





 View fulltext
View fulltext

2024
Volume: 41 Issue 6
15 Article(s)
Qing LYU, Jinglong MENG, Shiyao LI, Yi ZHANG, and Heshuai LIU
With the development of aerospace technology,space has become a strategic focus,and the perception of spatial targets is particularly crucial,including the detection of satellite electromagnetic spectra and individual satellite identification.Telemetry signals are common radiation source signals for satellites in orbit,and individual satellite targets can be effectively identified by in-depth analyses on the potential features in their telemetry signals.In this paper,an identification method based on multi-modal fusion is proposed.It combines residual convolutional networks and long short-term memory (LSTM) networks,and can enhance the network's ability to extract and fuse deep features of signal data,significantly improving the identification accuracy.Experimental tests show that the proposed method achieves an average identification accuracy of 92% on the actual data set.This study has guiding significance for the development of satellite individual identification technology,and is expected to promote further research and application in this field.
Dec. 25, 2024Vol. 41 Issue 6 14 (2024)
Xuefeng TAO, Shuailong ZHAO, and Zhi LI
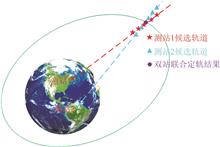
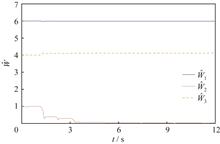
Due to the lack of range information constraints,the orbit-determination results of single-station goniometric data in short-arc segments have great uncertainties.A joint orbit-determination algorithm that can directly use the observation data from multiple stations is proposed for the problem of multi-station joint orbit-determination under extremely short-arc conditions.The algorithm does not require the time synchronisation of the joint measurements,and the measurement data with different accuracy can be weighted.At the same time,the corresponding uncertainty estimation method is proposed,and the unscented transformation (UT) is used to calculate the orbit-determination covariance,by which the probability of the orbit-determination results can be described.Simulation experiments are carried out with two-station optical measurements as an example.The results show that the joint two-station orbit-determination can achieve high orbit-determination accuracy when the observation arc segment is less than 0.1% of the orbit period.The semi-long-axis accuracy of GEO and HEO satellites is in the order of kilometers,and that of LEO satellites is in the order of 100 meters.
Dec. 25, 2024Vol. 41 Issue 6 23 (2024)
Qing LI, Shiyuan ZHANG, Shan LU, Yongjiang XIA, and Licheng LIU
In order to estimate the long-distance relative state of space non-cooperative spacecraft,a nonlinear relative motion model for the long-distance tracking of non-cooperative space spacecraft is established.The linear and nonlinear states are separated and discretized,by which the discretization accuracy is improved while the local nonlinear characteristics of the model are preserved.In view of the features that the state equation of this model is only partially nonlinear and the linear and nonlinear parts are decoupled from each other while interacting with each other,a local nonlinear Kalman filter (LNKF) is proposed based on matrix partitioning,and a simplified setting method of quadrature points without information loss is designed.This filter combines both linear and nonlinear operations,which reduces the computational complexity of the algorithm on the basis of avoiding the loss of state information.The proposed algorithm is applied to the long-distance relative state estimation for non-cooperative spacecraft,and the simulation results show that the calculation efficiency of the LNKF is significantly higher than that of the extended Kalman filter (EKF) and cubature Kalman filter (CKF) on the premise of ensuring the calculation accuracy.
Dec. 25, 2024Vol. 41 Issue 6 31 (2024)

Chenyu ZHAO, Biao XU, Xun SONG, Qilun ZHAO, and Shuang LI
In order to solve the problem that it is difficult to conduct dynamic modeling for cross-domain interceptors flying in wide-speed and large-space domains and there are no relevant models,a data-driven online reinforcement learning attitude control method is proposed.First,inspired by the zero-sum game,the interference is considered as a part of the system input to design the performance index function.The purpose of the actual interceptor control quantity input is to minimize the performance index function and improve the system performance,while the effect of interference is opposite.Then,the corresponding approximate solution is obtained through online learning by constructing a critic network,and the uncertainty is handled by updating the weights dynamically.Different from the traditional model-based online reinforcement learning solution method,the data-driven reinforcement learning (RL data driven)method no longer requires the dynamic model information of the interceptor system,but only uses the input and output data of the system to drive the network online learning and updating of weights.Finally,the effectiveness of the proposed method is verified by simulation.
Dec. 25, 2024Vol. 41 Issue 6 39 (2024)
Kin Thong LEE, and Zhaokui WANG
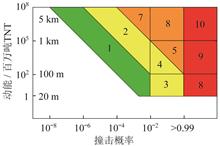
In an asteroid momentum deflection mission, the existence of ejecta effects induces an apparent “amplification” of the system momentum. Existing studies predominantly focus on scenarios where a spacecraft impacts an asteroid’s geometric center. However, through theoretical derivations, this paper demonstrates that when the velocity vector of the spacecraft is non-parallel to that of the asteroid, an impact offset from the geometric center can result in a significantly greater deflection distance compared with a geometric center impact. Numerical simulations are conducted for a potentially hazardous asteroid, i.e., Apophis, to evaluate the kinetic impact deflection by comparing the deflection distances resulting from the impacts at a geometric center and a non-geometric center under an optimized dual-pulse transfer orbit. The results reveal an average deflection distance of 923.59 km with a standard deviation of 273.29 km for geometric center impacts, whereas the impacts on a specific non-geometric surface yield an average deflection distance of 1 328.57 km and a standard deviation of 48.61 km. This translates to a 43.85% increase in the deflection distance and approximately a 5.6-fold reduction in the standard deviation, substantiating the method’s effectiveness. Addressing the lack of asteroid attitude information, this study employs a Monte Carlo method to generate 100 000 random attitude samples for the simulation to manage uncertainties. The findings confirm the theoretical feasibility of this approach, and demonstrate its potential to significantly reduce the uncertainties in asteroid kinetic impact defense missions. Under invariant impact conditions, non-geometric center impacts amplify the deflection distance, underscoring a considerable research value.
Dec. 25, 2024Vol. 41 Issue 6 46 (2024)
Zhijian YU, Jiuwen YANG, Pengchong GU, and Zhenlong YUAN
The three-dimensional (3D) geographic information system can provide users with intuitive two-dimensional (2D) or 3D visual simulation scenes.The rocket ground safety control system can achieve the safety control during rocket flight by setting reasonable safety pipelines.In response to the safety control work during rocket flight and the requirements for fine display and judgment of flight situation information,the 3D geographic information system is applied to the rocket safety control situation judgments,allowing the 3D geographic information system to receive the rocket’s real-time flight data and display the rocket’s flight situation throughout the entire process.The coordinate system conversion algorithm and the object collision detection algorithm in 3D space are investigated and implemented to calculate and display the position relationship between the rocket and 3D safety pipelines in real time,by which the intuitive and accurate visualization scenes and automated safety control situation decision-making results are achieved.With the information,the safety control commander can carry out timely and accurate ground safety control judgments and implementation,and achieve the maximum safety protection for ground targets.
Dec. 25, 2024Vol. 41 Issue 6 55 (2024)

Hexaing HAN, Huifen WANG, Jun XU, Qibin ZHAO, Xiaokun SONG, Kangli CAO, and Gang LIU
The concept of metamaterials is innovated to meet the requirements of efficient heat dissipation on spacecraft surfaces,and a novel idea of efficient optical heat dissipation materials with micro-nano structure based on the resonance effect is proposed.Based on the analyses on material component selection and physical property calculation,visible light high-reflection and infrared high-emission models suitable for the efficient heat dissipation in space are investigated and established.The results show that by synthesizing one-dimensional photonic crystals with two kinds of materials,i.e.,high and low refractive index materials,ultra-high reflectance can be achieved in a few film layers.When the diamond /NaF and GaP/NaF layers are superimposed,the average reflectance in the 250~2 500 nm band is 99.97% when the total number of layers is 71.A SiO2 microsphere with the width diameter of 2~8 μm is designed to periodically align photonic crystals,the infrared emissivity of which is over 99% in the 250~2 500 nm band.The above two models are combined further.The obtained emissivity in the 3~15 μm band reaches 92%,and the obtained emissivity in the 8~15 μm band reaches 94%.The heat dissipation performance is significantly improved compared with the traditional thermal control coating.
Dec. 25, 2024Vol. 41 Issue 6 63 (2024)
Jianchi YU, Xingliang CHAI, Guoqiang GUO, Yongsheng ZHANG, Haibo LIU, and Yongqing WANG
In view of the influence of the machining global deformation on the machining accuracy during the machining process of large storage tank bottom,the machining global deformation of the curved surface of large storage box bottom is predicted and analyzed,and the compensation method for the corresponding machining error is investigated.Based on the thin shell theory and energy method,an analytical model for the machining global deformation of the curved surface of large storage box bottom is established,and a deformation compensation method based on area division and virtual reference point coordination is proposed.A finite element model is established to predict the machining global deformation of the curved surface of large storage box bottom.The machining process is simulated,and the machining error compensation value is determined according to the predicted deformation results.Machining tests are carried out,and the obtained on-machine data verify the reliability of the model.This indicates that the proposed method can accurately predict the global deformation of the storage box bottom components,and the compensation machining based on the predicted results can effectively improve the machining accuracy and efficiency.
Dec. 25, 2024Vol. 41 Issue 6 70 (2024)
Qilong BIAN, Hong WANG, Xueqing LI, Ningning ZHOU, and Tian HE
Spatial flywheels have failed repeatedly due to the friction failures of their bearing cages,which affects the safe operation and life of spacecrafts in orbit.Therefore,it is very important to evaluate the frictional state of the bearing cage of a flywheel in its ground performance test.Since cages also have friction in normal operation,how to identify their health state under friction has become an urgent problem to be solved.In order to solve such a problem,this paper presents a spatial flywheel bearing state recognition method based on the time-frequency characteristics of acoustic signals.Firstly,the acoustic signals of a flywheel in its acceleration process are obtained by the ground test bench.Secondly,the three-dimensional (3D) waterfall diagram is used to identify the frictional types of the cage,and the high-energy frictional acoustic data radiated by the flywheel during the acceleration process are obtained.Thirdly,a time-frequency analysis is carried out on the high-energy frictional acoustic data to construct the characteristic parameters that can reflect the frictional stability of the flywheel.Finally,the entropy-weighting technique for order preference by similarity to an ideal solution (Topsis) is used to construct the comprehensive evaluation index.The application results of multiple flywheels show that the bearing health state recognition method proposed in this paper has high accuracy and can provide effective guidance for flywheel ground test and screening.
Dec. 25, 2024Vol. 41 Issue 6 79 (2024)
Taoming CHEN, Jian ZHANG, Chao LENG, and Yuyang RAN
The identity authentication between the existing satellite network nodes mostly relies on a certificate authority,i.e.,an authorized authentication server,which is prone to central bottlenecks and single points of failure.Moreover,the authenticated nodes are likely to suffer malicious attacks in the future,leading to the tampering of key configuration files and thus leaving firmware backdoors.In this paper,the blockchain and smart contracts are used to build a secure communication framework for satellite network systems.Through the blockchain,an identical tamper-proof and traceable distributed ledger is provided for all nodes in the network,so that identity authentication no longer requires a trusted intermediary.The distributed identity authentication can be realized directly through point-to-point,and the integrity of the key data of nodes can be regularly verified through smart contracts to strengthen the system security protection.Finally,a prototype is implemented on an open source blockchain platform,and verifies the secure communication mechanism.
Dec. 25, 2024Vol. 41 Issue 6 88 (2024)
Yizhen YIN, Guohua KANG, Junfeng WU, Jiaqi WU, and Jindong YUAN
In the attitude maneuver scenarios of thin-film spacecraft intercepting non-cooperative targets,the attitude control is difficult due to the problems such as large area-mass ratio and large moment of inertia.In order to solve such problems,in this paper,an attitude maneuver control method based on a nonlinear variable structure sliding-mode controller is proposed.First,the flywheel is added to the common slider-sail mechanism of thin-film spacecraft as a cooperative control mechanism,and then an attitude control model is established with the consideration of the atmospheric disturbance torque,the flywheel friction torque,the inertia moment change,etc.Second,a nonlinear variable structure sliding mode controller is designed based on the error quaternion and the error angular velocity,and the stability of the control system is proved by the Lyapunov analysis method.Finally,a simulation experiment system of on-ground attitude adjustment for thin-film spacecraft based on the air-bearing platform is designed and built.The experimental results show that the controller proposed in this paper can realize the attitude maneuver control of the thin-film spacecraft in complex scenarios, restrains the influence of disturbance,and has some robustness.The work in this paper can provide an idea for the design of spacecraft controller with large area-mass ratio and large moment of inertia.
Dec. 25, 2024Vol. 41 Issue 6 95 (2024)
Yongqiang ZHANG, Xijie XU, Meizhi YAN, Yonghe ZHANG, Hefeng BAI, Zhiming ZHAO, and Hongfei CHEN
In response to the shortcomings of current satellite systems such as limited functionality,inability to quickly obtain multi-dimensional regional and target information,a cluster formation satellite model and a constellation system is proposed for complex space-based information support missions with the requirements such as high timeliness,all day,all weather,multiple means,and having the abilities of both large scale search and regional detailed investigation.Multiple small satellites of different types are designed to achieve multi-means collaborative detection and verification through intra-cluster satellite collaboration,and continuous updating and timeliness of space-based information are achieved.Multiple collaboration modes for the formation system are designed,e.g.,guidance collaboration,regional splicing collaboration,multi-means collaborative identification and confirmation,and relay continuous observation collaboration.Furthermore,the mission planning methods corresponding to the application scenarios such as guidance collaboration and relay collaboration are conducted.This effectively alleviates and solves the huge challenges that traditional single satellite implementation of complex missions brings to satellite and rocket design,and provides a low-cost,feasible,and flexible application scheme,laying a foundation for the comprehensive application of satellite cluster formation systems.
Dec. 25, 2024Vol. 41 Issue 6 106 (2024)
Zhaokui WANG, Chunwu LIU, and Yingkai CAI
Continuing human space activities have led to increasing numbers of man-made spacecrafts and non-cooperative objects in Earth’s space,which makes space security and environmental management gradually become important issues for the sustainable development of space activities.The perception and measurement of space targets are prerequisites for space environment management.It is an important means for space-based target perception to use spacecrafts as platforms for the long-range observation and cataloguing of targets throughout the day and for close-in observation and imaging of key targets.The space-based collaborative perception aims to obtain valuable attribute information of space targets by means of joint perception by multiple space-based platforms and sensors,and plays an important role in the early warning of debris and failed spacecrafts,the assessment of in-orbit satellite status,and the measurement and identification of in-orbit services.In this paper,the development of space-based perception technologies in recent years is reviewed,the key technologies in the space-based cooperative perception of space targets are analyzed,and the future development direction of these technologies is forecasted.
Dec. 25, 2024Vol. 41 Issue 6 1 (2024)
Lei ZHAO, Linggen WU, Xinlin WU, Qianru CHEN, and Zhenwu HE
Orbital maneuvering control is very common in in-orbit operations of low Earth orbit (LEO) satellites.Particularly,with the increasing popularity of electric propulsion technology in recent years,orbital maneuvering control has been widely used in LEO satellites,owing to its high specific impulse and stable thrust.Orbital maneuvering control will cause changes in the orbital parameters,and thus it is necessary to determine the post-control orbit by means of orbit-determination.However,traditional orbit-determination method does not consider the maneuver model,and requires measurement data without orbit control in a period of time.Since it is not possible to obtain enough measurement data within a short period of time,especially for electric propulsion satellites,the time of single maneuver is long,the control frequency is high,and the measurement data without orbit control is very limited,resulting in a large error in estimating the atmospheric drag coefficient.Therefore,the atmospheric drag coefficient is usually not estimated,and thus the forecast accuracy is relatively limited.In order to obtain more measurement data for orbit-determination,the frequency of orbit control is usually reduced,leading to longer and more frequent maneuver durations.In this context,a maneuver model is incorporated into the orbit determination process,considering the thrust magnitude and thrust direction of the thruster.By leveraging the measurement data during the control phase,this approach can simultaneously estimate the atmospheric parameters,the thruster thrust magnitude,and the thruster thrust direction.The least squares method is used to construct and solve the thruster perturbation model under maneuvering states,and the reliable orbit elements and atmospheric parameters are obtained.The actual global navigation satellite system (GNSS) data and orbital maneuvering verification show that the orbit-determination accuracy of the maneuvering model is basically consistent with that of the no-orbit-control phase,and more reliable atmospheric drag coefficients can be obtained due to the use of measurement data in a longer period of time.This ultimately enhances the prediction accuracy of LEO satellites under frequent maneuvers.
Dec. 25, 2024Vol. 41 Issue 6 116 (2024)
Yi CHEN, Jianyu WEI, Cuanjun ZHAO, Shaolin WANG, Weiping YANG, and Jun ZHOU
In view of the ever-increasing demand for satellite intelligence and the need for the fast calculation of the visible window between satellites and targets,the necessity of research on autonomous mission planning algorithms for satellites in orbit is continuously increasing.However,the traditional fixed step recursive algorithm cannot meet such requirements.In this paper,a fast optimization algorithm for the visible window of satellite-to-earth observation targets is proposed,which combines geometric methods and Newton’s dichotomy.Based on this,a multi-constraint and multi-objective autonomous task planning algorithm for optical satellites is proposed and verified by simulation.The experimental results show that the algorithm takes into account both computational efficiency and accuracy requirements.Compared with the traditional fixed step recursive algorithm,the proposed algorithm improves the calculational efficiency,keeps the accuracy from decreasing and easy to improve,and meets the requirements of multi-constraint and multi-objective scenarios.
Dec. 25, 2024Vol. 41 Issue 6 123 (2024)
© Copyright 2018-2021 | Chinese Laser Press.
All Rights Reserved 沪ICP备15018463号-20