




 View fulltext
View fulltext

2022
Volume: 30 Issue 20
12 Article(s)

Tianyu LI, Guangxu LI, Chen ZHANG, Fangting LI, and Deheng LI
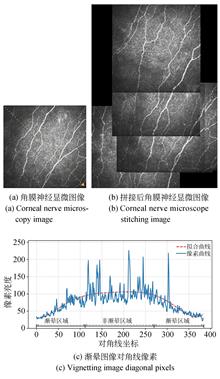
The effect of a small field of view of microscopic images can be improved by stitching corneal nerve images. Owing to the vignetting effect of microscopic images, the stitched images can produce artifacts at the stitch site, affecting the diagnosis. To solve the problem of vignetting artifacts in stitched images, this study presents a method for correcting image vignetting by using nonlinear polynomial function modeling. First, a vignetting model is established for a single corneal neural image, constraints consistent with the physical properties of the vignetting are set, and the parameters of the vignetting model are iteratively optimized using the Levenberg–Marquardt optimization algorithm. During each optimization iteration, the logarithmic information entropy is calculated to determine the correction effect of the current vignetting model and prevent overcorrection of the image. At the end of the iterative optimization, the vignetting model is reversed to compensate for the original image and complete the vignetting correction process. A comparison of the stitched images before and after correction reveals that the corrected images have no obvious vignetting artifacts at the stitch site. Experiments on the images of five patient groups show that the mean values of the mean squared error, peak signal-to-noise ratio, and structural similarity evaluation indices of the corrected images reach 0.004 2, 72.225 1, and 0.960 0, respectively, with the best correction effect. The correction effect of the proposed algorithm is significantly better than that of other similar algorithms. The proposed method can effectively correct corneal image vignetting effects without cameras or environmental brightness parameters being fixed in advance. The corrected-image stitching effect is good; corneal-nerve stitching images that are more accurate and clearer with a larger field of view can be obtained.
Oct. 25, 2022Vol. 30 Issue 20 2479 (2022)
Deqiang CHENG, Jiamin ZHAO, Qiqi KOU, Liangliang CHEN, and Chenggong HAN
Existing single-image super-resolution algorithms lose high-frequency details and cannot extract rich image features. Therefore, an image super-resolution reconstruction algorithm based on a multi-scale dense feature fusion network is proposed to efficiently utilize image features. This algorithm extracts image features of different scales by employing the multi-scale feature fusion residual module with convolution kernels of different scales. It fuses different scale features to better preserve the high-frequency details of images. A dense feature fusion structure is adopted between modules to fully integrate the feature information extracted from different modules, to avoid feature information loss and obtain better visual feeling. Several experiments show that the proposed method can significantly improve the peak signal-to-noise ratio and structural similarity on four benchmark datasets while reducing the number of parameters. In particular, on the Set5 dataset, compared with DID-D5, the peak signal-to-noise ratio of 4× super-resolution increases by 0.08 dB and the reconstructed image has better visual effects and richer feature information, thus confirming the effectiveness of the proposed algorithm.
Oct. 25, 2022Vol. 30 Issue 20 2489 (2022)

Chuankai MIAO, Shuli LOU, Ting LI, and Huimin CAI
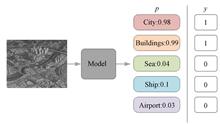
Scene perception and classification of FLIR images is a key technology in target recognition and of great significance to infrared reconnaissance and guidance. To resolve the problem of scene perception and classification of FLIR images, this study proposes a multi-label infrared image classification algorithm based on weakly supervised learning. First, a multi-label image classification technique is applied to FLIR images, and the images of multiple scenes are annotated using weakly supervised techniques. Infrared image features are extracted using the ResNet-50 network with a residual structure. Second, a CSRA module is introduced to capture the different spatial regions occupied by different classes. The CSRA module can improve the feature expression performance and realize the inference calculation of topological relationships between multiple labels. Finally, the advanced loss function ASL is introduced to solve the imbalance of the number of positive and negative labels in multi-label classification. The advanced loss limits the contribution of negative samples to the loss function and focuses attention on the positive samples during training. An experiment shows that the algorithm has good adaptability and accuracy, and the accuracy can exceed 90%. The algorithm can be used to perform multi-label classification with high accuracy and adaptability.
Oct. 25, 2022Vol. 30 Issue 20 2501 (2022)
Yi YANG, Yibo LI, Zhuxi MA, Fengyu CHEN, and Qianbin HUANG
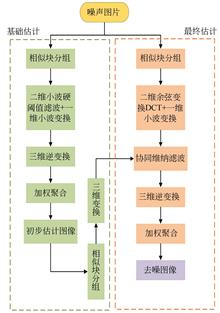
An adaptive block-matching and 3D-filtering denoising (BM3D) algorithm based on noise estimation and a threshold function is proposed to solve the problem of the distance threshold selection of the traditional BM3D algorithm not being adaptive and to improve the image quality by removing noise in steel plate images. First, the grid search method is used to obtain different plate defect images under different noise-intensity-based estimations and the final estimate for the best threshold value. Subsequently, the different function fitting effects are compared, and the estimated quadratic curve threshold function and the final estimate of four polynomial threshold functions are determined. Moreover, noise estimation is performed for the new algorithm processing phase. Finally, the new BM3D algorithm is compared with the original BM3D algorithm and other latest denoising algorithms. Experiments show that the algorithm has excellent performance in restoring the edge and detail textures of defective images. Under noise with a standard deviation of 30, the peak signal-to-noise ratio and structural similarity value of the denoising effect of each defective image are above 33 dB and 0.85, respectively. Moreover, the residual details in the residual image are reduced and are better than those achieved by applying other algorithms.
Oct. 25, 2022Vol. 30 Issue 20 2510 (2022)
Qingzhu LI, Zhining LI, Zhiyong SHI, and Hongbo FAN
To achieve synchronous positioning of multi-target magnetic dipoles with different locations, moments, and buried depths, a multi-target positioning method based on adaptive fuzzy c-means (AFCM) clustering and tensor invariants is proposed. First, based on the 2D plane grid measurement of a magnetic gradient tensor system, the target distribution area is pre-identified by using the improved tilt angle with the invariants of normalized source strength and tensor contraction. Subsequently, the tensor-derivative invariant-relation positioning method is applied to calculate the initial coordinate points of the magnetic dipoles at grid nodes in the recognition area; these points form a dense point cloud around the real position space of the magnetic source. Finally, the AFCM clustering algorithm is employed to perform 3D clustering on these point clouds of initial position solutions and automatically detect the number of cluster centroids. The estimated number of cluster centroids is the number of targets, and the cluster centroids are the target position coordinates. Then, the tensor matrix and position vector can be used to calculate the magnetic dipole moment. Simulations show that in a Gaussian noise environment with a variance of 5 nT/m, the target-number estimation accuracy of 20 magnetic dipole targets is 100%, horizontal-position estimation accuracy is greater than 91.7%, and buried-depth estimation accuracy is greater than 85.6%. Measurements reveal that the coordinate deviation of the small magnets in the measuring areas of 2.1 m × 2.1 m and 1.2 m × 1.2 m is less than 0.091 m.
Oct. 25, 2022Vol. 30 Issue 20 2523 (2022)

Rui ZHOU, Yanfang LIU, Naiming QI, and Jiayu SHE
With the development of artificial intelligence, target recognition and pose estimation based on computer vision have received widespread attention. At present, computer-vision-based pose estimation technology for cooperative targets is being widely used in space missions, such as in rendezvous and docking. However, for noncooperative targets, complex environments, such as stray-light backgrounds, surface-coating reflections, and dramatic light changes, cause difficulties in feature extraction and pose estimation. In this paper, the methods and applications of visual-based pose estimation in space missions are summarized. Various target recognition and pose estimation algorithms, based on deep-learning algorithms, are systematically outlined. Moreover, current deep-learning algorithms in the context of space missions are discussed. Finally, the task demand of space tasks is analyzed to present some future development trends.
Oct. 25, 2022Vol. 30 Issue 20 2538 (2022)

Jiaolong ZHANG, Yiheng LIU, Haoyu XING, He HUANG, and Jianguo GUO
In order to solve the problem that the CubeSat solar wing cannot be verified by multiple ground unlocking tests under strict dimensional constraints, a lightweight and high stiffness solar wing with repeatable electromagnetic unlocking mechanism is proposed. Firstly, a micro hinged deployment mechanism with the functions of deployment, locking and in-position indication is proposed. Secondly, the proposed electromagnet unlocking mechanism solves the problem that the compression release device cannot be unlocked repeatedly. Meanwhile, it has the advantages of low impact, no pollution and rapid response. Finally, the sensitivity analysis and optimization are performed after the dimensional configuration and auxiliary support layout of the solar wing. The simulation results indicate that the weight of the solar wing is reduced by 20%, and the fundamental frequency in the unfolded state is raised by 16%, which meet the requirements of light weight and high stiffness. The ground qualification level vibration, shock response spectrum, thermal vacuum test and on-orbit flight verification of the BY-03 satellite are carried out, which show this solar wing meets the application requirements. This concept can be used as a reference for design and development of CubaSat solar wing.
Oct. 25, 2022Vol. 30 Issue 20 2446 (2022)
Xiangwen CHEN, and Haitao LI
To realize high-precision speed tracking control of the gimbal system with harmonic drive, a feedforward compensation method based on the iterative learning control of the position domain is proposed. First, the periodicity characteristics of the load angular speed fluctuation in the position domain, which is caused by the kinematic error of the harmonic drive, are analyzed. According to the analysis results, an iteration compensation method of the position domain is proposed. This method obtains the feedforward compensation signal by accumulating the speed adjustment error signal. The compensation signal compensates the torque to suppress the speed fluctuation. Then, the convergence and iteration termination conditions are obtained by the analysis of the iterative learning algorithm. Finally, the effectiveness and feasibility of the proposed method were verified with simulations and experiments. The results show that the proposed iterative learning feedforward compensation method suppresses the load angular speed fluctuation of the gimbal system by more than 30%. The proposed method is simple to implement and has good velocity fluctuation suppression. Simultaneously, the output torque of the control moment gyro is effectively improved.
Oct. 25, 2022Vol. 30 Issue 20 2457 (2022)
Cong ZHANG, Wenzheng LIU, Fajie DUAN, Xiao FU, and Xinxing WANG
To improve the straightness accuracy during the five-degree-of-freedom measurement (5DOFM) of long guide, the measurement light path, error model, and calibration method of the straightness measurement unit in the 5DOFM device were examined. During long distance measurement, the angle drift of the reference beam causes severe straightness error. Accordingly, a telescopic objective lens structure was adopted to measure the angle drift in the optical path. Compared with a single lens, the focal length can be increased in a limited space, such that the combined focal length is larger than the mechanical size, thereby improving the measurement accuracy, and compensating for the angle drift to improve the measurement stability. Additionally, the error introduced by angle crosstalk was analyzed, and a compensation model was established based on the angle measurement value in the device. A four-quadrant detector was used as the straightness measurement sensor. To solve the problems that the nonlinearity of the sensor increases as the range increases, and the sensitivity changes nonlinearly with the movement of the long guide, an interval calibration method combining polynomial fitting and cubic spline interpolation fitting was proposed. The experimental results showed that within the 5-m measurement distance and ±400-μm range, the error standard deviation was less than 0.3 μm compared with the measurement results of the laser interferometer, and the drift was less than ±0.5 μm within 3 h. Thus, the straightness measurement unit meets the requirements of large range, high precision, and high stability of long guide straightness measurement.
Oct. 25, 2022Vol. 30 Issue 20 2467 (2022)
Changxin YU, Yanlin HE, Chaojiang HE, Hangwei ZHU, and Lianqing ZHU
The end-force measurement of minimally invasive surgical puncture probes is crucial for achieving precise control of such probes, improving the quality of surgeries, and ensuring the safety of surgical operations. In this study, a fiber optic force sensor with a Fabry-Pérot (F-P)-cavity-cascaded fiber Bragg grating (FBG) that can be integrated into the probe is designed to meet the actual requirements for measuring the force at the end of a puncture surgical probe. First, based on the double-beam interference theory of the F-P cavity and fiber grating sensing theory combined with the cantilever beam structure of the probe, the F-P cavity and FBG of the fiber optic sensor implanted in the probe sensing model are analyzed. Then, the mapping relationship between the characteristic wavelength shift of the F-P cavity and the FBG and the applied force are deduced, with the force and temperature sensitivity matrix being introduced to realize the probe force measurement while effectively avoiding the cross-influence problem of temperature. Next, the optical-fiber F-P-cavity parallel-cascade FBG constitution sensor is prepared by employing chemical corrosion, and the sensor is integrated into the surgical probe. Finally, to calibrate and verify the F-P-cavity-cascaded FBG fiber optic force sensor, the force and temperature sensitivity and the stability of the sensor are experimentally tested. The experimental results show that the force sensitivity of the fiber F-P cavity of the sensor can reach 331.8 pm/N, FBG force sensitivity can reach 159.9 pm/N, linearity is >0.99, and average wavelength shift is 2.5 pm. The probe force sensor designed in this study has high sensitivity and good linearity, thus exhibiting broad application prospects in the field of minimally invasive surgical puncture robots.
Oct. 25, 2022Vol. 30 Issue 20 2421 (2022)
Hangzhou DONG, Tingwu GE, Wei LIU, Yu FAN, and Zhuocheng TIAN
To meet the application requirements of photoelectric countermeasures, hyperspectral lidar, and optical coherence tomography, among others, nIR supercontinuum output with high flatness must be obtained and the effect the backwardness of light enhancement on the stability of a laser system during nonlinear amplification should be prevented. The experiment employed a picosecond pulse laser seed source with nonlinear frequency component, and the laser was built with a fiber nonlinear amplifier to produce supercontinuum output directly, solving the problem of returning light effectively. Using the nonlinear fiber amplifier to generate supercontinuum is an effective way to realize a high-power supercontinuum light source. The method combines the laser gain amplification process with the nonlinear supercontinuum broadening process, achieving simple and compact system structure. The SESAM passive mode-locked picosecond pulse was used to achieve a first-order Stokes frequency broadening through two-stage amplification. Finally, a third-stage nonlinear fiber amplifier was used to realize a near-infrared supercontinuum output power of 56 W at a wavelength range of 950~1650 nm, flatness of 10 dB (excluding pump light), and opto-optical conversion efficiency of 48%.
Oct. 25, 2022Vol. 30 Issue 20 2430 (2022)
Songnian TAN, Yuan YAO, Yulei XU, Yongsen XU, and Hao LI
To ensure the imaging effectiveness of an aerial camera, an airtight optical window and a protector are designed in this study. The design process for the optical window is analyzed. Considerations, such as optical materials, optical thickness, pressure, and air-tight installation options, for the design of optical windows are discussed. To ensure that the optical window remains protected in the non-working state, a light window protector with a double hatch structure is designed to miniaturize the system. The stability of the airtight optical window and light window protector is tested by conducting simulation analysis and experiments. The system can work appropriately and exhibit good performance under an atmospheric pressure of 2 and in high- and low-temperature environments. The overall thickness of the optical window protector is 37 mm. The one-way time is 7.7 s, indicating a small opening or closing interval. The related analysis method ensures that the optical window design process is guided and makes the optical window design process more effective and reliable. The scheme proposed in this study provides a reference and technical support for the design and protection of aerial camera optical windows.
Oct. 25, 2022Vol. 30 Issue 20 2436 (2022)
© Copyright 2018-2021 | Chinese Laser Press.
All Rights Reserved 沪ICP备15018463号-20