





 View fulltext
View fulltext
Journal of Electronic Science and Technology
Co-Editors-in-Chief
Zhiming Wang;Yong Wang

2024
Volume: 22 Issue 4
6 Article(s)
Didar Yedilkhan, Abzal E. Kyzyrkanov, Zarina A. Kutpanova, Shadi Aljawarneh, and Sabyrzhan K. Atanov
The growing field of urban monitoring has increasingly recognized the potential of utilizing autonomous technologies, particularly in drone swarms. The deployment of intelligent drone swarms offers promising solutions for enhancing the efficiency and scope of urban condition assessments. In this context, this paper introduces an innovative algorithm designed to navigate a swarm of drones through urban landscapes for monitoring tasks. The primary challenge addressed by the algorithm is coordinating drone movements from one location to another while circumventing obstacles, such as buildings. The algorithm incorporates three key components to optimize the obstacle detection, navigation, and energy efficiency within a drone swarm. First, the algorithm utilizes a method to calculate the position of a virtual leader, acting as a navigational beacon to influence the overall direction of the swarm. Second, the algorithm identifies observers within the swarm based on the current orientation. To further refine obstacle avoidance, the third component involves the calculation of angular velocity using fuzzy logic. This approach considers the proximity of detected obstacles through operational rangefinders and the target’s location, allowing for a nuanced and adaptable computation of angular velocity. The integration of fuzzy logic enables the drone swarm to adapt to diverse urban conditions dynamically, ensuring practical obstacle avoidance. The proposed algorithm demonstrates enhanced performance in the obstacle detection and navigation accuracy through comprehensive simulations. The results suggest that the intelligent obstacle avoidance algorithm holds promise for the safe and efficient deployment of autonomous mobile drones in urban monitoring applications.
Dec. 25, 2024Vol. 22 Issue 4 100277 (2024)
Yi-Feng Li, Zhi-Ang Hu, Jia-Wei Gao, Yi-Sheng Zhang, Peng-Fei Li, and Hai-Zhou Du
Time-series anomaly detection plays a crucial role in the operation of offshore wind turbines. Various wind turbine monitoring systems rely on time-series data to monitor and identify anomalies in real-time, as well as to initiate early warning processes. However, for offshore wind turbines with a high data density, conventional methods have high computational overhead in detecting anomalies while failing to accurately detect anomalies due to variations in data scales. To address this challenge, we propose an efficient anomaly detection method with contrastive learning, called Hawkeye. Hawkeye is based on residual clustering, an unsupervised anomaly detection method for multivariate time-series data. To ensure accurate anomaly detection, a trend-capturing prediction module is also combined with an automatic labeling module. As a result, the most common information can be learned from multivariate time-series data to reconstruct data trends. By evaluating Hawkeye on public datasets and real-world offshore wind turbine operational datasets, the results show that Hawkeye’s F1-score improves by an average of 14% compared with Isolation Forest, and its size shrinks by up to 11.5 times on the largest dataset compared with other methods. The proposed Hawkeye is potential to real-time monitoring and early warning systems for wind turbines, accelerating the development of intelligent operation and maintenance.
Dec. 25, 2024Vol. 22 Issue 4 100285 (2024)

V. Sidda Reddy, G. Ravi Shankar Reddy, and K. Sivanagi Reddy
Processing underwater digital images is critical in ocean engineering, biology, and environmental studies, focusing on challenges such as poor lighting, image de-scattering, and color restoration. Due to environmental conditions on the sea floor, improving image contrast and clarity is essential for underwater navigation and obstacle avoidance. Particularly in turbid, low-visibility waters, we require robust computer vision techniques and algorithms. Over the past decade, various models for underwater image enrichment have been proposed to address quality and visibility issues under dynamic and natural lighting conditions. This research article aims to evaluate various image improvement methods and propose a robust model that improves image quality, addresses turbidity, and enhances color, ultimately improving obstacle avoidance in autonomous systems. The proposed model demonstrates high accuracy compared to traditional models. The result analysis indicates the proposed model produces images with greatly improved visibility and exceptional color accuracy. Furthermore, research can unlock new possibilities for underwater exploration, monitoring, and intervention by advancing the state-of-the-art models in this domain.
Dec. 25, 2024Vol. 22 Issue 4 100286 (2024)

Yan Guo, Hong-Chen Liu, Fu-Jiang Liu, Wei-Hua Lin, Quan-Sen Shao, and Jun-Shun Su
Named entity recognition (NER) is an important part in knowledge extraction and one of the main tasks in constructing knowledge graphs. In today’s Chinese named entity recognition (CNER) task, the BERT-BiLSTM-CRF model is widely used and often yields notable results. However, recognizing each entity with high accuracy remains challenging. Many entities do not appear as single words but as part of complex phrases, making it difficult to achieve accurate recognition using word embedding information alone because the intricate lexical structure often impacts the performance. To address this issue, we propose an improved Bidirectional Encoder Representations from Transformers (BERT) character word conditional random field (CRF) (BCWC) model. It incorporates a pre-trained word embedding model using the skip-gram with negative sampling (SGNS) method, alongside traditional BERT embeddings. By comparing datasets with different word segmentation tools, we obtain enhanced word embedding features for segmented data. These features are then processed using the multi-scale convolution and iterated dilated convolutional neural networks (IDCNNs) with varying expansion rates to capture features at multiple scales and extract diverse contextual information. Additionally, a multi-attention mechanism is employed to fuse word and character embeddings. Finally, CRFs are applied to learn sequence constraints and optimize entity label annotations. A series of experiments are conducted on three public datasets, demonstrating that the proposed method outperforms the recent advanced baselines. BCWC is capable to address the challenge of recognizing complex entities by combining character-level and word-level embedding information, thereby improving the accuracy of CNER. Such a model is potential to the applications of more precise knowledge extraction such as knowledge graph construction and information retrieval, particularly in domain-specific natural language processing tasks that require high entity recognition precision.
Dec. 25, 2024Vol. 22 Issue 4 100287 (2024)

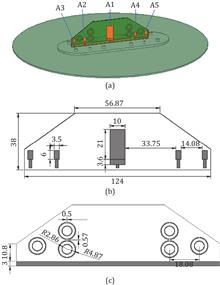
Yuan Zhang, Dong-Jun Wang, Chuan Wu, Qiang-Ming Cai, Run-Ren Zhang, Rong-Qiang Li, Peng Gao, and Yan-Wen Zhao
A dual-band and high-isolation shared-aperture antenna for unmanned aerial vehicle (UAV) platforms has been proposed. This shared-aperture antenna consists of a rectangular monopole antenna and a 4-element multiple input multiple output (MIMO) antenna. In order to increase the isolation, several double split ring metamaterial (MTM) structures are introduced between antenna elements. The antenna radiator and the MTM structure are located on the front and back of the same dielectric substrate, respectively, and are perpendicular to a circular metal plate. The overall size of the antenna substrate is 124 mm×38 mm×1.016 mm. Moreover, the antenna prototype is constructed and measured, and the simulated and measured results are in good agreement. The measured results show that the –10 dB bandwidth of the monopole antenna is 1.92 GHz to 2.75 GHz, and the common –6.0 dB bandwidth of the MIMO antenna element is 4.75 GHz to 4.91 GHz, covering 2.2 GHz to 2.4 GHz in the S-band and 4.8 GHz to 4.9 GHz in the 5G band, respectively. In the 5G band, the isolation between any element of the MIMO antenna and the S-band monopole antenna is not less than 21 dB, and the isolation between the MIMO antenna elements is better than 23 dB, indicating t–hat the isolation between the antenna elements is high. The proposed antenna is suitable for the application on UAV airborne platforms.
Dec. 25, 2024Vol. 22 Issue 4 100288 (2024)
Jun Chen, Feng Yang, Sheng-Jian Zhao, Xiao-Bo Shi, Ming Huang, and Shi-Wen Yang
Against the backdrop of electromagnetic space integration, the radio system of equipment platforms, such as next-generation aircraft, must possess multifunctional integration and electromagnetic stealth performance. Meanwhile, the equipment platforms need to evolve towards flat structures. These requirements pose significant technical challenges for antenna system design. The antenna must possess ultra-wideband to facilitate multi-function integration through the use of continuous radio frequency synthetic aperture. In order to ensure good aerodynamics of the flat airborne platform, it is required to implement conformal design, while the ultra-low profile is the greatest challenge in conformal design. Against this background, this work proposes a novel airborne tightly coupled antenna with ultra-low profile, ultra-wideband, and vertical-polarized omnidirectional radiation. The antenna unit utilizes a long slot structure and implements circular conformal design, where the resistive frequency selection surface is used to expand the operating bandwidth. This antenna has a profile height of only 0.047 times the low-frequency wavelength. Simulation and measurement results show that it achieves an impedance bandwidth of nearly 12∶1 with omnidirectional beam coverage, which meets the requirements of multifunctional future airborne antennas.
Dec. 25, 2024Vol. 22 Issue 4 100289 (2024)

© Copyright 2018-2021 | Chinese Laser Press.
All Rights Reserved 沪ICP备15018463号-20