




 View fulltext
View fulltext

2023
Volume: 44 Issue 3
29 Article(s)

Zepeng CHEN, Wenyong LI, Zijian LAO, Yu CHEN, Jiaoyang LI, Jiahui WANG, and Min ZHENG
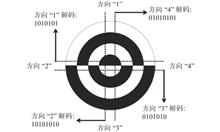
Visual positioning and navigation have a wide application prospect in logistics warehousing and other fields, but traditional monocular vision is difficult to achieve accurate positioning. Although binocular vision can achieve accurate positioning and navigation, the hardware cost is high and make vehicle to be bigger size. Therefore, a monocular positioning technology based on feature deformation was proposed. In this method, a single camera was used to record the distortion of features (ring patterns with encodings) laid on the ground with an embedded graphics processing unit (GPU) which analyzed the distortion, and achieved end-to-end monocular visual positioning. The embedded GPU recognized the encoded patterns of the feature ring through the deep-learning target detection algorithm for the images collected by the camera, and the deformation information of the pattern object through traditional image processing was obtained. The deformation information was input to a regression model trained by the extreme gradient boosting algorithm (XGBoost) to predict the coordinates of the camera relative to the center of the pattern. At the same time, combining the absolute coordinates of the feature ring, the indoor absolute coordinates of the camera were finally calculated. The experimental results show that the average positioning error in the range of 2 m×2 m is only 0.55 cm, which is one order of magnitude better than that reported in the literature. The algorithm has a real-time performance with a positioning solution frame rate of 20 frames on the computer and 4 frames on the embedded GPU.
May. 15, 2023Vol. 44 Issue 3 469 (2023)
Changtian SI, Lei YANG, Chengxiang GUO, Tianyi SHI, and Hongbo XIE
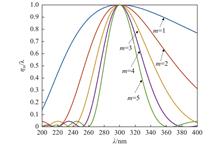
Ultraviolet (UV) image intensifiers are widely used in corona detection, strategic national defense, scientific research and other fields. However, due to the lack of available materials for the UV optical lens and the difficulty of chromatic aberration correction, it is difficult to meet the needs of wide spectrum applications. The applicability of single-layer diffractive optical element (DOE) and double-layer diffractive optical element in broadband UV optical system was analyzed. A set of UV optical system with the wide spectrum and the high resolution were designed respectively. The working wavelength range of the single-layer diffractive UV optical system is 230 nm~280 nm, and the modulation transfer function (MTF) value at the cut-off frequency of 60 lp·mm?1is better than 0.47. The working wavelength range of the double-layer diffractive UV optical system is 200 nm~400 nm, and the MTF value at the cut-off frequency of 60 lp·mm?1is better than 0.49. The design results show that the DOE can effectively correct the chromatic aberration of the UV spectrum. Compared with the existing wide spectrum UV system, the designed optical systems are relay imaging systems with wider UV spectral range and higher imaging resolution.
May. 15, 2023Vol. 44 Issue 3 476 (2023)
Xiaomeng WANG, Yu CHEN, Chunyan WANG, Yiwu ZHAO, Hao SUN, Huan LIU, and Tong ZHANG
An optical system for panoramic surveillance cameras that can achieve clear all-weather imaging was designed. A panoramic annular structure was adopted, which was divided into two parts: camera head unit and relay lens unit. The camera head unit completed the full field of view target search, and the relay lens unit performed secondary imaging of the intermediate virtual image formed by the head unit and converged it on the detector. The design adopted multiple structural optimization methods to achieve visible light and near-infrared dual band imaging. The field of view of the optical system is 360°× (40°~100°), the focal length is ?2.75 mm, and the Fnumber is 3.28. The design results show that the modulation transfer function (MTF) value is close to the diffraction limit at the full field of view, the diffuse spot radius of each field of view is less than the selected CCD pixel size, the distortion is less than 2%, and the day-night defocus amount is less than 0.002 mm, which can meet the requirements of all-weather and panoramic surveillance.
May. 15, 2023Vol. 44 Issue 3 484 (2023)
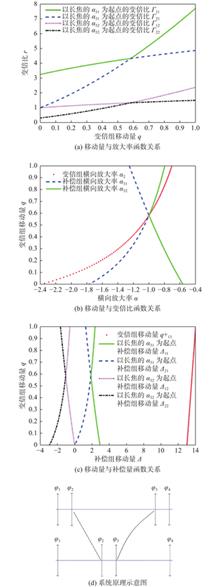
Yuting WU, Zhiqiang LIN, and Min WANG
The zoom optical system is not only suitable for daily life such as photography, surveillance and microscopy, but also widely used in aerospace and national defense construction. With the expansion of the application range, there are more and more requirements for its performance indicators. A 15 mm~300 mm wide-spectrum four-component continuous zoom optical system was designed, which used a positive group compensation structure to achieve 20 times optical zoom, operating in the spectrum range of 450 nm~900 nm, and the working temperature range was ?40 ℃~ 60 ℃. It also used 18 pieces of spherical glass lenses with a total length of 160 mm, a maximum aperture of 66 mm, and a long focal Fnumber better than 5, which showed the system had compact structure and met the miniaturization requirements. In the visible light band, the modulation transfer function (MTF) of the central field of view was greater than 0.4@145 lp/mm, and the MTF of full field of view was greater than 0.2@145 lp/mm. In the near infrared band, the MTF of the central field of view was greater than 0.45@60 lp/mm and the MTF of full field of view was greater than 0.2@60 lp/mm. From the design results, the proposed design meets the requirements of high performance index, and has certain reference significance for the design of zoom optical system with wide spectrum, large zoom ratio and miniaturization.
May. 15, 2023Vol. 44 Issue 3 491 (2023)
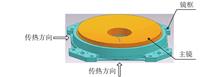
Xiaozhou ZUO, Huilin WANG, Yun ZHOU, Gangyang XI, Yunlong ZHANG, Hongjun ZHAO, and Bingwei YU
Aiming at the adaptability problem of common optical path system to ambient temperature, a regional thermal control method of primary mirror assembly based on comprehensive heat transfer was proposed on the basis of the temperature-optics deformation characteristics. The heat transfer model of the primary mirror assembly was established, and the temperature distribution properties under typical conditions were analyzed. The thermal simulation of the primary mirror with different materials was carried out, and the model was modified with the thermal optical test results, so that the absolute deviation between the simulation and the measured results of the temperature field was less than 1.4 ℃. At the same time, the temperature gradient control threshold of the primary mirror assembly was determined. On this basis, the regional heat transfer strategy was adopted to make the primary mirror assembly reach the thermal control goal of high temperature rise level and low temperature gradient. Taking a primary mirror assembly as the object, the simulation and test were carried out. The results show that when the average temperature rise of the primary mirror reaches more than 16 ℃, the axial temperature gradient of the mirror is equal or lesser than 2.5 ℃, the radial and circumferential temperature gradient is equal or lesser than 2.4 ℃, and the variation of the primary mirror shape is less than 0.005 λ, which can provide an optimization idea for the overall thermal control design of the common optical path system.
May. 15, 2023Vol. 44 Issue 3 500 (2023)
Zhengjie LIU, Peng XUE, Yuanyuan CHEN, Yanlin LIU, Dayang XIE, and Rui ZHANG
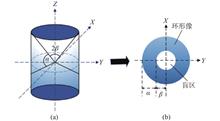
Aiming at the problems that the variable angle mechanism of generalized ellipsometer is mostly driven by dual motors, and has complex structure as well as deviation of optical path after angle variation, a new variable angle mechanism of generalized ellipsometer driven by single motor was proposed. A fixed polarization generation arm was adopted by the structure, which was driven by a single motor geared by the synchronous gear to rotate the loading platform and the polarization detection arm synchronously, so as to realize the multi-angle measurement of the ellipsometer. On the basis of the traditional horizontal variable angle mechanism of the generalized ellipsometer, the 1 : 2 synchronous transmission of loading platform and polarization detection arm was set up, and the feasibility of the structure was verified by Inventor motion simulation. The proposed single motor driven variable angle mechanism not only maintained the collimation before and after the angle variation, but also had a simple overall structure, which greatly optimized the complexity of the ellipsometer angle variation, and had an important application value in the engineering process of the generalized ellipsometer.
May. 15, 2023Vol. 44 Issue 3 507 (2023)

Na XIE, Yanlu DU, Shizhou JIANG, Quancheng GONG, Mingchao WANG, Feifei XU, Xinwei WANG, and Yuan QI
To effectively guide the design of fast steering mirror (FSM), the research of theoretical modeling and simulation analysis for FSM was carried out. Compared with the single degree of freedom motion model, the multiple degrees of freedom motion differential equation of a two-axis FSM was built based on the dynamics analysis, and the transfer function of the controlled object as well as isolation transfer function to the base disturbance were derived. The influence of structure resonance frequency on the characteristics of the controlled object was simulated. When the rotation natural frequency was high, the controlled object was an under-damped system which had resonance peaks. The simulation model was built for the FSM control system with the structural characteristics. The influences of the load centroid deviation from the flexible hinge support center and the structural resonance frequency on the disturbance rejection performance were researched. The disturbance rejection performance would be better when the natural frequency of non-working shaft was higher. Generally, the frequency at the gain junction of the servo system is more than 2 times, and the natural frequency of the working shaft should be selected by weighing the disturbance rejection performance and motor torque constraints. Finally, the correctness of the simulation model was verified via the physical vibration experiments.
May. 15, 2023Vol. 44 Issue 3 513 (2023)
Yaxiong OUYANG, Ruihui PENG, Jianjun SHA, Lin ZHANG, and Kaiyi ZHANG
Camouflage effect evaluation is an important content in the development of camouflage technology. In order to make full use of spectral details to evaluate the hyperspectral camouflage effect of targets, a camouflage effect evaluation method based on spectral indices was proposed, which had the advantages of visualization and quantitative analysis. In terms of visualization, the hyperspectral image was segmented by spectral indices to realize the camouflage effect evaluation of visual interpretation. In terms of quantitative analysis, based on the existing remote sensing spectral indexes, the new camouflage spectral indexes were constructed to quantify the spectral characteristics of the target and background, and the spectral consistency coefficient index was proposed to weight and synthesize the spectral indexes, so as to quantitatively evaluate the camouflage effect of the target. The experimental results show that the proposed method can effectively identify the hyperspectral camouflage effect before and after target camouflage, and when the similarity of traditional indices reaches more than 99%, this method can still effectively identify the target and give an objective evaluation. Its evaluation results are more accurate, comprehensive, scientific and reasonable in terms of the consistency of single spectral segment and the overall matching of wide spectral segment.
May. 15, 2023Vol. 44 Issue 3 523 (2023)
Xianhao QI, Sen HAN, Linghua ZHANG, Xianyu WU, Jun CHENG, and Xiaoyue BIAN
A scheme for coherent noise suppression by an off-axis illumination system was proposed, and an illumination system with the ability to suppress coherent noise was designed. The illumination system was simulated by the non-sequential mode of Zemax to obtain an off-axis annular light spot with a thickness of 90 μm. To verify the ability of this illumination system to suppress coherent noise, it was used as the light source of a 19.05 mm (3/4 inch) Fizeau interferometer. A comparative experiment was carried out with a light source wavelength of 632 nm, and scratches were set with the circular noise spots size of 120 μm~500 μm and the size of 100 μm×350 μm. Error analysis of this illumination system was performed to optimize the imaging quality of the illumination system and adjust the parameters of the interferometric system. Finally, the contrast of the interference fringe was improved to 97.60% with illumination ring thickness of 42 μm and interference cavity length of 15 mm.
May. 15, 2023Vol. 44 Issue 3 533 (2023)
Zheng ZHANG, Qinjian QIAN, Jiazheng ZHOU, Zipeng KE, and Xinyu HU
Crack detection is a key engineering task. Aiming at the problems of large number of parameters, large amount of calculation and weak real-time performance of the existing mainstream crack semantic segmentation models, an improved real-time segmentation algorithm of crack images based on fast segmentation convolution neural network (Fast-SCNN) was proposed. First, the spatial pyramid pooling (SPP) module with disadvantages of loss of pixel position information and large amount of calculation was optimized on the basis of Fast-SCNN. Then, the up-sampling method was improved to fully consider the relationship between pixels, and a lightweight positional self-attention module was proposed for up-sampling to improve the detection accuracy. Finally, the respective outputs of the dual branches highlight the crack-related regions and suppress the irrelevant backgrounds through the attention gates. The proposed algorithm can provide a more accurate pixel-level attention for the model, and can more effectively identify small cracks as well as improve the robustness of crack segmentation in complex backgrounds. Experiments show that, compared with the existing mainstream models and other lightweight models, the proposed algorithm further balances the segmentation accuracy and detection speed, and achieves an average intersection ratio of 80.31% and an F1 score of 76.74% on the crack dataset. The parameter amount is 1.20 M, the calculation amount is less than 1 G, and the inference speed reaches 151 f/s, which has high application value for the real-time segmentation and detection task of crack images.
May. 15, 2023Vol. 44 Issue 3 539 (2023)
Jian'an LIANG, Bin LIU, Meiyan LIANG, and Yafei GUO
Aiming at the problem that the target is difficult to identify under complex background conditions, the color polarization imaging technology was adopted to propose a target enhancement method based on the color polarization image. Firstly, the degree of linear polarization (DoLP), angle of polarization (AoP) and color intensity (S0) images were obtained according to the data from the split-focal plane color polarization camera. Then, the visual salience of DoLP, AoP and S0was extracted by using the large difference of color polarization characteristics between targets and backgrounds, so that the targets were initially enhanced. Moreover, the three visual salience images were transferred to HSV space for fusion, and finally transferred to RGB space for display. Experiments were conducted by using contrast and vector angle distance as the objective evaluation indexes. The multiple experimental scene data show that the contrast and vector angular distance of the fused images are 3.971 times and 1.711 times higher than those of the images before fusion, respectively.
May. 15, 2023Vol. 44 Issue 3 548 (2023)
Liang SONG, Yuhai GU, and Wentian SHI
Unstructured roads usually have no clear boundaries and lane lines, and the environment is more complex. The traditional segmentation methods based on road texture and color features cannot meet the requirements of real-time performance and accuracy. For unstructured road scenes, a lightweight semantic segmentation model based on improved BiSeNet was proposed, which adopted the lightweight trunk extraction network and introduced the depthwise separable convolution to optimize the speed control. The channel attention was introduced in the final feature fusion stage to adaptively select important features, suppress redundant information, and improve the accuracy of unstructured road segmentation. The number of parameters of the improved model is only 1.11×106, the detection speed is increased by 18.83%, and the F1-score reaches 96.74%. Compared with other mainstream semantic segmentation models, the proposed algorithm has the advantages of small parameters, high speed and high accuracy, which can provide a reference for the safe operation of unmanned vehicles in unstructured road scenarios.
May. 15, 2023Vol. 44 Issue 3 556 (2023)
Zikang ZHANG, Songfeng YIN, Liangcai CAO, and Cheng LIU
Removing age-related features from face features to obtain pure identity features is an important means to achieve cross-age face recognition. However, the mainstream identity feature extraction methods ignore the processing of identity-age sharing features, resulting in incomplete extracted identity features. To this end, a new method of introducing identity-age sharing features was proposed, decoupling mixed face features into pure age-related features, pure identity-related features and identity-age sharing features, and then multi-dimensional coupling of pure identity-related features and identity-age sharing features to obtain complete identity features and effectively improving the accuracy of cross-age face recognition. The proposed method achieved a recognition accuracy of 97.07% on the face aging benchmark dataset Age-DB30 and 99.73% on the LFW dataset, demonstrating the effectiveness and advancedness of the proposed method.
May. 15, 2023Vol. 44 Issue 3 565 (2023)
Hai LI, Chenhao ZHENG, Pingwei ZHAO, Jinping NI, and Zhichao WU
Using the traditional zone-block apparatus for the projectile velocity test, the air resistance is always ignored and the projectile is assumed to be moving in a straight line at a uniform speed. Based on the principles of aerodynamics and theoretical mechanics, a method for measuring the instantaneous velocity of projectiles using two sets of zone-block velocity measuring apparatus was proposed. The velocity attenuation coefficient Bof the projectile flying in the test area was calculated by using the velocity values of two velocity measuring points separated from a certain distance. Then the instantaneous velocity of any point in the trajectory near the test area could be calculated from the Bvalue. Simulation analyses show that the relative measurement error of this method within 0.8 times the speed of sound is less than 0.01%, which is much lower than the engineering error requirement of 0.1%. The slingshot, air gun and rifle live ammunition experiments find that the measurement accuracy of the projectile flight speed within 0.8 times or more than 1.2 times the speed of sound is not lower than the 0.1% accuracy of the zone-block apparatus, which verifies the feasibility of this method. The research provides new ideas and methods for the design and optimization of the ballistic comprehensive parameter measurement system.
May. 15, 2023Vol. 44 Issue 3 571 (2023)
Liang YUAN, Lin'guang YUAN, Zaitian DONG, Yan LI, Jihong FAN, Fei LU, Juncheng ZHAO, Deng ZHANG, and Yue YOU
In order to meet the high-precision measurement requirements of spectral emissivity of high-temperature material coating, including stealthy materials, thermal protection materials, heat insulating coat and so on, the measuring methods for normal spectral emissivity of materials at 1 273 K~3 100 K was explored. A measurement model of normal spectral emissivity of materials was established based on the emissivity definition. On this basis, the measurement facility of normal spectral emissivity of materials was built, and the wavelength range was 0.7 μm to 12 μm. In order to overcome the technical difficulties associated with cavity effect when the sample was heated with high precision in the measuring device, a sample heating furnace with a movable graphite crucible was developed, and the good experimental results were obtained. The normal spectral emissivity of two samples (SiC and low emissivity coating) was measured by this facility. The results show that the normal spectral emissivity of two samples reduces with the increase of wavelengths and rises with the increase of temperature. Finally, the measurement uncertainty of normal spectral emissivity of materials at high temperature was analyzed, and the relative expanded uncertainty is 3.6%.
May. 15, 2023Vol. 44 Issue 3 580 (2023)
Yanqin LI, Zhaocan GUO, and Dehai ZHANG
In view of the problems existing in the traditional strain detection methods, such as complex operation process, inability to realize real-time measurement and great influence by the environment, the digital image correlation (DIC) method was used to measure the strain values of copper/aluminum clad plate and its components during the tensile process, and the measured results were compared with those obtained by the stretching machine and the finite element simulation measurement. The results show that the strain curves of Cu plate, Al plate and Cu/Al clad plate obtained by DIC method and tensile test are very similar. The principal strain measured by DIC method has a high consistency with that simulated by finite element method, and the surface strain distribution is basically the same as the maximum principal strain, with a maximum difference of 0.442 % and a minimum of 0.008 %. The strain differences obtained by finite element simulation has a large variation with the maximum variation of 4.950 %, while that obtained by DIC method has a small variation with the maximum variation of 0.693 %. On this basis, the precision of DIC method and finite element method was studied by introducing strain differences, which verified the feasibility and superiority of the DIC method for the tensile strain detection of Cu/Al clad plate.
May. 15, 2023Vol. 44 Issue 3 586 (2023)
Dongdong ZHANG, Chunping WANG, and Qiang FU
In near-shore scenes, under the influence of background, the probability of false detection and low detection accuracy of ship critical parts are high. To address the above problems, a detection network of ship critical parts based on semantic features was proposed, which named critical part detection network (CPDNet). Firstly, by optimizing the network structure and introducing the attention mechanism, the feature expression ability and the perception ability of the ship critical parts were improved. Secondly, based on semantic information, a semantic mask module was designed to reduce the impact of background on detection accuracy. In addition, the angle parameter was added to make the network applicable to targets with orientation. Finally, a ship critical parts dataset, named CP-Ship, was constructed to verify the effectiveness of the proposed network. The experimental results on the CP-Ship dataset show that the average accuracy of the proposed network is 11.35% higher than that of RetinaNet. Compared with other network models, the proposed network performs well in both detection accuracy and speed.
May. 15, 2023Vol. 44 Issue 3 595 (2023)
Tianshu LAI, Huaiguang LIU, Bo TANG, and Shiyang ZHOU
The existence of defects in solar cells due to the process or material reasons in the production process. Based on the photoluminescence imaging principle, an image enhancement method for solar cells based on background assessment and a defect recognition method based on morphological feature and HOG feature fusion were proposed. Firstly, the characteristics of shape and location of cell defects were analyzed, and the two-step segmentation method was proposed to extract multi-directional HOG features from the segmented defects, and Laplace feature mapping method was adopted to reduce the dimension of HOG features. Then, the morphological characteristics such as aspect ratio and circularity were fused. Finally, according to the kernel function and penalty factor in support vector machines (SVM), the particle swarm optimization (PSO) algorithm was optimized to improve the defect classification effect. Fifty images were detected by using the proposed method, and the accuracy of classification recognition reached 98.3%. Comparing the proposed algorithm with the traditional SVM algorithm and Le-Net network, it can be seen that the proposed algorithm has the higher recognition accuracy.
May. 15, 2023Vol. 44 Issue 3 605 (2023)
Yunshuo QIN, Yongjian ZHU, Guofeng QIN, and Dong WANG
In the process of measuring the topography of objects by the phase-shift method, the mass-guided method plays an important role in the phase unwrapping. In the detection of surface defects of high-reflective object, the phase-shift fringe modulation is often used to identify surface defects. A new defect characterization mass map was proposed by combining Sobel gradients with fringe modulation, namely modulation-sobel gradient variance (MSGV) mass map. The root-mean-square error, peak signal-to-noise ratio, and signal-to-noise ratio of the unwrapped phase map and the original phase map were compared to simulate and test the phase unwrapped data. The results show that the average peak signal-to-noise ratio of MSGV is improved by about 1.97% compared to the modulation-phase gradient variance (MPGV) mass map, and the root-mean-square error is reduced by about 2.91%, which indicates that the proposed MSGV algorithm has certain advantages compared with the traditional algorithms, with higher noise immunity and lower unwrapping error. The proposed method was used to detect and locate the defects on the surface of the drum roller. The results show that the MSGV can better display the contour information of defects.
May. 15, 2023Vol. 44 Issue 3 614 (2023)
Liequan WU, Zhifeng ZHOU, Zhiling ZHU, Wei ZHANG, and Yong WANG
Aiming at low efficiency of traditional visual detection method and shallow model as well as low semantic character of target detection algorithm based on manual features, an surface defect detection method of patch diode based on improved YOLO-V4 was proposed. Firstly, DenseNet was used in CSP1 module to replace ResNet in original network, considering that gradient disappeared with network deepening and feature redundancy as well as parameters were reduced. Then, to realize cross-dimensional interaction of feature information and make the network pay more attention to important information, the three-branch attention mechanism module was introduced after CSP1 module, and features were fused with FPN+PANet. CBL×5 module was replaced by CSP2, which reduced computation of network and improved detection speed of algorithm. Finally, the Focal Loss function was optimized and weight was added to positive and negative samples to solve the imbalance problems. The detection precision (P), recall ratio (R) and mean average precision (mAP) of the algorithm are 2.98%, 2.65% and 2.92% higher than that of YOLO-V4, respectively, which shows that the improved YOLO-V4 can effectively detect the surface defects of patch diode.
May. 15, 2023Vol. 44 Issue 3 621 (2023)
Chaolong HU, Lei LIU, Yunsheng QIAN, Yongchao MO, Xiaofeng BAI, and Feng SHI
Spectral matching factor is an important parameter for the performance evaluation of the low-light-level (LLL) night vision system. However, the traditional spectral matching factor can only reflect the degree of coincidence between the spectrum of the photocathode and the target in the response wavelength range, and cannot distinguish the performance of different generations of photocathode in LLL night vision system. Therefore, an evaluation factor equation was established to describe the effect of the photocathode on the detected scene, combined with the initial contrast, the integrated sensitivity and the spectral conversion coefficient. Meanwhile, the initial contrast formula of the target and the background was improved to increase the accuracy of the initial contrast. The spectral matching factors and the proposed evaluation factors of a super-second generation photocathode material and a third generation photocathode material which named New S25and GaAs with different targets were calculated. The spectral matching factor between New S25and the target was greater than that between GaAs and the target, which proved the limitation of the spectral matching factor. The evaluation factor between GaAs and the target was greater than that between New S25and the target, which proved that the proposed evaluation factor could evaluate the performance of LLL night vision system more effectively.
May. 15, 2023Vol. 44 Issue 3 628 (2023)
Yong ZHANG, Weiping LIU, Sasa MA, Zhiwei LI, and Bin ZHOU
Low-illumination night vision equipment based on complementary metal-oxide-semiconductor (CMOS) devices has good concealment and lower cost than infrared thermal imaging equipment. It is an important means to expand human visual perception under low illumination conditions and widely used in military and civil fields. In order to meet the requirements of equipment maintenance and support under low illumination condition at night, an optical system of night vision goggle with large field of view and low illumination was designed. By selecting the appropriate optical glass material, it had a good spectral response in both visible and near infrared bands. The designed eyepiece with large relative aperture had a field of view angle of 74.46°, focal length of 46 mm, Fnumber of 1.2, distortion less than ?7.14%, total length of the system less than 80 mm and lens weight less than 100 g. Under the spectral range of 486 nm~950 nm, the eyepiece can meet the maintenance, training and scene observation without lighting at night, which provides a new technical means for the development of optical module of low-illumination night vision head-mounted system.
May. 15, 2023Vol. 44 Issue 3 636 (2023)
Ziyuan LI, and Weiqi JIN
Compared with the traditional imaging systems, the polarization imaging systems are capable of improving the detection and recognition ability of the target by detecting the obvious polarization differences of the target in different states. Therefore, they have been widely used in complex environments or target detection with camouflage. In particular, the information detection in the short-wavelength infrared spectrum range can provide high resolution and details that cannot be seen by the human eyes, which is one of the key research directions in the military and civilian applications. First, the structural classification and characteristics of traditional polarization imaging systems were summarized. Then, the recent research progress of new micro-nano polarization imaging systems was discussed. Finally, the feasibility analysis and suggestions for the main problems of the current short-wavelength infrared polarization imaging technologies were provided.
May. 15, 2023Vol. 44 Issue 3 643 (2023)
Yuxin YANG, Xuexin WANG, Xu ZHANG, Bing YU, Siwei LI, Yi XIE, and Xiaoyu YAN
As the key index of stealth performance of aircraft skin, the emissivity is an important means to evaluate the comprehensive stealth performance of the aircraft. The spectral emissivity measurement method of infrared stealth coatings was introduced, and the corresponding calibration device at ambient temperature was established. A Fourier transform spectrometer based on Michelson interference theory was designed to realized the spectral splitting. The sample chamber with gold-plated integrating sphere was used to realize the vertical incidence and diffuse receiving of the signal, and the accurate measurement for spectral emissivity of stealthy coating was realized. A traceability method using diffuse reflection films as the reference standard was proposed, which realized the traceability of calibration device. Finally, the spectral emissivity of brass and other samples was measured by using the proposed calibration device, and the measurement results with a spectral range of 3 μm~12 μm were obtained. The measurement uncertainty of spectral emissivity is better than 3.2% (k=2).
May. 15, 2023Vol. 44 Issue 3 655 (2023)
Gangyang XI, Bo ZHANG, Xiaozhou ZUO, Zhongqiang WANG, Xin LIU, and Hongjun ZHAO
The comprehensive detector of the photoelectric system outside the box is an important accessory of the high and low temperature performance test device of the photoelectric imaging system, and the multispectral optical window is an interface between the high and low temperature box and the external target simulator. According to the application requirements and material analysis results, the multispectral ZnS was selected as the optical window material. Through the heat conduction theory, the low-temperature service state of the optical window assembly was analyzed, focusing on the influence of the window assembly heating under the low-temperature condition on the surface shape of the window assembly, and the structural form to realize the micro-stress assembly and the design scheme to solve the frost and fog of the window assembly under the low-temperature condition were put forward. According to the extraction, processing and data fitting of finite element calculation results by sigfit and the analysis of caliber by CODE V, the root-mean-square (RMS) value of wave aberration of Φ310 mm window assembly in the temperature range is better than λ/15. The above contents all meet the optical performance requirements of window assembly. And finally, it was verified through the physical prototype. The experimental results show that the structural design scheme of multispectral optical window assembly not only meets the requirements of multi band usage, but also meets the requirements of low-temperature defrosting and defogging, and ensures the optical performance requirements under high and low temperature conditions.
May. 15, 2023Vol. 44 Issue 3 661 (2023)
Jingwei YANG, Yunsheng QIAN, Lei LIU, and Jie LU
Electron bombarded active pixel sensor (EBAPS) has the advantages of high gain, fast response, low power consumption and low cost. Research on EBAPS has become an important development direction of low-light-level night vision imaging technology. In the circuit design of relevant domestic institutions, the chips involved in the EBAPS imaging circuit mainly rely on imports. In order to accelerate the localization process of imaging circuits of EBAPS devices, a set of domestic-produced imaging circuit evaluation board based on EBAPS was developed. The circuit used the FPGA chip of domestic Fudan Micro FMK50t series as the main control chip, and completed the functions of driving the EBAPS device, digital image processing and real-time display by designing a complementary metal oxide semiconductor (CMOS) driver module, a data processing module, and a Cameralink display module. The experimental results show that when the bombardment negative high voltage is 1 500 V, the minimum detection illuminance of the domestic EBAPS camera can reach the order of 10?3lx.
May. 15, 2023Vol. 44 Issue 3 668 (2023)
Jinyao HOU, Weiguo LIU, Shun ZHOU, Aihua GAO, Shaobo GE, and Xiangguo XIAO
The surface defects of optical elements, namely surface defects, will directly affect the performance of the optical system. In the classification of surface defects, the shapes of many surface defects are irregular, so it is difficult to achieve the expected effect by relying on normal pattern recognition technology. To overcome the low precision and long time consuming in classification of surface defects of precision optical elements, a classification method of surface defects based on convolutional neural network was proposed. Firstly, the surface defect image was obtained by scattering method to analyze its imaging characteristics, and the training ability of the network was strengthened by rotating the image and mirroring the amplified dataset. Furthermore, the AC training network model was used to strengthen the feature acquisition ability of the network without increasing the extra calculation. Finally, the Softmax classifier was used to classify the surface defects into scratch, pitting and noise. The experimental results show that the defect classification accuracy of the used model is more than 99.05%.
May. 15, 2023Vol. 44 Issue 3 677 (2023)
Ya'ni ZHANG, Kexin WU, Ting MIAO, Jia XUE, and Yiming YAO
A soliton mode-locked erbium-doped fiber laser (EDFL) was reported using copper oxide (CuO) material as a saturable absorber (SA). The CuO material was prepared by liquid phase precipitation method and deposited on the tapered fiber as a passive mode-locked device. When the pump power was 233.6 mW, the traditional soliton pulses with a pulse width of 1.23 ps were obtained at the central wavelength of 1 530.2 nm, with a basic repetition frequency of 5.34 MHz and the pulse energy as well as average output power of 1.37 nJ and 2.2 mW, respectively. In addition, when the pump power was increased to 329 mW, the bound-state soliton pulses were first observed at the central wavelength of 1 529.6 nm, with a spectral modulation period of 3 nm and a pulse separation of 2.6 ps. The results show that the CuO materials are good SA candidates for ultrafast fiber lasers.
May. 15, 2023Vol. 44 Issue 3 684 (2023)
Jintao XU, and Ailing TIAN
For the output ripple phenomenon caused by sampling frequency jitter of digital closed-loop fiber optic gyroscope control system, based on the discrete control system theory, the theoretical model of digital closed-loop fiber optic gyroscope under four-state square wave modulation was established. The stability conditions, steady-state errors and frequency response characteristics of the control system were studied, and the ripple free minimum beat control scheme of digital closed-loop fiber optic gyroscope was proposed. Through comparison with the original control system by experiments, the results show that the ripple free minimum beat control effectively eliminates the output ripple caused by sampling frequency jitter in the digital closed-loop fiber optic gyroscope control system, effectively improves the accuracy of the digital closed-loop fiber optic gyroscope, and the bias stability is improved by about 30%.
May. 15, 2023Vol. 44 Issue 3 693 (2023)
© Copyright 2018-2021 | Chinese Laser Press.
All Rights Reserved 沪ICP备15018463号-20