






Please enter the answer below before you can view the full text.


2022
Volume: 17 Issue 1
25 Article(s)

Zongbin CHEN, Jian LIAO, and Banghui LIU
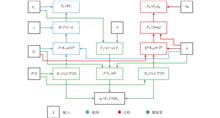
ObjectivesThe new type of electro-hydraulic steering gear with direct drive volume control is a typical system with large inertia and small damping. To solve the problem of control rapidity, stability and quietness contradicting each other, the engineering application of active disturbance rejection control (ADRC) for the electro-hydraulic steering gear is studied. MethodsFirst, the ADRC model of the electro-hydraulic steering gear is established and a transition process is designed to control the start-stop hydraulic impact. Next, a physical control test-bed is built, the stability of physical control is analyzed, the filtering effect of the algorithm is adjusted, an output filtering prediction module is added, and the big time delay of the electro-hydraulic steering gear is predicted and compensated. Finally, a comparative test of the algorithm control performance before and after optimization is carried out. ResultsThe experimental results show that, under the action of the improved ADRC control algorithm, the structural vibration of the electro-hydraulic steering gear in the start-stop transient state is reduced by about 6–10 dB, the position accuracy can be controlled within 1 mm, and the steering gear has good stability and followability under external interference such as load impact. ConclusionThe results of this study can provide references for the stability control and ADRC algorithms of systems with large inertia and small damping.
Feb. 10, 2022Vol. 17 Issue 1 166 (2022)
Jinhao ZHAN, Weibo LI, Qi LI, Zhenjie ZOU, and Wanfeng SUN
ObjectivesIn order to improve the safety and stability of a ship's power system, a risk assessment system based on a proportional pseudo time-series algorithm is proposed. MethodsAn improved pseudo time-series algorithm is introduced into the ship's power system to assign values to power analog quantities such as voltage, power and frequency, which can be visually monitored through the configuration interface; the risk assessment of the overall power system is then conducted. At the same time, in response to changes in system topology under different working conditions, the algorithm is adjusted by introducing proportional compensation coefficients to improve the accuracy of risk level assessment.ResultsThe actual test results show that this system can not only monitor the physical quantities of electric power in real time, but also accurately assess the risk status and level of the system.ConclusionsThe results of this study can provide references for the design of ship electric power risk assessment systems.
Feb. 10, 2022Vol. 17 Issue 1 176 (2022)
Lin SUN, Hui CHEN, and Cong GUAN
ObjectiveThere are multiple operation conditions for ships navigation in inland river waterway, such as sailing downstream, upstream as well as in rapid stream, but the traditional ship-engine-propeller matching method can only ensure that the inland ships meet the design requirements when they travels upstream. Under downstream conditions, the ship propulsion's efficiency and energy utilization rate of main engine are both low, resulting in high fuel consumption and less cost-effectivness. To this end, the optimal design of ship-engine-propeller matching for the inland ships under multiple conditions is carried out. MethodsFirst, the parameters of an inland ship's propulsion system under various conditions are designed, and the results are compared to ascertain the influence of each design parameter on the overall propulsion system. Then, the design process of the propulsion system is analyzed, and a mathematical model is established with navigation cost and propulsion system efficiency as the objective functions, and the design parameters of the propeller, main engine power and ship speeds (upstream & downstream) as variables. Finally, the main engine power and design parameters of propulsion system are determined balancing both economy and efficiency using the NSGA-II algorithm. ResultsThe design parameters obtained using this method are easily adapted to the traffic environment of inland ships, making them more economical. ConclusionThe results of this study can not only provide design tools for the selection of ship propulsion systems, but also provide a theoretical basis for its practical application.
Feb. 10, 2022Vol. 17 Issue 1 187 (2022)
Hanjiang SONG, Guolei ZHANG, and Shuai ZENG
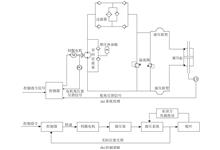
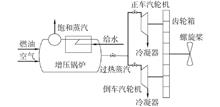
ObjectivesIn the process of the emergency deceleration and reversing operations of marine steam power systems, back-steam control technology is an effective means of alleviating the problem of boiler drum overpressure, so it is necessary to study its influence on the system. MethodsThis paper establishes a steam power system simulation model of a supercharged boiler, main steam turbine and propeller, and carries out the simulation and comparative analysis of the characteristics of back-steam control in the process of the emergency deceleration and reversing of large ships under the three working conditions of quick closing valve with/without back-steam and slow closing valve without back-steam. ResultsThe simulation results show that the steam return control technology can effectively prevent boiler drum overpressure in the process of emergency deceleration and reversing, and the system stability time is shortened by about 3 mins and 1 min respectively. ConclusionThe results of this study can provide references for ship maneuverability and safety design.
Feb. 10, 2022Vol. 17 Issue 1 196 (2022)
Shuaikang SHI, Xiuchang HUANG, Zhiqiang RAO, and Hongxing HUA
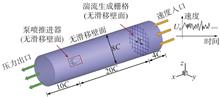
Objectives This paper aims to clarify the characteristics of the unsteady force spectrum of a pump-jet operating under inflow turbulence. MethodsThe turbulence grid and Fourier synthesis method are employed to produce inflow turbulence with spatial flow structure and temporal fluctuation, combined with large eddy simulation (LES) to obtain the broadband unsteady force spectrum of the pump-jet. ResultsThe results show that the proposed method can obtain the unsteady force broadband spectrum for the duct, stator and rotor. The unsteady force broadband spectrum of the pump-jet is composed of the ''humps'' around the blade passing frequency and its multiples, the characteristic line spectrum at the stator blade passing frequency and the shaft frequency of the adjacent stator multiples. As the number of blades increases, the ''humps'' become more obvious and the characteristic peaks change periodically and reach the minimum when the number of blades is equal to the number of rotors. Due to the use of the stator and duct, the amplitudes of the unsteady force broadband spectrum of the pump-jet are higher than those of the propeller, but the ''humps'' are not as obvious. ConclusionsThe results of this paper can be helpful for clarifying the unsteady force characteristics of a pump-jet induced by inflow turbulence, and provide ideas for the vibration and noise reduction of pump-jets.
Feb. 10, 2022Vol. 17 Issue 1 1 (2022)
Jitao QIU, Xiaohui YIN, and Renzhi WANG
ObjectivesThe effects of the key parameters of the inlet duct of a waterjet propulsor on its hydrodynamic performance are studied, providing references for the design of waterjet propulsors. MethodsBased on STAR-CCM+ software, the influence of the axis height and inlet angle of a waterjet inlet duct on its hydrodynamic performance under different intake velocity ratio (IVR) conditions is studied using steady Reynolds-averaged Navier-Stokes equations (RANS) numerical simulation. Numerical uncertainty analysis is carried out according to the international towing tank conference (ITTC) uncertainty analysis procedure. In this paper, the computational domain is discretized with hexahedral structured grids. The set of governing equations is closed using the Realizable k-ε two-layer turbulence model, and the discretization schemes are second-order accurate. The semi-implicit method for pressure linked equations (SIMPLE) algorithm is applied in the pressure-velocity coupling calculation. ResultsThe results show that the numerical uncertainty is less than 4%, indicating that the grids used in this paper yield well-converged and reliable numerical results. ConclusionsThe efficiency of the inlet duct is higher in the range of IVR = 0.7~1.1. For large IVR, the inlet angle should be reduced. For small IVR, the axis height can be appropriately increased to improve the homogeneity of flow at the exit of the inlet duct.
Feb. 10, 2022Vol. 17 Issue 1 11 (2022)
Lu HUANG, Yihong CHEN, Ke ZENG, and zhuqing LIU
Objective The cycloidal propeller is a special propeller which generates thrust by means of profiled blades that protrude from the hull of the vessel and rotate around a vertical axis, allowing precise and stepless thrust generation. It is necessary to study the hydrodynamic performance of cycloidal propeller in open-water and hull wake conditions. MethodsBy analyzing the operating principle of the cycloidal propeller, a formula for the multiple motion laws of the blades is derived. The open-water performance of the cycloidal propeller is then calculated using the RANS equations and $ k - \varepsilon $ turbulence model based on a sliding mesh. Comparison with the experimental data verifies the accuracy of the hydrodynamic performance prediction method of cycloidal propeller. The propellor's unsteady hydrodynamic performance in a ship's hull wake is also investigated. ResultsThe results show that the force on the cycloidal propeller and singular blade has blade frequency characteristics; the fluctuation amplitudes of the thrust and torque increase with the increase of the advanced coefficient; and the lateral force is significantly affected by the hull wake, while the thrust and torque are slightly affected. ConclusionsThe results of this study have important reference value for research on blade strength evaluation and blade design optimization.
Feb. 10, 2022Vol. 17 Issue 1 18 (2022)
Rui WANG, and Ying XIONG
ObjectivesIn order to develop a highly efficient method for propeller design optimization, the adjoint method is studied based on surface panel method.MethodsAn adjoint equation is established under the conditions of zero normal velocity of blade and equal-pressure Kutta to obtain a formulae for solving sensitive derivative problem. A DTMB 4381 propeller is used as the research objective to calculate the sensitive derivatives of propeller performance to design parameters using the adjoint method and traditional method respectively for solving governing equation. Next, an analysis of senstive derivatives on a ship propeller design is carried out based on the adjoint method.The sensitive derivatives are then obtained and applied to optimize the geometric parameters of the propeller, achieving the optimal solutions which are compared with that by particle swarm optimization (PSO) algorithm of ISIGHT.ResultsThe results indicate that the sensitive derivatives caluculated via the adjoint method are not only in good agreement with that by traditional method, but also offers much higher computation efficiency, generating optimal solutions of the propeller design superior to that by PSO algorithm with less time-consumption.ConclusionsThe research shows that the computation efficiency of the adjoint method is superior to traditional intelligent algorithms in multi-parameters optimization design of ship propellers.
Feb. 10, 2022Vol. 17 Issue 1 36 (2022)
Wei HE, Jiawei GUO, Xiaofei HU, Mingjing Liu, Tiechao BAI, and Ziru LI
ObjectivesThe influence of the geometrical parameters of propeller on its hydrodynamic performance in forward and astern mode of operation is studied by numerical simulation.MethodsTaking a 33 000 DWT oil product tanker as the application object, the hydrodynamic performance of a MAU-series propeller and three theoretical propellers operated in forward and astern mode is simulated using the RANS method combined with the Realizable k-ε turbulence model. The influence of the lift distribution coefficient, pitch and camber combination on the hydrodynamic performance of propeller in both operation modes are then discussed through comparison.ResultsThe results show that in forward and astern operation mode, the pitch of the blade will generate positive lift, whereas the camber of the blade will generate positive and negative lift alternately. Properly increasing the camber and reducing the pitch of the propeller in design is beneficial for improving its open water efficiency in forward operation mode. On the contrary, adopting the combination of a large pitch and a small camber is beneficial for increasing reverse thrust.ConclusionBased on the experimental data, suggestions on performacetrade-offs of designing a propeller in both operation modes are given.
Feb. 10, 2022Vol. 17 Issue 1 42 (2022)
Lei QIU, and Chaosheng ZHENG
ObjectivesThis paper aims to study the kinetic and dynamic characteristics of an trans-media unmanned vehicle during vertical take-off from water.MethodsIts dynamic performance during the trans-media process from water to air is numerically simulated on the basis of the viscous computational fluid dynamics (CFD) approach combined with the overset grid technique, multiple degrees of freedom and dynamic fluid body interaction (DFBI) motion model.ResultsThe results show that in order to pull the vehicle up, the air propeller rotation speed should be higher than the speed at the same pull force provided by a single propeller. As the main movement of the vehicle is vertically upward, the coupling of the air propeller downwash flow velocity and the fuselage of the vehicle leads to the "quick bowing" phenomenon.ConclusionsTo ensure smooth take-off, a manual or automatic control program should be added to adjust the tilt angle of the thrusters in real time during the take-off process. This study provides a powerful evaluation method for the optimal design and control of trans-media unmanned vehicle in the future.
Feb. 10, 2022Vol. 17 Issue 1 51 (2022)
Hanbing SUN, Jiafeng XIAO, Wei WANG, Weijie LIU, and Xing ZHENG
ObjectivesAiming at balancing the cost and accuracy of ship maneuvering motion prediction, a numerical calculation based prediction approach is presented, combined with the sensitivity analysis of hydrodynamic derivatives. MethodsFirst, the numerical calculation is carried out by solving the RANS equations, employing the method of volume-of-fluid (VOF) to capture the free-water surface and putting constraints on the motion of DTMB 5415 model, additional comparison of the linear hydrodynamic derivatives obtained from the regression are conducted with the experimental data so as to verify the validity of the proposed numerical scheme. Furthermore, a ship maneuvering mathematical model of DTMB 5415 is established on the basis of the maneuvering mathematical model group (MMG) method, and the Runge-Kutta algorithm is utilized to solve the equations and the model's turning and zigzag maneuvering motions are simulated. Finally, the sensitivity of the hydrodynamic derivatives of the two maneuvering motions are analyzed. ResultsThe results show that the modelling results of ship motion trajectory and parameter for criteria obtained by the proposed methods are agree well with the experimental data, among which the average errors of the parameters of turning and zigzag maneuvering motion are 5.1% and 11.7% respectively. Compared with the results of the self-propelled ship model simulation using CFD, both the accuracy and cost are improved. The sensitivity analysis also verify that some nonlinear hydrodynamic derivatives have little influence on the maneuverability criterion, and can be estimated using empirical formulas. ConclusionsThe proposed method is feasible for ship maneuverability motions prediction, which can meet the engineering application precision and reduce the calculation cost greatly, especially suitable for the maneuverability motions prediction and optimization in ship design stage.
Feb. 10, 2022Vol. 17 Issue 1 60 (2022)
Ruiting CHU, and Zhiquan LIU
ObjectivesTo improve the performance of course tracking and reduce the course errors of an underactuated surface ship, a heading control method based on a finite-time extended state observer (FTESO) and sliding mode control algorithm is studied. MethodsA pre-filter is proposed to reduce the influence of the large rate of speed change when steering. The time-varying sideslip angle is estimated by FTESO, and course error is amended by the estimated sideslip angle in a timely manner. To simplify the design of the controller, external disturbance and internal uncertainty in the yaw direction are estimated by the observer simultaneously, and compensated for in the controller design. Considering input saturation, a sliding mode control law is designed by combining FTESO and a sliding mode surface with an integral term. The stability of the control system is proven by the Lyapunov theory. Results The simulation results show that the proposed controller reduces course tracking error and makes it converge to zero in a shorter time. ConclusionsThe results of this study can provide references for the course tracking control design of surface ships.
Feb. 10, 2022Vol. 17 Issue 1 71 (2022)
Yushun LIAN, Bin ZHANG, Jinhai ZHENG, Haixiao LIU, and Gang MA
ObjectivesAiming at a mooring system design with cost-effectiveness and high performance for wave energy converter (WEC) , the effects of such systems on the capability of power take-off (PTO) system and positioning performance of WEC are investigated.MethodsA two-body floating point absorber is chosen as the sample WEC. The open-source WEC-Sim and MoorDyn codes are used to design two types of mooring system for the WEC: one is a chain mooring system and the other is an integrated chain-rope (i.e., polyester fiber rope) mooring system. By performing time-domain analysis for the WEC with different mooring lines, the responses, such as WEC displacement, power take-off (PTO) and mooring line tension, are obtained respectively.ResultsThe results show that, the effects of mooring systems on the displacement response of the floater are small, but these effects on the response of the spar body is obvious. For the WEC with a linear damper, these effects on the PTO response are negligible. Moreover, the line tensions of the integrated mooring system are lower than the corresponding tensions of the chain mooring system under the operational sea state.ConclusionsThe results of this study have reference value for the improved design of WEC mooring systems.
Feb. 10, 2022Vol. 17 Issue 1 80 (2022)
Songtao CHEN, Weiwen ZHAO, Decheng WAN, and Yangyang GAO
ObjectivesIn order to explore the influence of the free surface and free end on the flow field around typical bluff bodies, the flow field around a finite-length cylinder with a free surface is studied. MethodsBased on the delay detached-eddy simulation (DDES) approach and piecewise linear interface calculation (PLIC) method, our in-house solver naoe-FOAM-SJTU is adopted to carry out numerical simulations. ResultsThe results show that the existence of the free surface and free end increases the lift and drag of local positions, and delays the occurrence of flow separation on the cylinder's surface. Compared with the deep draft region, the recovery of streamwise velocity near the free surface is delayed, and the transverse velocity tends to move outward. The deformation of the free surface generates many small vortices, and the twisted vortex at the free end restrains the development of the Kármán vortex street to a certain extent. ConclusionsThis study shows that the current numerical methods can accurately capture this complex flow field. At the same time, the existence of the free surface and free end significantly changes the distribution of the flow field in the draft direction.
Feb. 10, 2022Vol. 17 Issue 1 91 (2022)
Lei LYU, and Zuogang CHEN
ObjectiveTo address the problem of wave amplitude attenuation and phase shift with respect to propagation time and distance in numerical simulation, a set of parametric design methods that can stabilize wave generation in multiple periods is given. MethodsBased on Navier-Stokes equations and volume of fluid (VOF) method, a numerical simulation of fifth-order Stokes wave is carried out. Through the analysis of the discrete scheme of the one-dimensional wave equation, the influence of several important parameters on wave-generation effect is studied. Finally, the proposed parametric design method is used to carry out the three-dimensional numerical calculation of the resistance and motion response of the KRISO container ship (KCS) in head seas. ResultsThe results show that parameters such as inner iteration times, grid resolution, and Courant number can be accurately set according to certain rules to ensure that the error of wave amplitude is about 5% within 20 wave periods and about 10% within 40 wave periods. Through the three-dimensional numerical calculation of a KCS ship, the results obtained show an error of about 10% compared with the experimental results of model, Conclusionwhich verifies the feasibility of this method.
Feb. 10, 2022Vol. 17 Issue 1 99 (2022)
Yongqiang CHEN, Yu ZHANG, and Xiantao ZHANG
ObjectiveThe aim of this paper is to proposes new methods for modelling a very large floating structure (VLFS) with complex connections in the framework of the discrete-module-beam (DMB) hydroelasticity theory, and makes a comparison with the existing methods. MethodFirst, a brief introduction of the DMB-based hydroelasticity analysis method is given, followed by procedures for calculating the dynamic response of VLFS under regular waves. A structural stiffness matrix is then defined to model connections with complex forms in VLFS. Corrections are made to the relationship between the forces of two lumped masses and their displacements, obtaining a revised structural stiffness matrix and excitation force matrix, and solving the new hydroelastic equations. Finally, the varying trends of the structural dynamic response of VLFS against different bending stiffness by four methods are explored, and the corresponding reasons for their response differences are analyzed. ResultsThe results show that all four methods are capable of precisely predicting the hydroelastic response of VLFS with complex forms of interconnection. ConclusionThe methods in this paper extend the application of the DMB-based method in predicting the dynamic response of non-continuous VLFS, such as multi-hinged VLFS or VLFS with fracture places.
Feb. 10, 2022Vol. 17 Issue 1 117 (2022)
Sheng LI, Zhiqiang WANG, and Hong YIN
ObjectiveThis paper aims to study the influences of different allowable stresses of ribs in cylindrical shell design.MethodsTo this end, this paper uses full factorial experimental design and information entropy method to establish a multi-objective optimization model of ring-stiffened cylindrical shells based on the weighted-sum method, then uses the tolerance ranking method to optimize the solution of the model. Through changing the safety factor of allowable stress of ribs, the influences of them on the uniformity of the attributes of the cylindrical shell are analyzed. ResultsThe results show that the rib stress is the main constraint in design. When the safety factor of the allowable stress of ribs is 0.675, the margins of each attribute value are more uniform at about 15%, and the structural weight is relatively small at this time. ConclusionsTherefore, properly extending the allowable stress can solve the problem being the main constraint in structural design, and make the margins of each attribute value of the optimal solution more uniform.
Feb. 10, 2022Vol. 17 Issue 1 126 (2022)
Wenkai DONG, and Meixia CHEN
ObjectivesAn underwater anechoic coating layer laid on the hull surface of a submarine is squeezed under the action of high hydrostatic pressure, changing its shape and material parameters, which has a great impact on sound absorption performance. Therefore, studying the sound absorption performance of underwater anechoic coating layers under high hydrostatic pressure is of great significance for the stealth performance of submarines.MethodsConsidering the effects of cavity pressure on deformation and sound absorption performance of the annechoic coating layer under hydrostatic pressure, this paper uses axisymmetric finite element simulation to calculate the deformation of single cell with a cylindrical cavity, and the sound absorption coefficient curve is then obtained by converting the deformations into one-dimensional theoretical model. After that, structural-acoustic coupling analysis with the geometric model after deformation is carried out to verify the effectiveness of theorectical and numerical approaches for soloving the sound absorption coefficient.ResultsThe results indicate that, without considering the changes of material parameters, the unit cells of the layer shrink axially and the cavity shrinks radially under hydrostatic pressure, while the sound absorption curve moves towards high frequency. The air pressure inside the cavity resists contraction under the action of hydrostatic pressure, weakening the trend of moving to high frequency. The sharp valley in the sound absorption curve is caused by the excitation of cavity mode.ConclusionsThe results of this study can provide valuable references for predicting the sound absorption performance of an anechoic coating layer under hydrostatic pressure.
Feb. 10, 2022Vol. 17 Issue 1 132 (2022)
Gang JI, Xiaoliang SU, Haidong LI, Feng XU, and Mei TAN
ObjectiveThe purpose of this paper is to clarify the overall and local leakage rates of marine reactor safety vessel, establish the acceptance criteria of sealing test for reactor safety vessel and analyze the concentration of airborne radioactive material in surrounding cabins.MethodsBased on the sealing test standard of land-based nuclear power plants, a study on index allocation and calculation of leakage rate as well as feasibility analysis of floating nuclear power plants (FNPP) are carried out in accordance with the general procedure of "standard analysis-indices proposing-indices verification".ResultsThe results show that the proposed overall leakage rate of the reactor safety vessel of FNPP is about 3‰/24 h, and the leakage rate distribution of the penetrators of B & C types account for 10% and 50% of the overall leakage rate respectively under design basis accident conditions. During the sealing test, the overall leakage rate of the reactor safety vessel should be considered at 25% of the design margin.ConclusionThe calculated leakage rate of FNPP meet the requirements of the index and the design margin is desirable, which is of great reference value for the establishment of containment sealing test acceptance criteria.
Feb. 10, 2022Vol. 17 Issue 1 141 (2022)
Xuejian LI, Bin QIN, Yifeng XIAO, and Zekun FU
ObjectivesIn response to the increasing depth of research and design on liquefied natural gas (LNG) ship structures, higher requirements are put forward for a reliability analysis method that can quickly and accurately evaluate uncertain factors. This paper proposes a method based on an improved random forest-Monte Carlo method (RF-MC) to solve the calculation of the failure probability of A-type independent liquid tank support structures.MethodsFirst, the MC method is used to generate a sample set according to the probability distribution of uncertain factors, then take the local outlier factor (LOF) as the criterion for filtering out sample points near the failure surface. After selecting the sample points, they are calculated using finite element software and added to the training set to train the random forest (RF) model. The generation, filtering and training process is repeated until the approximate model meets the accuracy requirements. Finally, the approximate model is used to determine whether the sample points are invalid, then combined with the MC method to calculate the failure probability of the structure.ResultsConsidering the accuracy, complexity and efficiency of the algorithm, and combined with Cases 1 and 2, it is found that the improved RF-MC method has better advantages than MC or biased probability (BP)-MC in analyzing reliability problems. The results of Case 3 show applicability of the method in reliability analysis of an A-type independent liquid tank support structure.ConclusionsThis study provides a feasible technical solution for future optimization design of liquefied gas carriers.
Feb. 10, 2022Vol. 17 Issue 1 147 (2022)
Yifan YANG, Sangui CHEN, Weixing ZHOU, and Tao ZHANG
ObjectivesThis study analyzes the hydrodynamic loads of a typical cross-section structure of a high-speed M-boat during water entry.MethodsBased on the smooth particle dynamics (SPH) liquid-gas two-phase flow algorithm, simulations of both flat plate and arced structure water entry are carried out to verify the accuracy of the algorithm. On this basis, a typical cross-section structure water entry of the high-speed M-boat is simulated, and the results are compared with the experimental data available in literatures. ResultsThe simulation results of both flat plate and arced structure water entry are in good agreement with the experimental data. A second slamming phenomenon occurs during water entry of the high-speed M-boat, that is, a larger dead-rise angle of main hull would make the first slamming load smaller, but if the dead-rise angle is too large, the load on the structure during the second slamming will increase significantly.ConclusionsThe SPH two-phase flow algorithm can accurately simulate the water entry of a high-speed M-boat. It is suggested that the dead-rise angle of a high-speed M-boat should be designed appropriately.
Feb. 10, 2022Vol. 17 Issue 1 154 (2022)
Shuai CHEN, Ning WANG, Tingkai CHEN, Yi YANG, and Jiahe TIAN
ObjectivesIn order to solve the problem of the reduced accuracy of integrated navigation when a carrier is disturbed, a confidence check-adaptive federated Kalman filter (CC-AFKF) framework is proposed.MethodsFirst, the electronic compass (EC), global positioning system (GPS) and inertial navigation system (INS) are combined. Second, a confidence check model is constructed to effectively filter out low-confidence measurements in the INS/GPS and INS/EC subsystems, and ensure the accuracy of the measured value. Finally, an adaptive adjustment factor strategy for the INS/GPS and INS/EC systems is proposed to effectively adjust system noise covariance during the update process.ResultsA large number of related tests are carried out through an underwater vehicle equipped with INS/GPS/EC integrated navigation systems. The test results show that the CC-AFKF algorithm proposed in this paper can improve the integrated accuracy of position and velocity by at least 29% compared with typical KF and FKF algorithms.ConclusionsThe results of this study can provide corresponding directions and ideas for research on loosely coupled integrated navigation systems.
Feb. 10, 2022Vol. 17 Issue 1 203 (2022)
Rui ZHAO, and Jian XU
ObjectiveTo address the problem of underwater autonomous vehicles (AUVs) docking with parent vessels in recovery operations, a mobile platform-oriented AUV underwater guiding solution is proposed on the basis of multi-sources information fusion, including inertial, acoustic and optical signals. MethodsA federated extended Kalman filter integrating multi-sensors information is designed to improve filtering accuracy through decentralized filtering and information fusion. Motion equations are also established by combining the five AUV docking stages, in which the signals detected by the inertial navigation system (INS), acoustic ultra-short baseline (USBL) and optical guiding system are applied separately as inputs of sub-filters, resulting in a fusion guiding algorithm adapted to AUV underwater docking systems. ResultsSimulation experiments demonstrate that the guiding process based on multi-source information fusion is feasible and possesses robust performance and adequate control and steering accuracy. ConclusionsThe proposed fusion guiding solution meets the engineering requirements of underwater docking operations. The results of this study can provide technical references for the underwater docking of AUVs.
Feb. 10, 2022Vol. 17 Issue 1 212 (2022)
Weitong WANG, Jian YANG, Xiaoran GUO, and Lutao LIU
ObjectivesAs the detection-of-arrival (DOA) estimation algorithm used in traditional polarization sensitive arrays has such problems as high computation complexity and poor real-time performance, this study proposes a data compression-based orthogonal dipole polarization sensitive array structure. MethodsBy applying compression sensing technology to the system design (i.e., data compression technology), the proposed structure compresses the dimensions of the receiving signal vector, controls the complexity of the system by reducing the number of front-end chains, and brings high flexibility to the array structure design. At the same time, a dimensionality reduction-based multiple signal classification (MUSIC) algorithm is also proposed. First, the DOA estimation of signals is realized through spatial spectrum searching. The Lagrange multiplier method is then used to reduce the searching dimensionality, and the signal polarization parameters are obtained by solving the optimization problem.ResultsSimulation experiments show that the proposed array structure and MUSIC algorithm can correctly estimate DOA and polarization parameters when the incident signals are completely polarized and incoherent. When the signal-noise ratio (SNR) is greater than 10 dB, the root mean square error (RMSE) of the elevation angle is less than 0.05°. ConclusionsCompared with the non-compressed structure with an equal channel number under the same conditions, the proposed structure can provide higher estimation accuracy and lower computational complexity.
Feb. 10, 2022Vol. 17 Issue 1 221 (2022)
Ronghui YAN, Haicheng XIE, Minheng HUA, and Jianfeng YANG
ObjectiveThe aim of this paper is to proposes methods for better recognizing and positioning ships sailing in critical and wide-area waterways during monitoring operation.MethodsBased on video surveillance technology, the joint use of the motion and appearance features of ship target is carried out to realize a wide-area multi-dimensional recognition function via the combination of background subtraction based moving object detection algorithm and deep learning based target recognition algorithm. In addition, the improved approaches including water ripple noise reduction, hierarchical moving object detection and window segmentation of waterway monitoring image are put forward to further improve recognition accuracy.ResultsThe field demonstration results show that the improved methods proposed in this paper allow the accurate recognition of a ship of any type or size on the monitoring screen, and the use of conventional cameras can also achieve the recognition and position of a ship navigating a water area within a radius of 3 km. Conclusions The improved methods proposed in this study have a range of advantages including wide-area monitoring, complete coverage of ship types and sizes, automatic target recognition and robust anti-interference ability.
Feb. 10, 2022Vol. 17 Issue 1 227 (2022)
© Copyright 2018-2021 | Chinese Laser Press.
All Rights Reserved 沪ICP备15018463号-20