





 View fulltext
View fulltext

2024
Volume: 53 Issue 1
21 Article(s)

Bin LI, Xiaofang WANG, Yan KANG, Yazhou YUE, Weiwei LI, Yixin ZHANG, Hongjie LEI, and Tongyi ZHANG
Coherent lidar has advantages of suppressing background noise such as sunlight and detecting sensitivity close to shot noise limit. It is widely used in civil and defense fields such as wind detection, velocity measurement and military target detection. Coherent detection can be divided into heterodyne detection to extract frequency information and homodyne detection to extract phase information. For velocity measurement, heterodyne detection is usually used to extract the Doppler frequency shift of the echo laser from a moving target, and then the velocity of target is retrieved. Conventional heterodyne lidar adopt normal optical detectors, such as PIN detectors, which have limited detection sensitivity for a small number of echo photons. And generally, strong local oscillator laser power is required to suppress thermal and circuit noise, but excessive local oscillator is likely to generate excess shot noise. With the development of Single Photon Avalanche Diode (SPAD) detector with low circuit noise, it not only provides a way for the detection of a small number of echo photons, but also makes it possible to realize heterodyne detection with a weak local oscillator. Researchers have successively adopted InGaAs SPAD array detectors and superconducting nanowire single-photon detectors for near-infrared spectrum, single-element Si SPAD detectors and MPPC detectors for visible spectrum, but there have been few experimental research on heterodyne detection with single-element InGaAs SPAD detector. The heterodyne lidar based on near-infrared SPAD can be integrated in all-fiber structure with an operating wavelength of 1.5 μm, which makes it more suitable for practical working platforms such as airborne. Although the count rate dynamic range of the single-element SPAD is not as good as that of the SPAD array, the current disadvantages of SPAD array, such as low pixel fill-factor, poor uniformity of pixel performance (e.g., hot pixel), and slow speed of data readout, limit its performance to a certain extent. Besides, compared with superconducting nanowire single-photon detectors, single-element near-infrared SPAD do not require extremely complex and bulky cooling system. Therefore, we established a heterodyne velocimetry experimental system based on a 1.5 μm fiber laser and a single-element InGaAs SPAD detector to analyze the influence of SPAD's dead time, dark count rate and photon count rate for the extracting of beat frequency. The output laser was shifted by 40 MHz using an Acousto-optic Frequency Shifter (AOFS) to simulate the Doppler frequency shift of the echo laser from a moving target. Then, under the experimental set up of 1 μs dead time and 1 ms data acquisition time, we analyzed the influence of different photon count rates on the SNR of the beat frequency spectrum under SPAD's dark count rates of 1.8 kHz, 54.4 kHz and 194.4 kHz. The experimental results show that, the SNR increases gradually and then tends to be stable with the increase of the photon count rate. When the photon count rate is close to saturation, harmonic frequency components appear in the low-frequency area of the frequency spectrum as well as the two side regions centered on the beat frequency. The harmonic frequency spacing is basically equal to the photon count rate. The optimal photon count rate which is slightly affected by harmonics is about 90% of saturation count rate of SPAD detector. In addition, as the dark count rate increases, the photon count rate required to extract the beat frequency signal is higher. The experimental results can provide a reference for the development and practical application of all-fiber single-photon Doppler velocity measurement lidar technology.
Jan. 25, 2024Vol. 53 Issue 1 0104001 (2024)
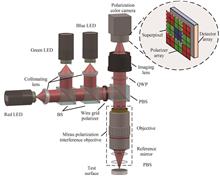
Yuting GONG, Xin LYU, Wei LIU, and Ming KONG
Micro-optical components have been widely adopted in intelligent device imaging, medical devices, and national defense security due to their high degree of freedom and arrayability. The inspection is particularly important to ensure processing accuracy prior to use. Interferometric microscopy is the authoritative high-precision micro-profile inspection technology. However, the measurement range of single wavelength interferometry is limited by the wavelength, making it insufficient to detect optical devices with high degrees of freedom. Moreover, the traditional PZT phase shift is vulnerable to environmental disturbances and can cause drive hysteresis when measuring at multiple wavelengths.The multi-wavelength polarization Mirau interference microscope for transient micro profile detection is proposed to address the issues of narrow measurement range and 2π ambiguity in single wavelength Mirau interference microscopes, enabling the testing of surface figure with large dynamic range and surface roughness of microscopic structures. It provides a simple and elegant solution to these problems that arise in the aforementioned interferometric microscopy measurements. This measurement system utilizes a splitter prism to gather three monochromatic LEDs as a multi-wavelength light source. In order to meet the testing requirements for various tested objects with different reflectivity, a linear grid polarizer is employed as a polarized beam splitter in the proposed system, to achieve polarization splitting and adjustable fringe contrast. The color polarization camera only needs to capture one image to decompose and obtain color phase-shifting interference fringes with a phase shift of π/2 in the three RGB channels. By using a four step phase shifting algorithm to calculate the transient wavefront distribution corresponding to the three wavelengths R, G, and B. Based on multi-wavelength interference technology, the accurate optical path difference between the reference light and the detection light at each pixel point can be obtained, thereby achieving instantaneous detection of the surface profile to be measured. Multi-wavelength phase shift interferometry can use measurement results of different wavelengths to correct the stripe order. By comparing the measurement results of three different wavelengths in pairs, it can simultaneously compensate for the shortcomings of single wavelength and dual-wavelength measurements. Using single wavelength interference and multi-wavelength interference to measure diamond turning convex mirrors, stripe order correction can be achieved through interference measurement results of different wavelengths, and the deviation in PV values between single wavelength and multi wavelength measurement results is less than 10 nm. The color polarization camera is the foundation for realizing transient detection in this system. In practical measurement, different incident wavefronts cause changes in the field of view error in the polarization camera and increase with the increase of wavefront slope, resulting in certain measurement errors. The cubic spline interpolation method using adjacent reconstructed pixels is adopted to correct the field of view error of the polarization camera. After correction, the PV value of phase error for the polarization camera is significantly reduced. Multi-wavelength polarization Mirau interference microscope was set up, and the micron step with the nominal value of 1.993 9 μm was measured after correcting system error with calibration data, and the deviation from the nominal value was about 5.4 nm. Comparing the single wavelength and multi-wavelength measurement results of the diamond turning convex mirrors surface profile with the measurement results of the Wyko, the detection results corrected by multi-wavelength interference technology are close to the surface profile distribution of the Wyko, indicating the feasibility of this transient measurement system for micro profile. Comparing the measurement results of the surface roughness of diamond turning convex mirrors, the results show that the RMS value deviation of the micro profile transient measurement method based on multi-wavelength interference technology compared to the measurement results of Wyko interferometer is 3.7 nm. The profile curves measured by the two measurement systems are very consistent, verifying that the system can achieve high-precision and large dynamic range measurement.
Jan. 25, 2024Vol. 53 Issue 1 0111001 (2024)
Wuyue WANG, Zhaofei XU, Chunyan QU, Ying LIN, Yufeng CHEN, and Jian LIAO
In recent years, with the rapid development of AI, the field of autonomous driving is already booming around the world. Autonomous driving is considered to be an inevitable trend in the future development of the automotive industry and will fundamentally change the way we travel in the future. Perception function is the key link of autonomous driving, and it is the guarantee of driving intelligence and safety. Accurate and real-time 3D object detection is the core function of autonomous vehicles to accurately perceive and understand the surrounding complex environment. It is also the basis of decision control processes such as path planning, motion prediction and emergency obstacle avoidance. 3D object detection task should not only predict the category of the target, but also predict the size, distance, position, direction and other 3D information of the target. China's traffic road situation is very complex, to achieve high-level autonomous driving requires a variety of sensors to work together. The use of multi-sensor fusion sensing scheme can improve the vehicle's ability to interact with the real world. At present, the advanced multi-sensor fusion detection models are too complex and have poor scalability. Once one of the sensors is wrong, the whole system will not work. This limits the ability to deploy high-level autonomous driving application scenarios. Then, the visible light sensor has some disadvantages in night, rain, snow, fog, backlighting and other scenes, which reduces the safety of driving. To solve the above problems, this paper based on the advantages of the MEMS LiDAR and the infrared camera to design a separable fusion sensing system, which is simple, lightweight, easy to expand and easy to deploy, which realizes 3D object detection task. Set the LiDAR and the infrared camera as separate branch. The both can not only work independently but also work together, decoupling the interdependence of the LiDAR and the infrared camera. If a sensor fails, the other sensor will not be affected, which improves the deployment capability of the model. The model uses the Bird's Eye View(BEV) space as a unified representation of the two different modes. The advantage of BEV space is to simplify complex 3D space into 2D space and unify the coordinate system. It makes cross-camera fusion, multi-view camera merging and multi-mode fusion easier to achieve. The camera branch and the LiDAR branch unify the 2D space and the 3D space into the BEV space respectively, and solve the difference problem of the data structure representation and spatial coordinate system of the two different sensors. The camera branch chooses YOLOv5 algorithm as the feature extraction network. The YOLOv5 algorithm is widely used in the engineering field and is easy to deploy. Accurate depth estimation is the key for the camera branch to transform image features into BEV features. So, this paper improves the camera branch. It introduces the pointclouds Depth Supervision(DSV) module and the Camera Parameter Prior(CPP) module to enhance the depth estimation ability of the camera branch. The GPU accelerated kernel is designed in image-BEV view transformation to improve the speed of model detection. Although the camera branch performance is limited, when applied to the fusion branch, the fusion branch can significantly improve the performance of single-mode branch. The LiDAR branch can choose any SOTA pointclouds detection model. The fusion branch use a Gating Attention Fusion(GAF) mechanism to fuse BEV features from different branches, and then completes the 3D object detection task. If one of the sensors fails, the camera branch or the LiDAR branch can independently complete the 3D object detection task. This model has been successfully deployed to an embedded AI computing platform: MIIVII APEX AD10. The experimental results show that the proposed model is effective, easy to extend and easy to deploy.
Jan. 25, 2024Vol. 53 Issue 1 0111002 (2024)

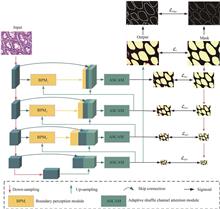
Hong HUANG, Yichuan YANG, Long WANG, Fujian ZHENG, and Jian WU
In clinical practice, segmentation and quantitative evaluation of target objects in pathological images provide valuable information for histopathological analysis, which is of great significance to auxiliary diagnosis and subsequent treatment. However, due to the dense distribution of cells and great morphological similarities between the cancer cells and normal cells, there are some challenges such as difficulty in feature extraction and unclear segmentation boundaries in the segmentation task of pathological images. At the same time, the traditional image segmentation methods are time-consuming and labor-intensive. They can only extract low level manual features, and the expression ability of deep discrimination features is insufficient, resulting in limited performance of traditional methods. Meanwhile, previous deep learning algorithms still suffer from two significant problems. Firstly, most networks ignore pixels that are difficult to segment, such as the boundaries of targets, which is particularly important for accurate segmentation. In addition, the problem of inconsistent semantic levels between different features are not solved, leading to low training efficiency. To address the above-mentioned problems, an end-to-end histopathological image segmentation network called Boundary Perception Network (BPNet) is proposed for improving the segmentation accuracy of histopathological images. Based on encoder-decoder structure, the encoder performs the convolutional downsampling operation to extract the feature information of the image through the Convolutional Neural Network (CNN). And the encoding process uses the feature encoder based on the EfficientNet-B4 network which is specifically used for pathological image segmentation. The decoder mainly consists of decooding blocks, Boundary Perception Module (BPM) and Adative Shuffle Channel Attention Moudule (ASCAM). In detail, the decoding block performs deconvolution operation to complete the decoding process of the feature information. Then, the BPM in the decoder stage aims to strengthen the ability of mining for difficult segmentation regions, so that the network focuses on the higher uncertainty as well as more complex edge regions, achieving feature complementarity and precision prediction results. For implementation, the BPM extracts the edge from the decoder output of each layer, and superimposes the edge information onto the encoded feature to strengthen the boundary feature information extracted from pathological images, outputting the enhanced edge perception feature map. Subsequently, the ASCAM is an improved chanel attention moudule which is used to make up the semantic gap between different levels of features, extrated by encoder, decoder and BPM, so as to further strengthens the feature understanding ability of the BPNet. This module exploits adaptive kernel size one-dimensional convolusion to capture the interactive information of local channels, at the same time ensures the efficiency and effectiveness of the training process. The obtained channel attention coefficient is multiplied by the module input feature layer to obtain the fusion feature, helping effectively learn the channel interaction information between features to improve the feature representation ability. Furthermore, a joint loss function based on structure and boundary is designed to optimize the targeting and detail processing capabilities of this method, achieving the better segmentation result of pathological images. Experiments are carried out on the Gland segmentation (GlaS) and MoNuSeg dataset, respectively. Both of the two datasets are devided into 4∶1 for training and validation. At the same time, in order to make up for the overfitting caused by the lack of training data, two kinds of online data enhancement methods of horizontal flipping and vertical flipping were carried out on the training set data in the experiment. And the four evaluation index, the Dice coefficient score, Intersection Over Union (IoU), Accuracy (ACC) and Precision (PRE), are used to evaluate the performance of this method propsed in this paper. The Dice coefficient score of the proposed method is 92.21% and 81.18%, the IoU is 85.55% and 68.34%, the ACC is 92.14% and 92.50%, the PRE is 92.07% and 75.46% on the GlaS and MoNuSeg datasets, respectively. Compared with the previous classical methods, such as U-Net, UNet++, MultiResUNet, TransUNet, UCTransNet and so on, the BPNet proposed gets the best segmentation result, especially retains more details in the segmentation boundary. Moreover, ablation experiments are carried out on the same two datasets for indicating the impacts of BPM and ASCAM. The results shows that the proposed BPM significantly optimizes the segmentation effect of the network for the edge, as well as the ASCAM makes up the semantic gap between features at different levels and further strengthens the feature understanding ability of the network. In conclusion, the BPNet proposed in this paper exploits BPM to generate edge enhancement feature maps, and uses ASCAM to seize crucial features. Finally, a joint loss function is used to capture the information of features at different levels in the output layer to achieve optimal segmentation performance. The experimental results have demonstrated that the effectiveness of each part of proposed method in the segmentation task of pathological images.
Jan. 25, 2024Vol. 53 Issue 1 0111003 (2024)
Fengtao HE, Qianqian WU, Jianlei ZHANG, Yi YANG, Juan ZHANG, Xinyu YAO, and Weilin ZHAO
Underwater vehicles have broad application potential in underwater environments, such as marine resource exploration, seabed geological survey, underwater operations, etc. However, underwater turbulence has a serious impact on the navigation of underwater vehicles, leading to a decrease in their ability to perceive and locate the surrounding environment, thereby affecting their task execution and performance. Underwater turbulence can cause attitude disturbances of underwater vehicles. The turbulent vortices and intense eddies cause significant changes in the flow velocity and direction, resulting in irregular thrust and resistance on the drone, making it difficult to control its attitude changes. This can lead to unstable attitude of drones, increasing the risk and difficulty of navigation.Turbulence has a negative impact on the perception and positioning ability of underwater vehicles. Due to the complexity and unpredictability of turbulence, it can cause optical speckle phenomena in underwater environments, making the images perceived by drones blurry and distorted. This leads to a decrease in the perception ability of drones to the surrounding environment, making it difficult to accurately identify and locate target objects, thereby affecting the accuracy and efficiency of task execution.In summary, the detection of underwater turbulence is crucial for the navigation decision-making and performance of underwater vehicles. By accurately detecting turbulence and making corresponding adjustments based on turbulence information, underwater vehicles can improve their navigation ability and stability in turbulent environments, thereby better adapting to complex underwater work tasks and environmental requirements. Therefore, this study proposes an innovative method for detecting underwater turbulence based on Convolutional Neural Networks (CNN) to measure the temperature difference dissipation rate of underwater turbulence. The temperature difference dissipation rate of turbulence is an important indicator to describe the intensity of turbulence and the degree of energy dissipation, which is crucial for accurately understanding the characteristics of turbulence. By measuring the temperature difference dissipation rate of turbulence, we can obtain critical turbulence information and provide accurate guidance for the navigation decision-making and control of underwater unmanned aerial vehicles. By training the CNN model, we can learn key features in underwater turbulence, thereby achieving accurate measurement of temperature difference dissipation rate. This method utilizes the advantages of CNN in image processing and feature extraction, and can fully explore the information in underwater turbulence data, providing strong support for subsequent data processing and decision-making. In the experiment, we generated a speckle image dataset with turbulent effects by simulating the power spectrum inversion method and the Huygens Fresnel principle to provide a controllable experimental environment. In order to extract key information from speckle images, we preprocessed the images. Firstly, we use Fourier transform to analyze spectral information and capture the features of different frequency components in the image. Secondly, we calculate the gradient information of the speckle image to capture the spatial changes caused by turbulence. Finally, we also extracted texture information from speckle images to obtain local structural features of the image. In order to comprehensively utilize these feature information, we superimposed spectral information, gradient information, and texture information to form a multi feature fusion image. This fusion image contains more comprehensive and rich image information, providing more valuable input for CNN models. Our CNN model has adopted some key improvement strategies in its design to better adapt to the feature extraction requirements of speckle images affected by turbulence. Firstly, we introduced a convolutional layer called stdConv2d and a GroupNorm layer. Compared to traditional 3×3 convolutions, stdConv2d uses deep separable convolutions. The depth separable convolution separates the spatial convolution and channel convolution integral between channels, thus reducing the number of parameters, improving the efficiency of the model and Receptive field. At the same time, we will replace the traditional BatchNorm layer with the GroupNorm layer, which can better handle the statistical characteristics in speckle images affected by turbulence and improve the robustness of the model. Secondly, in the improved ResNet-50 network structure, we have made adjustments to the layout of the blocks. Specifically, we have moved some blocks from the original stage4 to stage3 and increased the number of repetitions for stage3. This adjustment can better adapt to the feature extraction requirements of speckle images affected by turbulence, enabling the model to better capture the subtle changes and texture features caused by turbulence. Finally, we introduced the ViT (Vision Transformer) model, which utilizes self attention mechanism to model global contextual relationships in images. The self attention mechanism can learn the correlation between different regions in an image and introduce global perception in the feature extraction process, thereby better understanding the overall structure and contextual information in the image. Through the above improvement strategy, our CNN model has stronger expressive ability and adaptability in extracting feature information from speckle images affected by turbulence. These improvement measures can enhance the model's ability to accurately capture key features in turbulent images, and improve the accuracy and reliability of measuring the dissipation rate of underwater turbulent temperature difference. Through on-site experimental verification, our method has achieved satisfactory results in measuring the dissipation rate of underwater turbulent temperature difference. Compared with traditional methods, our CNN method fully utilizes the richness and complexity of image features, and has stronger expression ability and adaptability. Future research can further refine and expand the methods we propose. Firstly, the structure and parameter settings of the CNN model can be further optimized to improve measurement accuracy and stability. Secondly, we can consider introducing more data enhancement and regularization technologies to enhance the generalization capability of the model. In addition, other deep learning models or integration methods combining multiple models can be explored to further improve the performance and robustness of underwater turbulence measurement.
Jan. 25, 2024Vol. 53 Issue 1 0111004 (2024)
Study on Quantum Well Intermixing Induced by Zn Impurities in GaInP/AlGaInP Red Semiconductor Lasers
Tianjiang HE, Suping LIU, Wei LI, Nan LIN, Cong XIONG, and Xiaoyu MA
As the photovoltaic conversion efficiency and output power of high-power lasers continually ascend, the escalating impact of Catastrophic Optical Damage (COD) effects occurring at the laser cavity surface poses an increasingly severe challenge. Consequently, a post-processing technique involving Quantum Well Intermixing (QWI) can be employed at the cavity surface to fabricate a Non-absorption Window (NAW), thereby augmenting the COD threshold and amplifying the output power. Given the swift diffusion of Zn in GaAs-based semiconductor lasers, Zn impurity-induced QWI is favorably regarded. In the epitaxial growth of GaAs-based GaInP/AlGaInP single quantum well structures, ZnO thin films were selectively grown on the epitaxial wafer using magnetron sputtering equipment. Utilizing ZnO as the medium for Zn impurity induction, a solid-state Zn diffusion process was employed to selectively induce regions in the laser, thereby increasing the bandwidth at the laser cavity surface to prepare NAW and elevate the threshold for optical damage, consequently enhancing the long-term reliability and output power of the semiconductor laser.In addition to the induction annealing experiments conducted with a single ZnO dielectric layer, experiments were also conducted with composite dielectric layers ZnO/Si3N4 and ZnO/SiO2. These experiments involved the growth of these composite layers using Plasma Enhanced Chemical Vapor Deposition (PECVD) equipment atop the ZnO dielectric layer. Initially, through simulation calculations, it is observed that for p-type doping such as Mg impurity, as the doping concentration increases, Zn diffusion in GaAs or InP accelerates, resulting in deeper diffusion depths under the same time conditions. Conversely, for n-type doping such as Si, an increase in doping concentration impedes Zn diffusion. Moreover, the diffusion of Zn in GaAs-based epitaxial wafers surpasses that in InP-based wafers. During the diffusion process, the composite dielectric layers ZnO/Si3N4 and ZnO/SiO2 can alter the type of stress exerted by the singular ZnO dielectric layer. This shift transforms from the tensile stress applied by the ZnO single dielectric layer to the compressive stress exerted by the composite dielectric layer. The compressive stress has the potential to induce more Ga vacancies on the epitaxial wafer surface, thereby facilitating Zn diffusion within the laser epitaxial layers. Defect formation energies of Zn in AlGaAs and GaInP were also calculated, indicating the propensity of Zn to occupy Group III atoms such as Al and Ga. This supplementation contributes to a comprehensive understanding of the induction principles governing QWI. Experimental investigations, conducted under annealing conditions ranging from 580 ℃ to 680 ℃ for 20 min to 60 min, revealed that the adoption of ZnO/SiO2or ZnO/Si3N4 composite dielectric layers yielded a greater impurity-induced blue shift compared to a single Zn dielectric layer, with a maximum blue shift of 55 nm achieved under conditions of 680 ℃ for 30 min. Additionally, a study was undertaken on the long-term, low-temperature effects of composite dielectric layer ZnO/SiO2 annealing on solid-state Zn diffusion, with temperatures set at 520 ℃, 550 ℃, and 580 ℃, and times specified at 9 h. Blue shifts were observed at 0.9 nm, 1.4 nm, and 24.8 nm, suggesting the pivotal role of temperature in QWI even under prolonged low-temperature annealing conditions. Through experimental endeavors and analysis, it is established that NAW can be successfully fabricated under prolonged low-temperature annealing conditions exceeding 580 ℃ for 9 h or under relatively higher-temperature, short-duration conditions at 650 ℃ for 30 min. To minimize the impact of high-temperature annealing on the performance and quality of the epitaxial wafer, a cyclic annealing approach was adopted, employing annealing cycles at 620 ℃ for 30 min. The annealing process was repeated three times. Following 1 to 3 cycles of annealing, the observed blue shifts were 10 nm, 18.1 nm, and 35.6 nm, respectively. After three cycles, an optimal blue shift window of approximately 30 nm was achieved.This study furnishes theoretical and experimental references for device fabrication. Not only does this research offer essential information for optimizing the performance and fabrication of semiconductor lasers, but it also expands our understanding of the operational mechanisms of composite dielectric layers in the context of QWI.
Jan. 25, 2024Vol. 53 Issue 1 0114001 (2024)

Xiaoyue DONG, Shuang LIU, Guojiang BI, Keqiang WANG, and Xiaojie MAO
Stable single-frequency all-solid state laser plays an important role in resonance fluorescence lidar. Owing to the advantages of compact and stable structure, all-solid single-frequency lasers have been developed rapidly in lidar vehicle-borne and airborne applications. Recently, a scheme for tripling 1 116 nm laser to obtain the light source for iron resonance fluorescence lidar has been developed. There is a neodymium-doped yttrium aluminum(Nd∶?YAG) garnet emission line lies at 1 116 nm, which is within only a few gigahertz(GHz) of the tripled wavelength of the absorption line of iron at 372 nm. Therefore, the design of 1 116 nm single-frequency laser and the measurement of frequency characteristics is essential for iron lidar. We demonstrated a stable single-frequency 1 116 nm Nd∶?YAG laser in this paper. An optimized ramp-fire scheme is applied to realize the seed injection and frequency jitter control. This single-frequency laser has a compact all-solid structure and a good stability to be as fundamental frequency applied in iron lidar.The 1 116 nm single-frequency laser system mainly includes three parts: a distributed feedback fiber laser as the 1 116 nm seed, a side-pumped Nd∶YAG straight-cavity slave laser and a detection-control system module. The fiber laser provides a stable 1 116 nm continuous laser with a spectral signal-to-noise ratio at 79 dB. A set of wave plates is placed between seed and slave cavity to adjust the polarization before entering slave cavity. The total cavity length is set to 54 cm with two piezoelectric transducers placed on two cavity mirrors. The detection-control system module detects the match degree between seed laser and slave cavity longitudinal mode while one piezoelectric transducer vibrating. When the interference between seed and the light reflected through the cavity reaches a maximum, detection-control system turns on the Q-switch and applies a direct current voltage to the other piezoelectric transducer to compensate for the nonlinear vibration. Then the 1 116 nm single-frequency pulse is established.The realization of 1 116 nm single-frequency laser is shown. The laser produces 6.48 mJ energy at 60 Hz repetition with a pulse width of 75.7 ns. The envelop of the pulse waveform becomes smooth after seed injection because only one longitudinal mode is established. After 24 hours' measurement, the mean energy is 6.48 mJ with a standard deviation of 0.25 mJ. The wavelength is measured by a WS-7 wavelength meter and the output wavelength is stable around 1 116.297 9 nm. In lidar detection, the frequency jitter of light source directly affects the systematic error in lidar detection. So the frequency characteristics are measured in detail by heterodyne beat frequency. The full width at half maximum of spectrum is 33.2 MHz and the center frequency stability (root mean square) is 818.3 kHz, corresponding less than 1 m/s error in wind speed measurement.In this study, a 1 116 nm single-frequency pulsed laser is designed and developed based on the seed injection technology, in which the Nd∶YAG laser is side-pumped by 808 nm LD array. The obtained pulse energy is 6.48 mJ at a repetition rate of 60 Hz, and the corresponding pulse duration is 75.7 ns. The standard deviation of the energy jitter is 0.25 mJ and the center frequency stability (root mean square) is 818.3 kHz. The laser's working stability meets the requirements of lidar detection. The 372 nm iron resonance fluorescence lidar light source can be obtained by frequency tripling 1 116 nm single-frequency laser.
Jan. 25, 2024Vol. 53 Issue 1 0114002 (2024)
Wei WANG, and Yunfei TAN
Achieving high efficiency and power output for 1 550 nm Vertical Cavity Surface Emitting Lasers (VCSEL) remains a challenging issue. In the content of VCSEL, optimizing the oxide aperture size has been shown to enhance output power and slope efficiency. Additionally, multi-junction has emerged as a promising approach to boost the VCSEL chip power. The integration of these two techniques for 1 550 nm VCSEL has the potential to optimize their output characteristics. This study builds upon previous researches on 1 550 nm multi-junction VCSEL and investigates their combination with oxide aperture structures. The primary focus is on output power, slope efficiency, and photoelectric conversion efficiency. Different structures with varying oxide aperture sizes are simulated and analyzed detailedly to achieve high-power VCSEL with improved performance. The differences in output characteristics between single-junction VCSEL with and without an oxide aperture layer between the active region and N-type Distributed Bragg Reflector (DBR) were investigated before. The main comparison parameters are output power and slope efficiency. Two different oxide aperture structures are simulated and compared, the results show that VCSEL chips without an oxide aperture layer between the active region and N-DBR exhibit higher output power and slope efficiency. At an oxide aperture size of 11 μm, a single-junction 30 μm VCSEL demonstrates a threshold current of approximately 1 mA and an output power of about 57.2 mW. Furthermore, during the investigation, the simulation results can be indicated that as the oxide aperture size increases, the chip's lasing wavelength experiences a red-shift phenomenon, with a maximum red-shift of up to 6.5 nm. However, beyond an aperture size of 14 μm, the lasing wavelength hardly red-shifts. To address this shift issue, the thickness of the spatial aperture layer is adjusted to tune the chip's lasing wavelength to around 1 550 nm. Based on these findings, the paper delves into the exploration of multi-junction VCSEL. Due to the unique structure of the active region in multi-junction VCSEL, the paper considers the feasibility to add an oxide aperture layer within the active region during chip design. The oxide aperture size is adjusted and simulations are conducted to compare the output power, slope efficiency, and photoelectric conversion efficiency between the two structures. The results show that both structures achieve higher output power at an aperture size of 9 μm. For the single-layer structure, the output power reaches approximately 177.55 mW at 100 mA, with a slope efficiency of 1.79 W/A, and the maximum power conversion efficiency of 37.7% is achieved at a 10 μm aperture size. The multi-layer structure exhibits even higher slope efficiency, reaching 2.36 W/A. The comparison of simulation results shows that although the proposed multi oxide layer structure can achieve the goal of improving power, the conversion efficiency is not higher as well, which is also related to the high applied voltage. The research in this paper demonstrates the potential of oxide aperture structures in further improving parameters such as power and efficiency for multi-junction VCSEL. The combination of oxide aperture integration and multi-junction structures can provide a reference for optimizing the output characteristics of high-power 1 550 nm VCSEL, making them highly desirable for various applications in the fields of communications, sensing, and optical interconnects.
Jan. 25, 2024Vol. 53 Issue 1 0114003 (2024)
Yuping WANG, Lei ZHU, Jiaqi ZHONG, Jin WANG, Runbing LI, and Weijun LING
Atom interferometers based on the matter wave interferometry are promising tools for precision measurements. In laboratory, they have been used in the field of fundamental physics research. An important research effort is going on to miniaturize them, which can help to make them play a key role in resource exploration, inertial navigation and gravity mapping from space. The miniaturization of a laser system is a key link to miniaturize an atom interferometer. However, because the atoms used for the frequency stabilization in the existing schemes of the Raman laser system and the atoms used as the test masses in the atom interferometers are of the same type, the special optical elements and their driving devices are used to obtain the far detuning of the Raman lasers by frequency offset locking method, which makes the laser system complex and affects its reliability. Meanwhile, the increase in weight and cost of the laser system is adverse to apply them in the field of inertial navigation and space application. For an atom interferometer using one type of Rb isotope atoms as test mass, a frequency-stabilized Raman laser system based on another type of Rb isotope atoms saturated absorption spectrum is proposed to make the laser system for an atom interferometer compact and robust. This Raman laser system is helpful to miniaturize the laser systems of atom interferometers, and promotes the atom interferometers to be applied in movable platforms or in the weight-sensitive fields.For an 85Rb atom interferometer, the frequency-stabilized Raman laser system based on 87Rb atom saturated absorption spectrum is proposed to make the laser system compact and robust. First, the schematic of the stabilizing frequency and detuning of Raman laser is introduced. Second, the frequency-stabilized Raman laser system based on 87Rb atom saturated absorption spectrum is proposed. In this Raman laser system, the frequency of the Raman laser is stabilized to the 87Rb atom saturated spectrum to obtain the far detuning. Then, the laser beam from the Raman laser is modulated by an electro-optic modulator with driving frequency of 3.04 GHz. Amplified by a tapered amplifier, the carrier and +1st bandside in modulated laser beams are used as the Raman beams.The frequency stabilization experiment is done. By scanning the injection current and the voltage of the piezoelectric transducer of the Raman laser, the Rb saturated absorption spectrums are obtained. The frequency of the Raman laser is stabilized to the peak of 87Rb atomF=2→F'=CO2,3transition of D2 line, obtaining a red detuning of a magnitude of GHz and a linewidth of 80 kHz. The Raman beams generated by this Raman laser system are used to one atom interferometer of the atom gradiometer to evaluate its performance. The sensitivity of the atom interferometer using this Raman beams is 345 μGal/Hz1/2 with the interference fringe contrast of 20%. And the Allan deviation of the gravity measurement more than one day shows that the resolution of the atom interferometer is 2×10-8 g@7 500 s. It is calculated that the noise of the gravity measurement per shot contributed by the frequency noise of the Raman laser beams is less than 1 μGal.This Raman laser system uses an electro-optic modulator to generate a Raman beams, which inherits the advantages of the existing Raman schemes based on an electro-optic modulator. In this Raman laser system, a Rb cell is used as a substitute for an acousto-optic or electro-optic modulator to stabilize the frequency of the Raman laser and obtain the far detuning, which not only simplifies the light path and electric circuit of the Raman laser system, but also improves the reliability and long-term stability of the Raman beams. Both the atom interference experiment in the atom interferometer and the theoretical evaluation show that this Raman laser system is able to meet the miniaturized atom interferometers applied requirements. This Raman laser system is helpful to realize the miniaturization and weight reduction of the laser systems and promotes the atom interferometers to be applied in the movable platforms and in space.
Jan. 25, 2024Vol. 53 Issue 1 0114004 (2024)
Yichao JIANG, Shaojie GU, Gang ZHANG, Linguang XU, Qiang GE, Xuqiang WU, and Benli YU
Phase Generated Carrier (PGC) demodulation algorithm has been widely used in laser coherent vibration measurement and gained widespread interest due to its high accuracy, large dynamic range, good linearity, and low hardware overhead. However, the PGC demodulation technology is always accompanied by nonlinear distortions induced by phase modulation depth deviation, light intensity disturbance, carrier phase delay, etc. Therefore, an improved PGC demodulation algorithm is urgently required, which can effectively suppress the nonlinear distortions.In this study, we propose an improved PGC demodulation algorithm based on low frequency modulation and iteratively reweighted ellipse specific fitting, which suppresses the nonlinear distortions in the laser vibration measurement. The ellipse specific fitting is realized by introducing a 6×6 ellipse constraint matrix in the direct least square fitting of ellipse, which avoids getting a hyperbola solution, consequently. The iteratively reweighted ellipse specific fitting uses iteratively reweighted optimization technology to improve the precision of the ellipse specific fitting and reduce the weight of the outlier data, it has the advantages of ellipse-specificity, high robustness and high precison. In the imrpoved demodulation algorithm, the iteratively reweighted ellipse specific fitting is used to correct the original quadrature signals into a pair of perfect quadrature signals, which eliminates the nonlinear errors. Furthermore, to overcome the drawback of the ellipse fitting algorithm that it fails to work correctly under small phase signals, a low frequency modulation with a large amplitude is added in the carrier modulation and it guarantees the ellipse fitting accuracy regarless of the desired signal amplitudes. Finally, differential cross multiplying is used to extract the desired phase shift signal from the corrected quadrature signals.The simulations of ellipse specific fiting and iteratively reweighted ellipse specific fitting are performed and the results show that the iteratively reweighted ellipse specific fitting is superior. Then the proposed algorithm is verified in a Michelson inteferometer and the experimental results show that the Lissajous figure of the quadrature signals without a stimulus is observed to be a 1/4 ellipse arc, a 1/2 ellipse arc, a 3/4 ellipse arc and a full ellipse when the amplitude of the low frequency modulation is set as 0.035 V, 0.085 V, 0.013 5 V, and 0.185 V, respectively. Then, a 1 kHz stimulus with the amplitude of 100 mV is set, it is found that the fitted Lissajous figure deviates from the standard circle when there is no low frequency modulation while it overlaps well with the circle when the low frequency modulation amplitude is larger than 0.085 V. Thus, the accuracy of the ellipse fitting results can be gurantted by introducing a appropriate low frequency modulation. The frequency spectra of the demodulated signals under the low frequency modulation of 0 V, 0.085 V, 0.0135 V, and 0.185 V are compared, nonlinear distortions are well supressed when the low amplitude is larger than 0.085 V. The demodulation algorithms based on ellipse sepcfific fitting and iteratively reweighted ellipse specific fitting are also compared in the experiment, the Signal-to-Noise-And Distortion ratio (SINAD) and Total Harmonic Distortion (THD) of the demodulated signal based on iteratively reweighted ellipse specific fitting are improved by 1.99 dB and 0.27%, respectively. The demodulated signals of the improved algorithm at the phase modulation depth range of 0.8~3.4 rad show a high stability, the mean SINAD and THD are 42.99 dB and 0.44% with the corresponding standard deviations of 0.55 dB and 0.03%, respectively. The stimulating response linearity of the system is better than 99.99% and the dynamic range reaches 103.90 dB @ 500 Hz & THD=1%. The operating frequency band of the system is 20~8 000 Hz and two vibration signals are successfully demodulated in the experiment.The improved PGC demodulation algorithm has a promising application prospect in the field of laser vibration measurement because of the advantages of high precision, good linearity, strong robustness and high computational efficiency.
Jan. 25, 2024Vol. 53 Issue 1 0114005 (2024)
Qiang ZHANG, Caixun BAI, Di FU, Juan LI, Chenguang CHANG, Hengxiang ZHAO, Sufeng WANG, and Yutao FENG
The increase in greenhouse gases carbon dioxide and methane can directly lead to changes in the global climate and cause a significant impact on the economies of countries and human life. Methane, as the second-largest greenhouse gas on Earth, has a global warming potential 30 times higher than CO2over a 100-year period, and its lifespan is approximately 9.1 years. At present, anthropogenic CH4 emissions primarily originate from numerous point sources. Implementing measures to reduce CH4 emissions can help decrease the rate of global warming. Therefore, it is crucial to conduct research on monitoring technologies for CH4 and investigate key carbon emission sources. Hyperspectral satellite remote sensing for detecting greenhouse gases has become a candidate technology for point source detection. It has advantages such as high viewpoint, wide field of view, the ability to achieve dynamic monitoring, obtain more precise and demand-driven information data. Utilizing remote sensing methods to monitor and provide feedback on point source emissions of greenhouse gases like methane plays a crucial role in effectively addressing climate change. Existing payload technologies in China are geared towards large satellite platforms, enabling wide-area coverage with low spatial resolution monitoring. However, traditional methods such as grating spectrometry, Michelson interferometry, and spatial heterodyne are unable to meet the efficient and high-precision monitoring requirements for small-scale anthropogenic emission sources. They struggle to achieve point source detection. Therefore, it is necessary to conduct research on satellite remote sensing carbon monitoring technologies that offer high accuracy and high spatial resolution.The Fabry-Pérot interferometry technique possesses extremely high spectral resolution, capable of discerning minute wavelength differences in the spectrum. The theoretical basis of this technique is the multi-beam equal-inclination interferometry. By using an interference ring, it is possible to directly obtain the spectral information of target light at different incident angles. By collecting the spectral information corresponding to different wavelengths of the target at different positions from multiple consecutive shots, the target spectral curve is obtained. This technique establishes a relationship between CH4 gas concentration and the depth of spectral curve notches, offering advantages in point source detection with high spectral resolution and high spatial resolution. In CH4 gas detection, the parameters of the Fabry-Pérot interferometer and the optical filter have a significant impact on detection sensitivity. Properly configuring these parameters is crucial for improving detection accuracy.This paper presents a study on a high spatial resolution method for detecting point sources of methane gas based on the principle of multi-beam interferometric spectral imaging. Firstly, the working principle and detection scheme of the methane gas detector are introduced. The system parameters of the Fabry-Pérot interferometer are designed, and a forward model for methane gas detection is established. Subsequently, the correspondence between interference signals and methane concentration, as well as the influence of instrument parameters on detection sensitivity, are analyzed. In the end, iterative optimization is performed to obtain the optimal values of various optical structural parameters. The results indicate that within the methane detection wavelength range of 1 630~1 675 nm, with a free spectral range of 12.5 nm and a spectral resolution of 0.1 nm, the optimal parameters for the Fabry-Pérot interferometer are a cavity length of 0.08 mm and an intra-cavity reflectance of 97.5%. By using a cutoff filter with a range of (1 630±4) nm ~(1 675±4) nm, the relative change in interference signal corresponding to a 25% concentration variation of the detection source falls within the range of [0.65%, 4.30%], indicating a good detection sensitivity. The research results of this study provide a theoretical basis and technical support for high-precision.
Jan. 25, 2024Vol. 53 Issue 1 0130001 (2024)
Hong ZHUANG, Yinhui ZHANG, Zifen HE, and Huizhu CAO
Ammonia gas used in industry is colorless, flammable and explosive, and its diffusion is susceptible to interference caused by wind conditions and other meteorological factors. Traditional methods of detecting target locations need to spread the leak to a certain range and contact the sensor to respond, resulting in great safety risks for inspection workers and the environment. Therefore, it is of great significance to find a large-area, efficient, non-contact gas leakage detection method that is in line with the development trend of the times, can effectively solve the potential safety hazards of personnel, and reduce the impact of gas leakage on the environment.This paper proposes a fusion of structure-heavy parametric transformation of the infrared non-contact detection model network model GRNet. The candidate bounding box suitable for infrared detection of gas leakage are analyzed by K-means clustering to preset the model parameters. Whereafter, the gas leak infrared image is preprocessed using the data enhancement method of Mosaic-Gamma transformation, so that the image combines the contextual information of 4 different forms of gas leak areas, enriches the leak scene, and increases the training batch size in disguise during training. This improves the generalization ability of the model and improves detection accuracy. Moreover, the CIoU localization loss function is used to optimize the size and center position of the leakage area to improve the predicted accuracy in locating the leakage area. Finally, the improved lightweight RepVGG module is adopted to reconstruct the feature extraction network instead of the convolutional layer of the feature extraction network, which enhances the feature extraction capability of the model, reduces the number of model parameters, compresses the size of the model, and improves the speed of model inference. The final GRNet model for ammonia leak infrared detection improves the mean average precision, single image test time, model size, and number of parameters by 2.70%, 11.76%, 27.43%, and 28.90% over the original YOLOv5s base model, reaching to be 94.90%, 3.4 ms, 11.30 MB, and 5.47 MB, respectively.Next, this paper adopts the pseudo-color mapping technology to qualitatively analyze the gas leakage concentration to achieve the visual perception effect of the leakage concentration which helps to improve the efficiency and accuracy of the staff's emergency response. And PyQt5 is used as the implementation tool of the graphical system interface to encapsulate the constructed network model, which is more intuitive and easy to operate to achieve the visualization of the interface of the gas leakage infrared detection system. Finally, the effectiveness of the GRNet model for the gas leak detection task is further verified in the embedded development device, the GRNet model in the detection speed detection speed compared to YOLOv3, YOLOv5s improved to reach 3.03 frames/s, while the detection accuracy is consistent with the PC in this paper there is no loss of up to 94.90% accuracy. This indicates that the GRNet model is compatible with faster detection speed while leakage detection is effective, and the feasibility of deployment on an embedded development platform is relatively high.This paper can provide ideas for deep learning model design and leakage concentration analysis as well as deployment for the development of gas leakage non-contact detection devices to ensure the safe production of gas-related enterprises and stable operation.
Jan. 25, 2024Vol. 53 Issue 1 0130002 (2024)
Zhonglian WANG, Shaopeng REN, Peng GAO, Xiaojun YIN, Shuaifeng ZHAO, Chao BAN, Ming DONG, Ruisheng WANG, Haiyu LOU, Zhiqiang YU, and Tianhao LIU
Fluorescence endoscope, which enables simultaneous visible light imaging and near-infrared fluorescence molecular imaging, is a result of advanced endoscopic theories and cutting-edge technologies. This instrument holds great potential to become an essential visual monitoring system in future targeted surgeries. The optical performance of the notch filter within the fluorescence endoscope plays a pivotal role in determining the clarity and precision of identifying fluorescence images of lesions, thereby influencing the endoscope's efficacy in supporting diagnostics and advancing precision medicine in clinical practice. Consequently, research into critical technologies related to notch filter for fluorescence endoscopy and the development of high-performance filter products demonstrate significant clinical application prospects and scientific significance. By aligning the operational principles of the fluorescence endoscope with the spectral profiles of corresponding fluorescent reagents, we can define the technical specifications for notch filter. Based on the theory of optical film, we have designed a notch filter utilizing K9 substrates, characterized by the deposition of notch coating and anti-reflective coating on both sides. The design of the notch coating was achieved by optimizing the matching of high and low refractive index coefficients, which is based on an in-depth comparison of the merits and drawbacks of Rugate filters, Rugate filters with step-change refractive index, methods for matching high and low refractive index coefficients, and other notch structures. Moreover, we employed Essential Macleod software in conjunction with various optimization synthesis methods to achieve high passband transmission, minimal ripple, excellent blocking property for the excitation light source, as well as a steep transition from the excitation spectrum to the emission spectrum. This approach ultimately enables efficient suppression of the excitation light and efficient capture of fluorescence signals, playing a crucial role in accurately identifying lesions. To ensure precise control, a plasma reaction magnetron sputtering coating device is selected after simulating and analyzing the standard deviation of film thickness. The coating process involves ultrasonic cleaning and drying of substrates to maintain cleanliness, followed by heating the vacuum chamber to 200 ℃ and maintaining a constant temperature for 30 minutes to remove gas. This is followed by ion bombardment of substrates for 120 seconds to activate the surface. The deposition rates for Nb2O5 and SiO2 are both set at approximately 0.5 nm/s for coating applications. To ensure complete oxidation of the sputtered film, we employ an oxygen partial pressure sensor (λ-sensor) to monitor the deposition process and measure oxygen content. The system is equipped with an Optical Monitoring System (OMS) film thickness control system that uses a combination of Backward, Offset, and Forward algorithms to accurately calculate and correct the stop position of film thickness. This approach enables precise control over sensitive layer thickness in complex film systems, thereby reducing the impact of errors on the overall spectrum. By carefully selecting substrates with wavefront aberration control and implementing stringent coating process control methods, we ensure that the wavefront aberration remains below λ/4 @632.8 nm, effectively minimizing optical system aberrations. After two rounds of meticulous process optimization, the filter's average transmittance within the passband exceeds 97%, while maintaining an exceptional blocking capability of OD6 and a wavefront aberration below λ/4 @ 632.8 nm, meeting the demands for precision applications in medical and minimally invasive surgery.
Jan. 25, 2024Vol. 53 Issue 1 0131001 (2024)
Jinhu ZHENG, Bingshen XU, Henan SHEN, Fei YU, and Jian CHEN
Multicore Fiber (MCF)/imaging fiber bundle is a key device of flexible optical endoscope. In imaging applications, MCFs are widely used in the non-coherent imaging which transmits the intensity distribution only. The bending sensitive distortion of phase plane and inter-core crosstalk bring challenges in the coherent imaging application. In this paper, a Helical-Core MCF (HC-MCF) is designed for the application of coherent imaging.Due to the intricate nature of HC-MCF, neither semi-analytical models nor empirical methods can fully resolve the modal properties. Consequently, a full-vector finite-element method is employed for numerical simulation of HC-MCF. By utilizing the optical transformation technique, HC-MCF in the natural space is equivalently represented in the helical coordinate maintaining the translation invariance. The original isotropic permeability and dielectric constant (both scalars) of the optical fiber material are adjusted to equivalent dielectric constant and equivalent permeability values. This simplification can effectively reduce the computational complexity of the field distribution and equivalent effective refractive index of fundamental mode in HC-MCF. By using this method, the inter-core group delay differences of HC-MCF is simulated for optimization of fiber design.Then, an optimized design of HC-MCF is proposed. In order to minimize the distortion of phase front after transmission in HC-MCF, each core of HC-MCF should have a similar optical path. An appropriate core spacing should be selected to balance between the spatial sampling density and crosstalk among fiber cores. The helix period is preferred smaller than the critical bend radius in the application. Our final design of HC-MCF are arranged in a densely stacked hexagonal configuration, comprising 6 layers with a total of 91 cores. The radii of the fiber cores are 4 μm, 3.3 μm, 3.1 μm, 3 μm, 2.9 μm and 2.8 μm from the inside to the outside, with a core pitch of 20 μm and helical pitch of 10 cm. The inter-core group delay difference per unit length of straight HC-MCF is calculated and the maximum is found to be 6 fs/m. When the bending radius is significantly larger than the wavelength, the change in mode equivalent refractive index caused by bending is disregarded, and the variation in group delay difference resulting from core bending is determined solely by changes in core geometry length. The trajectory equation of the bent core is derived to obtain its geometry length, enabling determination of the corresponding change in group delay. Calculations are performed for two different bending radii (0.5 m and 0.05 m) to assess variations in group delay difference per unit length for helical fibers under these conditions. Remarkably, similar changes are observed under both bending scenarios, indicating that alterations in bend state do not induce significant phase modifications within transmitted light fields. By carefully designing the structure of HC-MCF, excellent bend performance can be achieved.At last, the bend induced inter-core crosstalk of HC-MCF is calculated. The crosstalks between cores of adjacent layers for HC-MCF with a total length of 100 m, torsion rate of 20 π/m, and core spacing of 20 μm are calculated and compared. Due to slight variations in mode phase mismatch between different layers during bending, there exists a maximum crosstalk value when phase matching conditions are satisfied. When the bending radius is smaller than that at which phase matching occurs, inter-layer core crosstalk becomes insensitive to bending radius and maintains a consistently low level. In this design, featuring slightly varied core sizes and a helical structure within each layer, and an exceptionally low level of crosstalk (-550 dB/100 m) is achieved. This remarkably reduced crosstalk could significantly enhance the imaging quality.Due to the helical core design of the designed helical MCF, the complex random disturbance of the optical field phase transmitted by the multi-core fiber under the bending condition is reduced, and the group delay difference caused by the bending between the cores is effectively suppressed. HC-MCF can help to reduce the complexity of the coherent image restoration, which finds useful applications in fiber optic micro-imaging, ultrafast laser imaging and other fields.
Jan. 25, 2024Vol. 53 Issue 1 0106001 (2024)
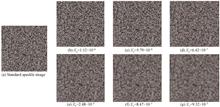
Guangyao LIN, Fei HU, Zhongli JI, and Zhen LIU
In order to evaluate the efficiency and performance of the natural gas compressor outlet oil separator, a concentration detection method of micro-nano-scale oil mist droplets based on the light scintillation theory was proposed for the low-concentration lubricating oil mist downstream of the compressor outlet oil mist separator under the condition of 0~50 mg·m-3 low concentration oil mist concentration. Based on the particle phylolayer model, Lambert-Beer law and Poisson distribution, the theoretical model uses the total scattering theory to derive the particle concentration calculation model under the long-optical path parallel uniform beam by segmenting the measuring volume in the beam field and taking the transmittance of each monolayer measuring volume as the statistical random variable of Poisson distribution, and explains the causes and influencing factors of the optical scintillation method.For compressor lubricants in the natural gas industry, ISO viscosity grade 460 lubricants were selected, and spectral scanning and Principal Component Analysis (PCA) determined that the 400 nm wavelength beam had the best detection sensitivity and positive correlation in the visible light band. At the same time, the infrared spectrum and three-dimensional fluorescence spectrum of lubricating oil show that the infrared band has a strong absorption effect in hydrocarbon gas medium, and the fluorescence effect of lubricating oil in the ultraviolet band will aggravate the stray light in the optical path and affect the test accuracy. For the flicker frequency in the optical scintillation method, the selection of the flicker frequency is determined by the spectral change measurement, and the selection of the flicker frequency affects the detection accuracy by affecting the fitting variance of the scintillation signal, and the flicker frequency is determined according to the size of the measuring body, particle diameter and particle velocity.The results show that in the range of 0~50 mg·m-3 oil mist concentration, there is an obvious linear relationship between oil mist concentration and flicker signal variance under the appropriate flickering frequency by optical scintillation method, and the linear correlation coefficient R2=0.989. In the calibration test results, the linear correlation coefficient R2=0.989, and the test error is less than 10%. However, the error of the long-path light transmission method detection calibration results gradually decreases with the concentration, and the linear correlation coefficient R2=0.956. Compared with the long-path optical transmission method, the error of the optical flicker method is lower than that of the optical transmission method at very low concentration, and with the increase of the calibration concentration, the test error of the optical transmission method gradually decreases and is comparable to that of the optical flicker method. The above analysis shows that the optical flicker theory can realize the real-time online detection of oil mist concentration at low concentration, and the method is not affected by optical window pollution, and the optical structure is simple, which is expected to be used for real-time online monitoring of compressor outlet under high pressure in the future.
Jan. 25, 2024Vol. 53 Issue 1 0112001 (2024)
Gallium Fixed-point Blackbody Radiation Source for Calibration of Sea Surface Temperature Radiometer
Kailin ZHANG, Zhiyuan ZHAO, Chuanyun REN, Minglun YANG, and Liqin QU
A gallium fixed-point blackbody infrared radiation source is designed to calibrate the sea surface temperature radiometer. Due to the fact that the sea surface temperature radiometer requires additional regular calibration data before and after deployment to monitor the performance characteristics of the instrument, water bath blackbodies and ammonia heat pipe blackbodies are commonly used internationally for calibration. However, water bath blackbodies are greatly affected by atmospheric pressure, and ammonia heat pipe blackbodies are large in volume and difficult to transport. Therefore, a gallium blackbody is designed for the calibration of sea surface temperature radiometers.Firstly, the structure and working principle of a gallium fixed-point blackbody radiation source are introduced. The simulation software, which is based on the Monte Carlo algorithm, then simulate the emissivity of STEEP321 blackbodies and conducted experiments to measure the emissivity. The source of emissivity uncertainty is discussed. Experiments on phase transformation reproducibility of gallium under electric heating and water-bath heating are carried out and the effect of electric heating power on phase transformation reproducibility of gallium is discussed. Finally, the measurement experiment of ISAR thermometer radiometer is carried out to verify the blackbody.The results show that the emissivity is better than 0.998 8, and the emissivity measured by the radiation method is in good agreement with the theoretical simulation results, and the measurement repeatability (standard deviation) reaches 0.1%. The results show that the reproducibility of phase change temperature table is better than ±0.03 K. The difference between ISAR and FLUKE 1524 measurements of the temperature near the blackbody cavity is within ±0.15 K.The blackbody is developed successfully and can be used to calibrate the sea surface temperature radiometer after modification, and it can provide calibration sources for the development of sea surface temperature measurement equipment with independent intellectual property rights. The theoretical calculation of emissivity is high, but the actual measurement of emissivity is lower than the theory for the following reasons: the ratio of black body cavity length to opening diameter is not large enough, and the uncertainty in the measurement process of emissivity. The craft used for the fixed-point container is generally to spray polytetrafluoroethylene film on its surface. Thicker polytetrafluoroethylene cylinder and polytetrafluoroethylene sleeve are installed with gallium fixed point, which greatly avoids the pollution caused by direct contact of metal when the sprayed polytetrafluoroethylene film is relatively thin.
Jan. 25, 2024Vol. 53 Issue 1 0112002 (2024)
Tao LIU, Zhibin WANG, Jiaqi HU, Yaonan HE, Weichang JING, Enjing CHEN, Wenlong ZHOU, Guoming YU, Ning YANG, Di ZHAO, Guofeng ZHANG, and Shuming YANG
White Light Interferometry (WLI) is a classic low-coherence interferometry. The surface height information can be obtained with ultra-high precision through the positioning of zero optical path difference position of white light interference. At the same time, compared with point-sectioning laser confocal microscope, WLI is a surface-sectioning tomography technology. In particular, its vertical resolution is comparable to that of an atomic force microscope. White light interferometry measurement technology has been widely used in the inspection of semiconductor wafer defects, Micro-electromechanical System (MEMS) sensing structures, ultra-precision optical components, and film thicknesses. Generally, this technology originated in the late 1980 s in the United States, and domestic researches in this field started late, with the overall technology lagging behind. In terms of the instrumentation, although there have been breakthroughs, core components still rely on imports, such as interference objectives, nano-positioning scanners. A large field-of-view white light interferometric measurement system was built and tested. In this system, a domestic white light interference objective with a lateral magnification of 2 was used and a 0.5× adapter lens was preferably configured in the imaging system in front of the image detector. For the white LED illumination source, a suitable bandpass filter was theoretically evaluated and experimentally confirmed. The center wavelength was determined through the experimental curve of white light interference along the axial direction. The actual magnification of WLI system and the distortion of the field of view were achieved through imaging of a two-dimensional microscopic grid sample. The actual maximum field-of-view at the object side has reached 14 mm. By selectively filtering the spectrum of the white light source, the white light interference signal can be effectively modulated. According to this, the axial resolution and horizontal resolution can be changed within a certain range. For example, by changing the center wavelength of the incident light, the horizontal resolution can be changed according to the Rayleigh criterion. Experimental results show that: a more ideal white light interference axial response curve is obtained through suitable spectral filtering; the maximum field-of-view at the object side is as large as 14 mm; the measurement results of standard step samples with heights of 2.04 μm and 20.43 μm are 2.05 μm and 20.47 μm, and the repeatability (standard deviation) of 10 measurements is 12 nm and 16 nm, respectively. The measurement result of the 2.04 μm height step was also compared with the result obtained by the atomic force microscope. Actual measurements were conducted on the roughness sample, MEMS sensing structure and semiconductor wafer film, demonstrating the feasibility of the developed system in the field of three-dimensional optical non-destructive precision inspection. For large field-of-view WLI systems, the horizontal or lateral resolution is on the order of a few micrometers, so it is difficult to apply WLI to the three-dimensional reconstruction of fine microstructures. This is an important shortcoming of large field-of-view WLI systems. Besides, through research, it was found that for ultra-smooth surfaces, such as polished wafers, it is difficult to measure using traditional vertical scanning interferometry technology, and the phase shifting method should be used. Measurement of film thickness may be used to monitor morphological changes in biological transparent film layers. Further research can focus on high-performance white-light interference objectives, automation of the white-light interferometry measurement process, and implementation of large field-of-view high-resolution white-light interferometry methods.
Jan. 25, 2024Vol. 53 Issue 1 0112003 (2024)
Jinyang WEI, Xuyang LI, Longyu TAN, Hao YUAN, Zhiguang REN, Jiawen ZHAO, and Kaizhong YAO
In space target observation missions, there is a need for highly sensitive target detection and high-quality imaging. However, there is a significant disparity in the field of view between detection and imaging, and currently, two primary solutions are predominantly employed. One approach involves the design of two independent subsystems, while the other method utilizes a shared-aperture dual-channel design to integrate the functions of detection and imaging into a single system. However, designing two independent systems necessitates a substantial amount of space to accommodate these two subsystems, often exceeding the carrying capacity of most existing space optical payloads. On the other hand, adopting the shared-aperture dual-channel system requires additional electronic components and structural elements, with challenges during the assembly and calibration processes. This may potentially lead to uneven energy distribution issues. In order to achieve high sensitivity detection and precise identification of space targets, this paper introduces the design of an optical system based on a continuous zoom structure that balances a large aperture with a long focal length. This system aims to achieve short focal length and wide-field target detection, as well as long focal length and narrow-field target imaging. In terms of the design methodology, the inherent complexity of the system makes it challenging to obtain an ideal structure during the optimization process. Consequently, this system combines the structures of reflective mirrors and corrective lenses with a zoom structure through optical pupil matching. It employs two reflective mirrors to compress the optical path. During the zooming process, both the zooming components and compensating components move together to maintain the position of the image plane. At the intermediate zoom position, image quality is excellent, allowing for continuous target tracking. To address the issue of uneven energy distribution within the system, this optical system utilizes a shared-aperture detection and imaging integration structure. Furthermore, with an aperture size of 280 mm, the system can detect targets as faint as magnitude 14, effectively resolving the challenges associated with detecting faint and weak targets. The system operates within the spectral range of 450 nm to 850 nm and focal lengths ranging from 700 mm to 3 500 mm. At the detection end, the focal length is 700 mm, with an F-number of 2.5 and a field of view angle of 0.5°×0.5°. At the imaging end, the focal length varies from 1 400 mm to 3 500 mm, with F-numbers ranging from 5 to 12.5 and a field of view angle of 0.18°×0.18°. At the detection end, 80% of the optical spot's encircled energy is concentrated within 17.4 μm. At the imaging end, the edge field MTF is 0.36, approaching the diffraction limit, while at the intermediate zoom position, MTF values range from 0.31 to 0.36, ensuring consistent image quality during the zooming process. This system integrates the detection and imaging systems into a single unit, achieving shared-aperture functionality. After conducting tolerance analysis on the system, it was observed that under relatively loose tolerances, MTF degradation in both the sagittal and tangential directions is minimal. Moreover, at an 80% probability, the optical spot diameter is smaller than 18.4 μm for each field of view, indicating that the system maintains excellent detection and imaging performance even under these relaxed tolerance conditions. The zoom cam curve is a critical design parameter for zoom systems, and in this system, the cam curves for both the zoom and compensator groups have an apex angle of less than 30°, meeting the design requirements. This system offers strong detection capabilities, excellent image quality, a compact overall length, and a minimal zoom cam curve apex angle. In terms of structure and design objectives, it provides valuable insights for the future development of continuous tracking integrated optical systems for the detection and imaging of targets.
Jan. 25, 2024Vol. 53 Issue 1 0122001 (2024)
Rong LIANG, Xiaojun ZHOU, Chunbo ZOU, Huangrong XU, Chenxi LI, Tao YU, and Weixing YU
Since the first detection of gravitational wave, gravitational wave astronomy has advanced swiftly. As a crucial component of the detection system, the gravitational wave telescope is obviously crucial. The highly stable laser telescope with a low wavefront error and a high suppression ratio of stray light is a crucial medium for the detection of gravitational waves, as it must not only transmit energy in the order of watt to distant spacecraft, but also receive weak laser signals in the order of picowatt from other satellite base station located millions of kilometers away. Therefore, the backward stray light of the local telescope is required to reach 10-10 orders of the incident laser power. Considering the requirements of small size, light weight, and high compactness, it is clear that the benefits of a reflective system cannot be compared to those of a transmission design. In general, the coaxial Cassegrain structure and off-axis multi-mirror structure are utilized. The off-axis design is preferred over the coaxial design for gravitational wave telescopes due to advantages such as the ability to optimize multiple parameters, the absence of a central obstruction, and the high energy collection capacity. In this paper, based on the design of off-axis four-mirror and the theory of coaxial reflection system, we designed and optimized the telescope combined with the characteristics of high magnification, low wavefront error and high suppression ratio of stray light. In the capture field of view of ±200 μrad, we realized the compression ratio of 100 of telescope, and the entrance pupil diameter of the principle system is 300 mm, whose design result of wavefront error is less than of λ/80 because the actual outgoing wavefront error must be less than λ/40. The system distortion of the edge field is less than 0.056 9%. In order to verify the processing and alignment of the principle system as well as the ability of stray light suppression of it, a 0.5 times scale system is established beneath the system with a wavefront error less than λ/175. Internal stray light is suppressed by increasing the light turning angle between the tertiary mirror and quaternary mirror on the condition of low wavefront error of λ/80. The optimized deflection angle of the tertiary mirror is 5.5 degrees, and the tertiary mirror is the plane surface, which can significantly reduce the difficulty of processing and alignment. A simulation of stray light is applied to analyze the stray light of our designed telescope. The steps of stray light analysis consist of the following steps: 1) selection and optimization of the optical structure; 2) model setting of the corresponding reflection, scattering, and absorption surfaces; 3) stray light analysis of the entire system; 4) iterative optimization design; 5) fulfillment of the system's requirements. Therefore, we investigated the optical paths and power of the backscattered stray light. After positioning the field stop in the middle image plane between the secondary mirror and the tertiary mirror, the proportion of the stray light caused by the secondary mirror is the smallest. The stray light energy caused by the tertiary mirror and the quaternary mirror is the largest, which can reach more than 90%. The tolerance of the optical design is also analyzed, and the results of the analysis indicate that the tolerance of the parabolic primary mirror has the strongest impact on the wavefront error of the system. The principle system has a 90% cumulative probability wavefront error less than λ/40, which can satisfy the design requirement of gravitational wave detection and have the potential to play a significant role in future missions aimed at low wavefront error, high magnification and a high suppression ratio of stray light in the telescope while detecting gravitational waves.
Jan. 25, 2024Vol. 53 Issue 1 0122002 (2024)
Liwei ZHU, Lei YANG, Jie CHEN, Wenping ZHANG, Shiliang GUO, and Hongbo XIE
Reflective optical systems are normally divided into two types: coaxial reflective module and off-axis reflective module. Although the coaxial reflective module is capable of achieving a long focal length, it also has several obvious drawbacks such limited field of view and low utilization efficiency of propagating light due to obscuration. On the contrary, the off-axis reflective module has the particular capabilities of long focal length, wide field of view and high spatial resolution in diverse applications. Generally, an off-axis reflective systems are normally created from a coaxial reflective system based on the Seidel aberration theory. What is more, an unobscured off-axis system is obtained by using an offset aperture stop, a biased field, or combining both. However, the coaxial reflective systems are often far from the final off-axis reflective systems. Therefore, optimizing the coaxial reflective system without particularly constructing often costs much calculation time, and it is easy to fall into a local optimal solution during the optimization process.This paper proposes a new method for establishing the initial structure of an off-axis four-mirror optical system. At the beginning of the design, we chose a reasonably biased field to obtain off-axis reflective systems. Introduce the ray transmission matrix to simplify the paraxial ray tracing and calculate the Seidel aberration by tracing the chief and marginal ray. The Seidel aberration we obtained is a function including the radius of curvature and the mirror spacing. The traditional method of solving the initial structure is to make the Seidel aberration zero. When many constraints are defined, there may be no solution for all Seidel aberrations to be zero. This problem can be transformed into an optimization problem for solving the objective function. The objective function is to minimize the sum of the absolute values of the five primary aberration coefficients while adding some constraints, such as the back focal length and focal length requirement. Particle Swarm Optimization (PSO) suits high-dimensional nonlinear optimization problems. Therefore, the PSO algorithm is used in this paper to optimize the objective function. However, the PSO algorithm is affected by many factors, among which the initial particle value greatly influences the final result. Therefore, generating many random initial points is adopted to analyze and compare the results and select the solution results with a small objective function value. After that, we use a biased field to select the unobscured system through the data interaction of MATLAB and CODE V.The specific algorithm process is as follows: an initial biased field is given in advance, and the particle swarm optimization algorithm solves the objective function to find multiple sets of feasible solutions. The calculated radius of curvature and mirror spacing are imported into CODE V. Then, we call the CODEV API through MATLAB to obtain the data of the corresponding point. Judging whether the initial structure satisfies the unobscured condition by calculating the distance between points and lines. If a suitable unobscured structure is not found, change the biased field, re-find the optimal solution, and re-judge whether the corresponding point-line position relationship is satisfied. Since the diameter of the entrance pupil and the field of view is small when constructing the initial structure, it is necessary to gradually expand the diameter of the entrance pupil and the view in the optimization stage to meet the requirements of the design parameters.Generally speaking, if there is a large difference between the initial and final design parameters, increasing the entrance pupil diameter and view manually will take much time. However, if the entrance pupil diameter and view are too large for each iteration, it will lead to falling into a local optimal solution or being unable to realize ray tracing. To solve the time-consuming problem of manually increasing the entrance pupil diameter and field of view, this paper combines MATLAB and CODE V software to avoid repetitive optimization processes. By calling CODE V API through MATLAB to achieve data interaction between the two software, MATLAB can modify system parameters (entrance pupil diameter, the field of view, etc.). At the same time, the program for optimizing the off-axis four-mirror is saved in the form of a macro file, which is convenient for realizing the optimization of the off-axis four-mirror by calling the macro file in MATLAB. Through this method, the system’s expansion from a small entrance pupil and a small field of view to a large entrance pupil and a large field can be realized more quickly and efficiently. At the same time, XY polynomials and high-order aspheric surfaces are introduced to correct high-order aberrations. The proposed automatic design method studied has certain theoretical and practical value in designing off-axis reflective systems.
Jan. 25, 2024Vol. 53 Issue 1 0122003 (2024)
Bing SONG, Jinrong WANG, Hengyu ZHANG, Zhenyuan SUN, and Qingjiang LI
The rapid development of artificial intelligence has posed new and higher demands on computing systems. Electronic computing systems, represented by Graphics Processors Unit(GPU), adopt the von Neumann architecture, which results in frequent data migration and high energy consumption due to the separation of processors and memory. The parasitic capacitance in electronic computing systems also hinders further improvement in computing speed, making it unable to meet the needs of further development of artificial intelligence for high-speed and high-efficiency computing hardware. The rapid development of integrated photonic devices has provided a feasible solution for achieving high-speed and high-efficiency computing hardware. The tunable multivalued devices based on Mach-Zehnder interferometers are a major technological approach in constructing photonic intelligent accelerators. These devices have the advantages of wide bandwidth and temperature insensitivity, making them an excellent choice for photonic hardware accelerators. Phase-change materials have the characteristics of continuously adjustable refractive index and non-volatile retention. Combining phase-change materials with Mach-Zehnder interferometers can achieve non-volatile multivalued properties, providing a new device foundation for constructing photonic intelligent accelerators. In this paper, a non-volatile photonic multivalued device with an Indium Tin Oxides (ITO) microheater is designed based on the combination of phase-change materials and Mach-Zehnder interferometer modulators. First, the structure of the photonic multivalued device is designed. Sb2Se3 is chosen as the phase-change material, and ITO is selected as the microheater material. The Sb2Se3 is deposited on one arm of the Mach-Zehnder interferometers waveguide, and ITO is deposited on top of the Sb2Se3. Cr/Au is deposited at the edge of the ITO to form electrodes. When the state of Sb2Se3 changes, it affects the phase of the transmitted light on the Mach-Zehnder interferometers waveguide, thereby changing the output of the Mach-Zehnder interferometers. This scheme has the advantages of faster modulation speed and higher modulation precision, enabling state transitions of the device to be achieved in milliseconds. The thermal distribution of the microheater has an important influence on the phase transition of the phase-change material. Two different microheater structures are designed and simulated using COMSOL software, including a square-shaped ITO and a structure with wider edges and a narrower middle. Through electrical-thermal simulations, it is found that the second structure can concentrate the generated heat more effectively and improve the efficiency of the microheater. Furthermore, the length and thickness parameters of Sb2Se3 are optimized through simulations in Lumerical software. Lengths ranging from 20 μm to 50 μm and thicknesses ranging from 10 nm to 40 nm are chosen. Finally, a length of 30 μm and a thickness of 30nm are determined as the optimal parameters for Sb2Se3, which maximize the modulation window of the device. The device is fabricated using processes such as photolithography, magnetron sputtering, and inductively coupled plasma etching. During the testing process, electrical pulses are applied to the microheater, with a pulse width of 1ms and an amplitude of 13.4 V. The tests demonstrate that the device achieves multivalued modulation with over 32 states (5 bits) during the application of electrical pulses. Several states are also selected for the retention characteristic tests, which show that the device can maintain stable states for up to 20 minutes, indicating good non-volatility. Finally, the spectral characteristics of the photonic multivalued device are tested to determine its bandwidth. The tests show that the output of the device remains stable between 1 540 nm and 1 580 nm, indicating certain broadband characteristics and providing a foundation for parallel computing. This electrically modulated non-volatile photonic multivalued device serves as a fundamental unit for large-scale non-volatile reconfigurable photonic hardware neural networks. In the future, the performance of this device can be further improved by exploring new microheater designs, aiming for lower power consumption and more adjustable states in photonic multivalued devices.
Jan. 25, 2024Vol. 53 Issue 1 0123001 (2024)
© Copyright 2018-2021 | Chinese Laser Press.
All Rights Reserved 沪ICP备15018463号-20