








Please enter the answer below before you can view the full text.


2022
Volume: 17 Issue 4
28 Article(s)

Bo XU, and Zhaoyang WANG
Unmanned surface vessel (USV) based cross-domain heterogeneous formation cooperative navigation is an important method for overcoming the difficulties of navigation and positioning facing in the three areas of water surface, underwater and air in the future. This paper reviews related issues in the field of USV based cross-domain heterogeneous formation cooperative navigation from three aspects. First, this paper describes the development of USV at home and abroad, the concept and research progress of USV based cross-domain heterogeneous formation, and analyzes the cooperative navigation methods of USV based cross-domain heterogeneous formation, and summarizes them from three aspects: surface/underwater co-location, air-sea visual navigation, and path planning. Finally, it points out the key technologies and future development trends of USV based cross-domain heterogeneous formation.
Aug. 20, 2022Vol. 17 Issue 4 1 (2022)
Jiaxuan YANG, Baiguo CHEN, and Lingqi MA
Objectives Aiming at the unstable error of the extended Kalman filter (EKF) and the limited representation ability of a single motion model in a scenario involving complex changes of a ship's motion state, a ship trajectory tracking algorithm based on an interactive multi-model (IMM) square root cubature Kalman filter (SCKF) is proposed. MethodsThe SCKF is introduced to replace the EKF in performing the trajectory tracking of automatic identification system (AIS) data; the constant velocity model (CVM), current statistical model (CSM) , constant turn rate model (CTM) and improved CTM are combined using an interactive multi-model framework, and three combined models are constructed to characterize the motion state of the AIS trajectory. Trajectory tracking experiments are carried out using the three combined models.ResultsThe results show that in Trajectory 6, the root mean square error (RMSE) of the position information of the SCKF is smaller than that of the EKF, and the accuracy is improved by 30.06% when Combined Model 1 is used to track the trajectory with varying heading, heading rate and velocity; and when using Combined Model 3, the SCKF has the smaller fluctuation range of RMSE compared to the position information using the EKF in Trajectory 6, and the error value is reduced by 60.80%. Combined Model 3 has the best performance, but its computation is large. In a complex trajectory experiment at constant velocity, the performance of Combined Model 2 is close to that of Combined Model 3. ConclusionsThe proposed method can improve the accuracy of AIS data and ensure the stability of AIS data error fluctuation, making it possible to improve ship motion tracking and monitoring.
Aug. 20, 2022Vol. 17 Issue 4 12 (2022)
Qiang ZHANG, Yaping ZHU, Xiangfei MENG, Shuhao ZHANG, and Yancai HU
ObjectiveAiming at the problems of dynamic uncertainty and unknown disturbance in the trajectory tracking control of underactuated surface ships, an adaptive neural network finite time trajectory tracking control scheme is designed. MethodThe underactuated variation is carried out using the method of kinematic virtual control law transformation and bounded constraints. Under the framework of Backstepping, neural networks are used to reconstruct unknown dynamics, and an adaptive law is designed to approach the upper bound of unknown disturbances. The Lyapunov direct method provides a rigorous theoretical analysis which proves that all the signals of the closed-loop system are bounded, and the tracking error converges to a bounded interval. ResultsThe simulation results show that this control scheme can make an underactuated ship track the desired trajectory in a limited time, the convergence speed of the system error is faster than that of the traditional control scheme, and the upper and lower bounds of the error are also smaller. It also shows good robustness in the face of unknown time-varying interference from the outside world. ConclusionThe results of this study can provide valuable references for the tracking and control of ship trajectories, giving it great practical engineering significance.
Aug. 20, 2022Vol. 17 Issue 4 24 (2022)
Qingdong CHU, Yibo YIN, Xiaoxuan GONG, Lu LIU, Dan WANG, and Zhouhua PENG
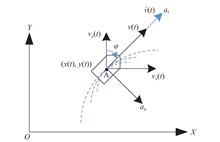
ObjectiveThis paper aims to improve the transient control performance of target tracking and guidance for under-actuated unmanned surface vehicles (USVs) by proposing a target tracking guidance method based on two-dimensional dipolar vector fields. MethodsThe angular velocity and forward velocity guidance laws of the USV are designed on the basis of the two-dimensional dipolar vector field principle. Stability analysis is carried out to prove that the control system is bounded and stable. Finally, the validity of the proposed method is verified through simulation and experiment. ResultsThe tracking position is shown to be convergent to the neighborhood near the target. This method not only makes the tracking trajectory smoother and provides better transient control performance, but it also achieves target tracking while maintaining the desired heading. Conclusions The proposed method can overcome the limitations of target tracking and guidance methods by eliminating cases in which a steady-state heading cannot be specified.
Aug. 20, 2022Vol. 17 Issue 4 32 (2022)
Wenkui LI, Zhu ZHOU, Aiqi HUAN, and Yuxuan XIA
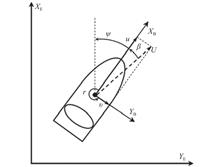
ObjectiveThis paper aims to study the problem of nonlinear six-degrees-of-freedom (DOFs) autonomous underwater vehicle (AUV) trajectory tracking. MethodsTo this end, the line-of-sight (LOS) guidance law of three-dimensional trajectory with variable forward-looking distance is designed, and the stability of the guidance law is proved by Lyapunov stability criterion, and the adaptive S-plane control is used to control the heading, trim angle and longitudianal velocity of AUV. Moreover, taking the REMUS 100 AUV as an example, Matlab-based simulation on the control of the heading, trim angle and longitudinal velocity and the space straight line and curve trajectory tracking are carried out to verify the validity of the proposed LOS guidance law. ResultsThe results show that, for the nonlinear AUV control, compared with the traditional S-plane control, the adaptive S-plane control can reduce the difficulty of tuning control parameters and has stronger anti-jamming ability. Compared with the traditional LOS guidance law, the designed LOS guidance law can make AUV track the reference trajectory faster. ConclusionsThe designed trajectory tracking control algorithm can realize the three-dimensional trajectory tracking for AUV, and be used to improve the vehicle's maneuverability.
Aug. 20, 2022Vol. 17 Issue 4 38 (2022)
Yiyan ZHANG, Wei MA, and Bin LI
Objectives Unmanned aerial vehicles (UAVs) can perform target identification and provide ships with detailed images of the target area. In order to realize the rapid data acquisition and unloading of UAVs as a means of high-altitude communication at sea, this paper proposes a 3D trajectory optimization method for UAVs based on the hp-adaptive pseudospectral method under multiple constraints with the goal of minimizing the communication task time.MethodsThe method first models the dynamics of a fixed-wing UAV in 3D space and describes the trajectory optimization problem of its communication as a state-constrained optimal control problem. Based on the ship motion model, a channel model is established in combination with the positioning error of the moving target; considering the energy limitations of the UAV, the communication constraints and energy constraints are added on the basis of the original problem, and a trajectory optimization method based on the hp-adaptive Radau pseudospectral method is proposed, which transforms the original problem into a finite-dimensional nonlinear programming problem and solves it. The simulation analysis is carried out under five constraint scenarios, then compared with the results of the p-pseudospectral method.ResultsGiven positioning error, the UAV and ship can still communicate rapidly under various constraints. ConclusionsThe results of this study provide an effective solution for maritime communication systems and provide references for the trajectory optimization problem in communication between UAVs and ships.
Aug. 20, 2022Vol. 17 Issue 4 47 (2022)
Fengchuan YIN, Xiaolong LIANG, Hao TAO, Yueqi HOU, Duo QI, and Xianning WU
ObjectiveIn order to solve the problem of time cooperative path planning for unmanned marine system (UMS) in complex environments, we propose a cooperative path planning method based on a differential evolution (DE) algorithm. MethodsFirst, natural environment and enemy threat models in the air, sea and underwater are established. The objective function of path planning with multiple constraints is constructed and a strategy proposed to solve the time coordination problem under the constraints of heterogeneous platforms starting at different times and places, but arriving at the same time and place. Next, a DE algorithm is used to optimize the solution, and the influence of the number of waypoints on the success rate of the planning is studied. ResultsBased on the reasonable selection of the number of waypoints, the DE algorithm can respectively plan the path that satisfies the time cooperative constraint for the UMS and find the shortest time to reaching the target in complex environments with multiple threats and obstacles. The results also show that either excessive or inadequate numbers of waypoints will result in success rate reduction of the path planning. ConclusionsThe results of this study show that the model and constraint conditions are reasonable, and the proposed algorithm can solve the problem of time coordination in the path planning of UMS, which has great practical application value.
Aug. 20, 2022Vol. 17 Issue 4 57 (2022)
Peng GAO, Lei WAN, Yufei XU, Guofang CHEN, and Ziyang ZHANG
ObjectivesAiming at the problem of the point stabilization control of a benthic autonomous underwater vehicle (AUV) under unknown disturbances and uncertainties, a fixed-time backstepping controller based on a fixed-time extended state observer (FTESO) is designed. MethodsFirst, according to the point stabilization tracking error model of AUVs, a new FTESO is proposed to estimate the unknown disturbances and unmeasurable velocity, and the observation error can be converged to zero in a fixed time. Based on the above observer, a fixed-time point stabilization controller is then designed using the backstepping method. Finally, by adding a first-order filter, the inherent complexity explosion of the backstepping controller is solved, and the semi-global fixed-time uniform ultimate boundedness of the closed-loop system is proven by Lyapunov stability analysis. ResultsThe feasibility and superiority of the proposed scheme are verified by simulation experiments. ConclusionsThe results show that the proposed scheme can solve the point stabilization control problem of a benthic AUV affected by unknown disturbances and uncertainties, and improve the convergence time of the control system.
Aug. 20, 2022Vol. 17 Issue 4 71 (2022)
Jie JIAN, and Zhiyu ZHU
ObjectivesIn order to improve the global localization accuracy and the real-time localization information in the cooperative localization of the autonomous underwater vehicle (AUV) system under clutter interference, a local information fusion algorithm based on information gain is proposed. MethodsThe gross error of the observed value is improved by the threshold weighting method, and then the local information is filtered to optimize the observed value so that it is closer to the true value. In this paper, the reliability of each piece of measurement information is investigated from the information entropy theory, and multiple sets of local filtering information of multiple master underwater vehicles are optimized. Taking the information gain as the weight, multiple sets of filtering results are fused to generate the unique localization information of the tested slave AUV. Furthermore, due to the communication delay in sonar detection and underwater acoustic signals between master and slave AUVs, filtering data asynchrony may occur in local information filtering and the information gain fusion algorithm. In view of this, a parallel structure of local information filtering and information gain weighting is proposed, which utilizes a real-time update mechanism to ensure that the input values of the information weighting algorithm are the latest output values of local filtering. ResultsThe simulation results show that compared with multi-source local filtering information, the proposed fusion method can effectively reduce the absolute error of local filtering, improve the localization accuracy, and optimize the local filtering. ConclusionsThe proposed fusion method can effectively realize the cooperative localization of the multi-AUV system.
Aug. 20, 2022Vol. 17 Issue 4 79 (2022)
Daheng ZHANG, Yingjun ZHANG, and Chuang ZHANG
ObjectiveIn response to international fuel oil price fluctuations and the need to reduce greenhouse gas emissions, a meteorological shipping route decision-making system based on an BP neural network is proposed for ship managers to improve their ship operation efficiency while considering economic and environmental factors. MethodFirst, seven kinds of operational data, namely ship speed, revolutions per minute (RPM), mean draft, trim, cargo quantity, and influence of wind and waves, are extracted from the log-book and noon report, and the ship's fuel oil consumption is predicted by the BP neural network. A meteorological shipping route decision-making system based on the improved Dijkstra algorithm is then used to obtain the optimal route. ResultThrough the experimental analysis of a 12 335 gross ton multi-purpose vessel on the Yingkou-Incheon route, the goodness of fit between the predicted fuel consumption by BP neural network method and the measured value is 79.97%, the prediction effect is good; and meteorological shipping routes of 15 and 17 kn are obtained by the decision-making system. ConclusionThe meteorological shipping routes obtained by the decision-making system based on an BP neural network are more accurate and reliable. The results of this study can provide technical support for ship owners and maritime management departments in reducing fuel oil consumption and CO2 emissions.
Aug. 20, 2022Vol. 17 Issue 4 98 (2022)
Lijia CHEN, Wei ZHOU, Yi XU, Tianming WEI, and Yanfei TIAN
Objective In order to solve the problems of the large communication data volume and high transmission delay of unmanned surface vessels (USVs), a USV multi-constrained network transmission routing algorithm (USMCRA) is proposed under the software-defined network (SDN) architecture suitable for USVs.MethodBy establishing a USV network model with SDN architecture, the routing problem in the network is transformed into a multi-constrained shortest path problem, and the algorithm is used to select the appropriate routing node to complete the data transmission. Obtain the state information in the network link through the SDN controller, take the bandwidth, delay and data stream size as constraints, and implement this algorithm in combination with the Dijkstra algorithm design. In the simulation experiment, the USV network model is built through the mininet simulation platform, and the USMCRA algorithm is designed in the RYU controller to realize the network simulation. ResultsThe results show that the routing algorithm improves the transmission efficiency and stability of a USV network. Compared with the traditional network architecture, the network transmission rate with the USMCRA algorithm is increased by about 16%, and the peak value of the network jitter is controlled at 0.2 ms, realizing network optimization.Conclusion The proposed USMCRA algorithm provides a new solution for the problems of large communication data volume and high transmission delay experienced by USVs.
Aug. 20, 2022Vol. 17 Issue 4 107 (2022)
Xin ZHOU, Rongwu XU, Guo CHENG, Ruibiao LI, and Wenjing YU
Objective Based on the vibration data of underwater structures and passive sonar equations, a method for evaluating the detected state and maximum detected distance of underwater structures is proposed, thereby solving the problem in which it is difficult to quickly estimate the sound source level and evaluate the detected state of underwater structures. MethodsThe operational transfer path analysis (OTPA) method is used to forecast the self-noise level of underwater targets in real time. Singular value decomposition (SVD)and principal component analysis (PCA) are used to eliminate errors such as the crosstalk of measurement data. Combined with the propagation characteristics and environments of underwater sound waves, the detected state and maximum detected distance of underwater structures in the current environment are evaluated by the detection model.ResultsThe validity of the detection model is demonstrated in a lake test which determines that it has an average error of less than 2 dB, and the estimated detected state and maximum detected distance are in good agreement with the measurement results in most frequency bands. ConclusionThis study can provide a basis for assessing the acoustic stealth situation of underwater structures.
Aug. 20, 2022Vol. 17 Issue 4 114 (2022)
Yahai SHU
ObjectivesIn order to meet the different performance requirements of ship-based integrated RF antennae for next-generation surface warships, such as high performance, low scattering and hull conformance, an optimization method for a conformal antenna combining the electromagnetic simulation and intelligent optimization methods is presented and applied in the design of an embedded array with a specific frequency band.MethodsBy improving the traditional particle swarm optimization (PSO) algorithm asynchronously and incrementally, discrete variables and continuous variables are processed at the same time, effectively accelerating the convergence speed of the PSO. Aiming at a VHF antenna on a surface ship, the objective function of the multi-dimensional parameter optimization of the complex antenna structure is constructed, and the semi-embedded installation forms of the synchronous optimization of multi-objective characteristics such as antenna gain, standing wave ratio and radar cross section (RCS) are obtained. ResultsAfter several rounds of simulation and iterative optimization, the antenna gain is increased by about 1 dB, the standing wave ratio is slightly improved and the RCS peak point reduction of the typical azimuth reaches 32 dB.ConclusionsThis method can provide references for the conformal ship mounting design of RF antennae for ships and the integrated design of complex large-scale systems.
Aug. 20, 2022Vol. 17 Issue 4 121 (2022)
Kaicheng HUANG, Li'an BIAN, Yu LIU, Yaokun WANG, and Yingjie HONG
ObjectivesWith increasing congestion and interference facing shipborne wireless communication equipment, it is urgent for antennae functions to be reconstructed. This study proposes a microstrip Quasi-Yagi antenna with a continuously reconfigurable cross-band frequency function. MethodsFirst, PIN diodes are loaded on the quasi-Yagi antenna, and multi-band multi-mode switching is realized by controlling turning the diodes on/off. Second, by attaching snowflake split-ring resonator (SRR), the antenna gains two stable frequency resonance points and a stable radiation azimuth. ResultsAccording to the simulation and measurement results, the antenna realizes frequency reconfiguration in the C-band (5.77–7.10 GHz and 7.40–7.56 GHz) and X-band (8.33–8.64 GHz and 8.76–9.27 GHz). Its radiation pattern can stably point in the direction of capacitive loading conduction, with gain above 5.7 dBi at each frequency and an average 3 dB beamwidth value of 102°. ConclusionsBy loading PIN diodes on the antenna and attaching a snowflake SRR, cross-band frequency becomes frequency reconfigurable, and beam deflection with low error is achieved, thereby improving the spectral utilization of ship systems and avoiding coupling interference between multiple antennae.
Aug. 20, 2022Vol. 17 Issue 4 126 (2022)
Pan CHEN, and Gaosheng LI
ObjectivesIn order to effectively improve the gain and bandwidth of antennae, a low-cost and tunable stacked microstrip antenna based on ferrite is proposed for WLAN.MethodsBy adopting magnetic ferrite as the substrate of the microstrip antenna, its performance and response to external electromagnetic fields can be adjusted. Its directional characteristics can also be tuned via a laminated substrate structure to improve the gain. By arranging elliptical parasitic patches in a clockwise direction around the metal patch, the bandwidth characteristics of the antenna can be effectively improved.ResultsThe measured data and simulation results are in good agreement, covering the entire frequency band range of 5.15–5.35 GHz in the WLAN system. According to the test results, the relative bandwidth of the antenna in the C-band is 19% and its highest gain is 9.15 dBi.ConclusionsThe results of this study can provide references for the design of miniaturized and magnetically tunable antennas.
Aug. 20, 2022Vol. 17 Issue 4 134 (2022)
Songzi GUO, Jun MA, Zhiyin LI, and Jinhua ZHANG
ObjectivesOver millions of years of natural selection, fish have evolved various types of swimming modes with various advantages in efficiency, motility and tranquility, making them ideal biological objects on which autonomous underwater vehicles (AUVs) can be modelled. In order to develop a brand new AUV with lower noise and higher mobility, this paper puts forward a design for a myliobatid-inspired robot actuated by pairs of flexible pectoral fins.MethodsThe manufacturing process and actuating method of the prototype are illustrated in detail. In order to test the maximum speed and mobility of the prototype, a series of swimming tests is carried out.ResultsThe experimental results show that the prototype can complete a variety of maneuvers in water, including rolling, small radius steering and hovering, and its maximum swimming speed can reach 1.9 body lengths per second (about 0.73 m/s).ConclusionsThis paper outlines the preliminary design and swimming test of a myliobatid-inspired robot, giving it reference value as an indicator for the next generation of AUVs.
Aug. 20, 2022Vol. 17 Issue 4 139 (2022)
Jin WU, Mingqiang DAI, Junjie WANG, Shanshan YU, and Minghui YU
ObjectivesAiming at the operation support scheduling of carrier-based aircraft, this paper proposes a scheduling optimization algorithm based on apprenticeship learning which can quickly generate a operation support schedule for a carrier-based aircraft fleet. MethodsUsing the apprenticeship learning method, the executed and unexecuted tasks in expert demonstrations are compared in pairs to construct a sample set, and the support task scheduling classifier is trained based on the deck features of aircraft carrier. On this basis, a support task apprenticeship learning algorithm for a carrier-based aircraft fleet is designed and compared with the traditional genetic algorithm (GA) in terms of solving solution, solving time and resource allocation. ResultsThe results show that the operation support schedule obtained by the apprenticeship scheduling algorithm is equivalent to that by the traditional GA, but the rate of convergence is increased nearly fourfold, and the support resources are more evenly distributed. ConclusionsThe apprenticeship scheduling algorithm proposed in this paper can adequately learn from expert experiences and solve the problem of static single-objective carrier-based aircraft support scheduling. As such, this study provides references for further research in the field of dynamic multi-objective carrier-based aircraft support scheduling.
Aug. 20, 2022Vol. 17 Issue 4 145 (2022)
Jianxin CHEN, Yuluo HUANG, Meng NING, and Guanfeng LI
ObjectivesThe disorder of different types of slotting equipment occurs during the use of an automated 3D warehouse, affecting the efficiency of subsequent material support. Therefore, it is necessary to carry out research on the slotting optimization of automated 3D warehouses.MethodsFirst, a slotting optimization model is established to minimize the inventory time and distance of the same group of goods after analyzing the operation characteristics of the automated 3D warehouse. Next, in order to overcome the shortcomings of the traditional Monte Carlo Tree Search (MCTS) algorithm that tends to fall into local optimality, a simulated annealing algorithm is integrated with the MCTS algorithm to optimize the node selection operation. Finally, the improved MCTS algorithm is tested for its optimization, stability and convergence.ResultsThe improved MCTS algorithm is at least 30% more optimized than the greedy, Rubik's cube reduction and traditional MCTS algorithms in terms of slotting optimization running time. ConclusionsBy adding the optimal path random selection factor to the MCTS algorithm, it can be prevented from falling into local optimality, effectively achieving slotting optimization.
Aug. 20, 2022Vol. 17 Issue 4 155 (2022)
Hui YAN, and Guohua ZHOU
ObjectivesThis study proposes a measurement scheme based on the Kalman filtering method for improving efficiency and lowering complexity in measuring the magnetization parameters of shipboard three-component geomagnetic field measurement systems. MethodsThe principles and characteristics of magnetization in the mathematical model of a shipboard three-component geomagnetic field measurement system are studied. The steps for applying the Kalman filtering algorithm are used to compute the ship's magnetization parameters. Then, computer simulation and mockup experiment were conducted to testify its validity. ResultsThe simulation and experiment show that the three-component geomagnetic field can be computed precisely, and the algorithm performs well in convergence with a small sampling of data. ConclusionsTherefore, the Kalman filtering method has higher efficiency and lower cost in the practice of measuring a ship's magnetization parameters.
Aug. 20, 2022Vol. 17 Issue 4 164 (2022)
Zhen WANG, Senlin ZHU, Yinshui LIU, and Liangcai LI
ObjectivesAiming at the problems of the long response time and excessive time consumption of infrared cooling equipment, an optimization study is carried out.MethodsA special cooling method based on the combined effects of absorption, scattering of water mist particles and cooling of water film is proposed to attenuate the infrared radiation intensity of the target object and improve the response speed of the infrared cooling system. The infrared cooling characteristics of the composite nozzle and water film nozzle at different pressures are analyzed through comparative design experiments.ResultsThe test results show that under water supply pressures of 0.3, 0.5 and 0.8 MPa, the infrared cooling time of the composite nozzle is reduced by 27.9%, 47.3% and 46.2% respectively compared with that of the water film nozzle. At the moment the water mist is sprayed, the temperatures measured by the infrared thermal imaging camera are 8.62, 11.13 and 11.09 ℃ lower than the actual temperature of the target.ConclusionsThe test results show that the swirling atomizer composite nozzle can effectively control the infrared cooling time of the target object.
Aug. 20, 2022Vol. 17 Issue 4 170 (2022)
Xiaojie LAN, Weiwen ZHAO, and Decheng WAN
ObjectivesPoiseuille flow widely exists in the industry, but the stability and reliability of the moving particle semi-implicit (MPS) method in the simulation of wall shear flow such as Poiseuille flow need to be verified. MethodsThe meshless solver MLParticle-SJTU, which was developed independently based on the MPS method, is used to simulate Poiseuille flow in 2D pipes under different Reynolds numbers by establishing the inflow boundary and no-slip wall boundary, and the fluid is an incompressible Newtonian fluid. The numerical simulation results and theoretical results are then compared to verify the accuracy of the former. ResultsThe results show that the velocity profile of Poiseuille flow is parabolic when the flow is fully developed, and the error of the numerical simulation results is within 5% compared with the theoretical results under different Reynolds numbers. ConclusionThis study shows that the MPS method is effective and reliable for simulating 2D Poiseuille flow under the boundary conditions proposed in this paper.
Aug. 20, 2022Vol. 17 Issue 4 177 (2022)
Zejiang FANG, Junzhe TAN, Guangying JI, Peng YUAN, Ze SUN, and Shujie WANG
Sail systems and aerodynamic performance are important factors for determining the dynamic performance of unmanned sailboats. First, in order to identify the future trends of the flexible sails of unmanned sailboats, representative unmanned sailboats with flexible sails in the world are reported. The flexible sail system is then summarized in terms of physical characteristics, installation and fixing schemes, and sail trim schemes. The progress of three research methods of numerical simulation, wind tunnel test and sea trial for aerodynamic performance are analyzed respectively, and the basic technical route for research on the aerodynamic performance of flexible sails is summarized. Finally, several future key technologies of unmanned sailboats and flexible sails are predicted.
Aug. 20, 2022Vol. 17 Issue 4 183 (2022)
Xiedong LUO, Dongliang MA, Songlin ZHANG, and Deyu WANG
Objectives With the development of intelligent ships, it has been difficult for traditional crack damage detection methods to meet the detection requirements. This paper proposes a real-time crack damage detection method for box girders based on a gated recurrent unit (GRU) neural network. MethodsUsing the secondary development technology of Abaqus based on the Python language, a box girder crack damage model is built, and its acceleration response under dynamic Gaussian white noise excitation is calculated. A dataset is generated by expanding the original data using the data cropping method, and the influence of noise is considered. A box girder crack damage detection model based on GRU is established, the acceleration response dataset is directly used as input and the minimum loss function value is used as a target to train the model. This method is then compared to the wavelet packet transform-based multi-layer perceptron (WPT-MLP) model. ResultsThe comparison shows that the GRU model proposed in this paper has higher detection accuracy than the WPT-MLP model in damage location and extent detection. It is less sensitive to noise and has higher accuracy in approximate prediction. ConclusionsThe results of this study verify the applicability of GRU neural networks in the crack damage detection of box girders containing multiple plates.
Aug. 20, 2022Vol. 17 Issue 4 194 (2022)
Huwei CUI, and Qiyin DING
ObjectivesIn order to improve the accuracy of nonlinear numerical simulation of the ultimate load-bearing behavior of a hull stiffened plate, the effects of ideal elastoplastic, isotropic hardening and cyclic plastic Chaboche material models on the plastic yield distribution, compression and tensile ultimate strength of stiffened plates in their ultimate state are studied. MethodsFor a stiffened plate of the same size, ANSYS software is used to carried out non-linear finite element numerical simulation of ultimate bearing performance under axial cyclic compression and cyclic compression-tension loads. ResultsThe results show that different material properties have a significant impact on the ultimate bearing capacity of stiffened plates and the plastic yield distribution in the ultimate state. When carrying out nonlinear finite element numerical simulation of the ultimate bearing behavior of a hull stiffened plate, it is necessary to select the appropriate material model according to different load forms. ConclusionsThe results of this study can provide valuable references for further research on the ultimate strength characteristics and cumulative plastic failure mechanisms of hull structures under cyclic loading.
Aug. 20, 2022Vol. 17 Issue 4 204 (2022)
Xiangdong CAI, Yao ZHAO, Zhenshuai WEI, and Lichun CHANG
ObjectivesIn research on the automatic forming of ship bidirectional curvature plates, the calculation method of in-plane strain and out-of-plane strain distribution is an important problem. In light of the limitations of existing methods of calculating strain, a new method is proposed that can improve the calculation accuracy of the strain distribution of ship bidirectional curvature plates. The new method has high calculation efficiency and meets the needs of engineering applications.MethodsTaking a circular flat plate as the research object, the secondary development of a subroutine in finite element software is carried out, and the displacement field load is gradually applied, improving the accuracy of strain distribution calculation. Considering that the actual machining process is an elastoplastic deformation process, the influence of material nonlinearity on strain distribution is discussed. From the perspective of calculation accuracy and efficiency, the applicability of various calculation methods is discussed.ResultsThe subroutine-based calculation method solves the problems of insufficient precision, complex modeling and low calculation efficiency of existing methods. From the perspective of calculation efficiency, it is recommended to use the elastic large deformation finite element method to calculate the strain. For target shapes with different curvature radii, several reasonable suggestions are given for the selection of calculation method.ConclusionsThe proposed method can quickly provide accurate strain distribution calculations for the automatic forming systems of ship bidirectional curvature plates, giving it practical engineering application value.
Aug. 20, 2022Vol. 17 Issue 4 212 (2022)
Mengmeng ZHOU, Bing ZHANG, Qiang ZHAO, Mengting PAN, and Siyu ZUO
ObjectivesThis paper proposes a multi-autonomous underwater vehicle (AUV) cooperative localization algorithm based on an adaptive fading Sage–Husa extended Kalman filter in order to increase the positioning accuracy of mult-AUVs during navigation. MethodsThe algorithm improves the adaptive filter in the filtering algorithm, obtains the estimated value of the innovation covariance through the weighting of the fading memory index, and introduces the fading factor to adjust the prediction error covariance matrix to achieve the purpose of adjusting the filter gain. The multi-AUV cooperative navigation model is established and the basic filtering process is obtained; through the fusion of speed and position information, an accurate estimation of the position state of the follower-AUV is achieved; finally, the algorithm and the expectation maximization-EKF (EM-EKF) and EKF algorithms are used in an AUV cooperative navigation model for simulation comparison.Results The results show that when the noise covariance does not match, the root mean square error (RMSE) of the proposed algorithm is reduced by 17.82% and 24.48% respectively, and the average localization error (ALE) is reduced by 17.87% and 22.54% respectively; when the noise covariance is time-varying, the RMSE of the proposed algorithm is reduced by 42.11% and 51.23% respectively, and the ALE is reduced by 34.87% and 46.90% respectively. Conclusions The proposed algorithm can effectively improve the reliability, accuracy and adaptability of filtering.
Aug. 20, 2022Vol. 17 Issue 4 92 (2022)
Bing SAN, Yue HOU, Jinyun PU, and Kangbo WANG
ObjectivesThe suddenness and rapidity of modern warship disasters have significantly intensified, and higher requirements have been put forward for the information level of the damage control (DC) command network. Based on the complex network characteristic analysis of a DC command information system, its network topology model is constructed. MethodsAiming at the shortcomings of the current model, based on the stochastic networking method and considering the node attributes of the DC command information network and the cost of increasing network density, a structural optimization method for optimal stochastic networking is proposed, and the specific optimization process is demonstrated by case simulation. ResultsThe results show that the command and facilities subnets have different influences on network performance, and the improved random networking method performs better than the traditional random method in network structure optimization. ConclusionsSubsequent research can start by changing the connection mode between subnets to solve the problem of the terminal node of the command subnet being too high, thereby further improving the comprehensive performance of the DC command information network.
Aug. 20, 2022Vol. 17 Issue 4 220 (2022)
Zhengqiong DONG, Shaokang TANG, Chenyang LI, Lei NIE, Xiangdong ZHOU, Shanting DING, and Yiyan FAN
Objectives The type and quantity of spare parts affect the security of equipment. As the space storage capacity of a ship is limited, an overabundance of spare parts cannot be carried. In order to improve the force-level support capability of equipment, a configuration method for the spare parts of naval gun equipment based on a multi-agent simulation is proposed. MethodsFirst, the functional structure and operation of a naval gun are simulated using multi-agent modeling; then, combined with the failure rate of each unit component, a Monte Carlo repetitive simulation experiment is carried out, and the relevant indicators of supporting resources such as spare part satisfaction and utilization rates are statistically calculated; finally, the spare part configuration scheme is evaluated based on the above indicators, and several trials are conducted to arrive at the optimal solution. A single 100 mm naval gun is used as an example for evaluating and optimizing the scheme.ResultsCompared with the basic scheme, the number of spare parts carried under the optimized scheme is greatly reduced, and the satisfaction rate of spare parts is almost the same.ConclusionsThe simulation results verify the effectiveness of the proposed method. As such, this study provides valuable references for the configuration scheme design of the spare parts of naval gun equipment.
Aug. 20, 2022Vol. 17 Issue 4 228 (2022)
© Copyright 2018-2021 | Chinese Laser Press.
All Rights Reserved 沪ICP备15018463号-20