF regularization are introduced into the reconstruction of solar images. A space-invariant multi-frame blind deconvolution model via second-order total generalized variation is proposed in this paper to improve the robustness of noise and recover more texture details. The model is solved by alternating minimization of the image sub-model and the PSF sub-model, where the image submodel can be solved by the half-quadratic splitting method. Combined with the non-blind deconvolution based on hyper-Laplacian prior, a space-invariant multi-frame blind deconvolution algorithm can be established under the multiscale framework. Then, by overlapping image segmentation and weighted stitching, the space-invariant blind deconvolution algorithm is extended to a reconstruction algorithm suitable for wide field-of-view solar images, which can reduce reconstruction errors caused by anisoplanatism. Finally, the reconstruction experiment and analysis are carried out on the real solar images observed by the one-meter New Vacuum Solar Telescope (NVST) in southwest China. The results show that the algorithm has good image reconstruction performance in both subjective visual effects and objective indexes. Second-order total generalized variation regularization and multi-frame can improve the stability and reliability of solar image reconstruction.Blind deconvolution is one of the commonly used post-reconstruction methods for adaptive optics images. In order to improve the reconstruction performance of blind deconvolution on solar (adaptive optics) images, a space-variant multi-frame blind deconvolution model based on second-order total generalized variation is proposed. It first solves the proposed space-invariant blind deconvolution model via second-order total generalized variation by the alternating minimization and half-quadratic splitting method. Then, according to the characteristics of wide field-of-view solar images which are anisoplanatic, the space-variant in the proposed algorithm is implemented by overlapping image segmentation and weighted stitching. Finally, the reconstruction experiment and analysis are carried out on the real solar images observed by the one-meter New Vacuum Solar Telescope (NVST). The results show that the proposed algorithm has good image reconstruction performance in both subjective visual effects and objective indexes.
Feb. 25, 2023Vol. 50 Issue 2 220207 (2023)

Jing Du, Junbo Liu, Haiyang Quan, and Song Hu
Overview: Lithography accuracy is one of the key parameters to measure the lithography process. Lithography projection objective is the core component of a lithography machine. The distortion of the lithography projection objective is one of the most important factors that affect the overlay accuracy. It causes the position offset exposed on the silicon wafer from the ideal position to the actual position. At present, the detection techniques for the distortion of the projection objective are exposure measurement, aerial image measurement, and wavefront measurement. The exposure measurement that is suitable for lithography manufacturers depends on the exposure process and equipment, thus its detection process is complex. The repeatability of exposure measurement is better than 1 nm. Both the aerial image measurement and the wavefront measurement without exposure are based on the photoelectric sensors. Its detection speed is fast, and the measurement accuracy can be better than 0.4 nm. The image quality detection platform of the projection objective is a device for detecting the optical performance of the projection objective. The wavefront sensor is a device for measuring wavefront aberrations and can also be used for distortion measurement. According to the principle of distortion measurement, when the Hartmann sensor is used to detect the distortion of the projection objective, the measurement accuracy of the mask's actual imaging position through the objective directly affects the accuracy of the distortion detection. So this paper focuses on the analysis of the displacement measurement errors of the image quality detection platform when using the Shack-Hartmann sensor to detect the distortion of the projection objective. The factors that affect the displacement measurement accuracy of the image quality detection stage mainly include the following aspects: the measurement error of the dual-frequency laser interferometer, the horizontal Abbe error of the distortion measurement, and the reproducibility error of the Hartmann position measurement. The measurement errors of the dual-frequency laser interferometer include the instrument error, the geometric error, and the environmental error. These errors are related to the performance of the interferometer, the layout of the interferometer, the performance of the image quality detection stage, and the environmental conditions. The horizontal Abbe error in distortion measurement is due to the fact that the dual-frequency laser interferometer cannot accurately measure the position coordinates of other points outside the central field in distortion detection. The reproducibility error of the Hartmann position measurement means the reproducibility of the Hartman sensor position information measured aiming at a same objective in a period of time. The factors that affect the reproducibility error of the Hartmann position measurement include the fluctuation of the interferometer value, the position control accuracy of the motion stage, the long-term drift of the interferometer, the long-term stability of the Hartmann sensor, the longterm stability of the test light source, the optical properties stability of the objective, etc. In this paper, a set of projection objective image quality detection platform is taken as an example to analyze the errors of its displacement measurement. Its displacement measurement error is about 22 nm within the measurement range of 40 mm × 40 mm. At the same time, the distortion of a projection objective is detected by this image quality detection platform, and the measurement result is about 80 nm. The displacement measurement error in the distortion detection of the lithographic projection objective is one of the important error sources of distortion detection. Depth analysis of the error sources and reduction of the error terms can improve the distortion detection accuracy.In the distortion detection of the lithography projection objective, the displacement measurement error is one of the important error sources. Depth analysis of the error sources and reduction of the error terms can improve the distortion detection accuracy. Combining the positioning and measurement technology of the moving stage, this paper analyzes the displacement measurement error of the image quality detection stage when the Shack-Hartmann wavefront sensor is used to detect the distortion of the projection objective. In this paper, a set of image quality detection platform is taken as an example to analyze the displacement measurement error in the distortion detection of the projection objective, and the image quality detection platform is used to measure the distortion of a projection objective. The distortion detection result is about 80 nm, in which the displacement measurement error of the image quality detection platform will bring about an uncertainty of about 22 nm to the distortion detection result.
Feb. 25, 2023Vol. 50 Issue 2 220226 (2023)
Haiping Chen, Mengyang Li, Tingfen Cao, Han Yan, Liang Zhang, Jinli Zhang, and Chengcheng Wang
Overview: The environment perception ability of the rover is the basis of its intelligent movement and detection, and obstacle detection and recognition is an important aspect of the environment perception, and the recognition effect directly determines the work ability and safety of the rover. At present, the obstacle recognition of Mars exploration vehicles mainly relies on binocular cameras. This passive measurement method based on vision is easy to fail in 3D reconstruction in weak texture and low brightness areas. As a direct measurement method, lidar has better performance in the face of the above disadvantage scenarios, so it has attracted more attention in the current hot field of automatic driving. This paper proposes an automatic obstacle recognition method for the Mars surface based on lidar data. Firstly, based on the analysis of the laser reflection intensity theory, the point cloud intensity was corrected according to the distance and angle factors through the intensity compensation theory, so as to eliminate the intensity difference of homogeneous ground objects caused by the difference in distances and angles, and then the reflection relationship between the laser radar intensity value and the target feature was accurately constructed. The global threshold was automatically obtained by the Otsu method, and the point cloud on the Mars surface was adaptively classified into an obstacle point cloud and a non-obstacle point cloud. Then, the curvature threshold is set, the unqualified obstacle point cloud is eliminated by curvature constraint, and the obtained point cloud belongs to the obstacle. Finally, the connectivity clustering based on octree leaf nodes is used to segment the obstacle point cloud into independent individuals. On this basis, the typical obstacles larger than a specific size are separated from the obstacle point cloud by setting the obstacle diameter size threshold, so as to realize the automatic recognition of the Martian surface obstacle point cloud. The size of the simulated Martian surface field tested in this paper is 22 m×16 m, and the main obstacles in the scene are rocks and other vehicle detectors. The experimental data collection and processing of the simulated field show that the proposed method can effectively extract the Martian surface obstacles in the lidar point cloud, and the recognition accuracy of typical obstacles is close to 90%, which can provide a reference for the related research based on the Martian rover obstacle detection and environmental perception. Of course, the current popular deep learning method is also a highly intelligent recognition method, so the obstacle point cloud recognition based on deep learning is also a kind of idea worthy of subsequent discussion and experiment.The environment perception ability of the Mars rover is the basis of its intelligent movement and detection. Obstacle detection is an important aspect of environment perception, which directly determines the working ability and safety of the Mars rover. In this paper, a method of identifying obstacles on the surface of Mars based on LiDAR data is proposed. Based on the obtained LiDAR point cloud data, the intensity of the point cloud is modified according to the distance and angle factors through the intensity compensation theory based on the analysis of the laser reflection intensity theory, and then the reflection relationship between the lidar intensity value and the target characteristics is constructed. The global threshold is automatically obtained through the Otsu method, and the Mars surface point cloud is adaptively classified into an obstacle point cloud and a non-obstacle point cloud. Then, the obstacle point cloud which does not meet the conditions is removed by curvature constraint. Finally, using the connectivity clustering based on Octree-based leaf nodes, the recognition of the obstacle point cloud on the surface of Mars is realized. Through the simulation experiment, the results show that this method can effectively extract the obstacles on the surface of Mars from the LiDAR point cloud, and provide a reference for the related research based on the obstacle monitoring of the Mars rover and environmental perception.
Feb. 25, 2023Vol. 50 Issue 2 220240 (2023)
Zhe Long, Hang Yang, Han Wu, Yang Li, and Houkun Liang
Overview: The mid-infrared (MIR) wavelength coincides with various molecular resonances and spectroscopy, which is universally used to identify chemical and biological substances. In particular, the 13 μm~20 μm wavelength window has fingerprints of unique material groups such as organometallic, halogenated, and aromatic bonds. Thus, the MIR supercontinuum generation (SCG) is widely used in the fields of biomedicine, spectroscopy, and environmental science. Thanks to the mature semiconductor growth technology combined with the advanced CMOS integration technology, SCG in on-chip devices has been studied in recent years. Cadmium telluride (CdTe) has an ultra-broad transparent spectral range, from 0.86 μm to 25 μm, and one of the largest third-order nonlinear coefficients (n2~5×10?17 m2/W at 1.55 μm, 2×10?17 m2/W at 5.5 μm, which are several times larger than that of silicon) among the MIR materials, which makes CdTe become an excellent candidate for long-wavelength MIR on-chip SCG. As an important material of solar cells, there is a mature film growth and etching technology for CdTe. In this work, we designed a large-core CdTe integrated waveguide on a low-refractive-index cadmium sulfide (CdS) film with a silicon substrate. The waveguide structure is designed with CdS as the intermediate cladding layer to achieve a low waveguide loss and high mode confinement. A large-core CdTe waveguide is tailored to generate a low and flat dispersion in the MIR spectral range, while balancing the large effective nonlinearity and the convenience of coupling. The effective refractive index in the CdTe waveguide is obtained by finite element method. Then, the simulated results solved by the nonlinear Schr?dinger equation manifest that a CdTe waveguide with a propagation distance as short as 1 cm can broaden the MIR spectrum covering 4.1 μm to 9.7 μm pumped by a 5.5 μm femtosecond laser. Experimentally, polycrystalline CdS and CdTe films were deposited by magnetron sputtering, and the CdTe waveguides were fabricated by photolithography followed by wet etching. In particular, the sidewall of the waveguide is almost perpendicular to the substrate due to the large difference in the longitudinal and transverse etching rates caused by the unique grain arrangement of the film. A near-infrared femtosecond laser centered at 1030 nm with a pulse width of 250 fs at a 500 kHz repetition rate is employed as the pump source, and an apparent spectral broadening based on self-phase modulation was observed. The numerical simulations match well with the experimental results. These results pave the way for long-wavelength mid-infrared light sources and provide abundant new opportunities for MIR microphotonics.The mid-infrared (MIR) wavelength coincides with various molecular resonances and spectroscopy. It is a universal way to identify chemical and biological substances. Thus, the MIR supercontinuum generation (SCG) is widely used in biomedicine, spectroscopy, and environmental science. Cadmium telluride (CdTe) has an ultra-broad transparent spectral range, from 0.86 μm to 25 μm, and one of the largest third-order nonlinear coefficients. It makes CdTe become an excellent candidate for long-wavelength MIR on-chip SCG. As an important material of solar cells, there is a well-established thin film growth technology for CdTe. We designed a CdTe integrated waveguide on a low-refractive-index CdS film with a silicon substrate. The simulation results solved by the nonlinear Schr?dinger equation manifest that the MIR SCG covering 4.1 μm to 9.7 μm can be generated from a 1 cm CdTe waveguide pumped by a 5.5 μm femtosecond laser. We experimentally fabricated the waveguide via the lithography and wet-etching techniques. The spectral broadening based on self-phase modulation from the large-core CdTe integrated waveguide is demonstrated by a femtosecond laser at the central wavelength of 1030 nm with a pulse width of 250 fs. The numerical simulations match well with the experimental results. These results pave the way for long-wavelength mid-infrared light sources and provide abundant new opportunities for MIR micro photonics.
Feb. 25, 2023Vol. 50 Issue 2 220313 (2023)
© Copyright 2018-2021 | Chinese Laser Press.
All Rights Reserved 沪ICP备15018463号-20