




 View fulltext
View fulltext

2022
Volume: 30 Issue 19
10 Article(s)

Yinbo ZHANG, Haoyang LI, Jianfeng SUN, Sining LI, Peng JIANG, Yue HOU, and Hailong ZHANG
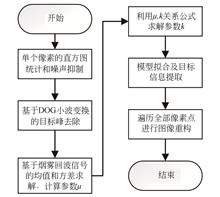
When Geiger mode avalanche photo diode (Gm-APD) lidar is used to image targets obscured by dense smoke, the strong backscattering and absorption of laser light by the smoke severely limit the ability of traditional algorithms in extracting the target signal hidden in the smoke signal. To this end, we propose a Gm-APD lidar imaging algorithm based on dual-parameter estimation for imaging in smoke environments. First, this paper introduces a trigger model based on Gm-APD lidar and describes the principle for solving the actual received echo signal based on the detection probability. In addition, based on the collision theory of photons and smoke particles, as well as the Mie scattering theory, the physical relationship between the two parameters of the gamma model is derived. Second, a dual-parameter estimation algorithm is proposed based on the derived relationship, which considers approaches to accurately estimate μ and k. Finally, simulation and indoor experiments are conducted. The correctness of the relationship between μ and k is verified based on these simulation experiments, and the imaging ability of the proposed algorithm in the presence of smoke is verified through indoor experiments. The experimental results reveal that compared with traditional algorithms, the target recovery of the image reconstructed by the proposed algorithm increases by 73%, and the structural similarity increases by 0.228 9. Thus, this study effectively improves the target perception ability of Gm-APD lidar in smoke environments.
Oct. 10, 2022Vol. 30 Issue 19 2370 (2022)
Jingang LIN, Dongnian LI, Chengjun CHEN, and Zhengxu ZHAO
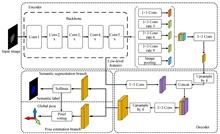
Global hand pose estimation under changing gestures remains a challenging task in computer vision. To address the problem of large errors in this task, a method based on pixel voting was proposed. First, a convolutional neural network with an encoder-decoder structure was established to generate feature maps of semantic and pose information. Second, hand pixel positions and pixel-by-pixel pose voting were obtained from the feature maps using semantic segmentation and pose estimation branches, respectively. Finally, the pose voting of hand pixels was aggregated to obtain the voting result. Simultaneously, to solve the problem of scarcity of global hand pose datasets, a procedure for generating synthetic datasets of the human hand was established using the OpenSceneGraph 3D rendering engine and a 3D human hand model. This procedure could generate depth images and global pose labels of human hands under different gestures. Experimental results show that the average error of global hand pose estimation based on pixel voting is 5.036°, thus verifying that the proposed method can robustly and accurately estimate global hand poses from depth images.
Oct. 10, 2022Vol. 30 Issue 19 2379 (2022)
Shuai HAO, Tian HE, Xu MA, Lei YANG, and Siya SUN
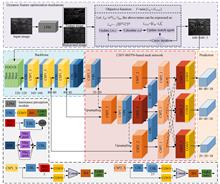
Multi-scale and partial occlusions in infrared pedestrian images for target detection make it difficult for traditional algorithms to achieve accurate detection. This study developed a cross-scale infrared pedestrian detection algorithm based on a dynamic feature optimization mechanism. First, to alleviate the limitation that pedestrian target features are difficult to express effectively in complex environments, which results in low target detection accuracy, a dynamic feature optimization mechanism is presented. The luminance perception module and EG-Chimp optimization model are designed to enhance the local contrast of the input image and suppress background information. Second, the CSPdarknet53 structure is utilized as the backbone feature extraction network. Accordingly, a CSFF-BiFPN feature pyramid structure and cross-scale feature fusion module are constructed to improve the detection accuracy of multi-scale and partially occluded pedestrian targets. Finally, the CIOU loss function is introduced to accelerate network convergence rate and improve detection performance to locate pedestrian targets more accurately. To verify the advantages of the proposed detection network, nine classical detection algorithms are selected as baseline methods and tested on KAIST datasets. Experimental results demonstrate that the proposed algorithm can accurately detect multi-scale and partially occluded infrared pedestrian targets in complex environments, with detection accuracies of up to 90.7 %.
Oct. 10, 2022Vol. 30 Issue 19 2390 (2022)
Jie WANG, Guoming XU, Jian MA, Yong WANG, and Yi LI
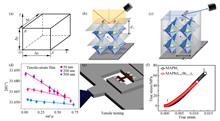
The new polarization computational imaging method in deep learning mode leads to higher computational complexity and memory usage as the network depth increases and results in insufficient hierarchical feature extraction. To this end, a lightweight polarization computational imaging super-resolution network with cascade attention is proposed that requires fewer parameters and a lower computational complexity while ensuring the reconstruction accuracy. First, cascade and fusion connections are used to deepen the representational capabilities of the convolution layers to effectively transfer shallow features and reduce the number of parameters. Second, a spatial attention adaptive weighting mechanism is designed to extract polarized multi-parameter spatial content features. A spatial pyramid network is then constructed to enhance the polarization feature information under multiple receptive fields. An upsampling module introduces the shallow and deep reconstruction paths and generates high-resolution polarization images by fusing the features of the two-layer paths. Finally, the network end information refines the blocks to learn finer features and enhance the reconstruction quality. Experiments show that the texture details of the reconstructed images using the proposed method are more abundant. The peak signal-to-noise ratio (PSNR) of two-times super-resolution on the full polarized image set is 45.12 dB, and the number of parameters is approximately 9% of that for a multi-scale residual network (MSRN). The proposed method effectively captures low-frequency feature information in a cascading manner while significantly reducing the number of parameters. Combined with the attention pyramid structure to explore deep features, an efficient super-resolution reconstruction is realized using a lightweight network.
Oct. 10, 2022Vol. 30 Issue 19 2404 (2022)

Jieda CHEN, Dongdong LI, Xufei ZHU, and Shanting ZHANG
Among flexible photovoltaic technologies, flexible perovskite solar cells have emerged as the most attractive and promising technology because of their flexibility, low weight, low cost, and high power conversion efficiency. However, flexible perovskite solar cells have limited mechanical robustness. This issue is related to the use of rigid electrode and perovskite thin films and the large difference in the coefficient of thermal expansion between different layers. The mechanical stability of flexible perovskite solar cells must be further improved to promote the commercialization of these batteries. This paper reviewed recently published studies focusing on improving the flexibility of substrates, electrode, perovskite thin films, and interfaces. Accordingly, the main effective strategies to improve the mechanical robustness of flexible perovskite solar cells was summarized. Finally, we have briefly outlined potential development directions for highly efficient and flexible perovskite solar cells.
Oct. 10, 2022Vol. 30 Issue 19 2332 (2022)
Xiaodong WANG, Zhongyang YU, Zheng XU, Shiqin LU, and Shipeng CUI
Owing to diversification assembly states in batch assembly, feature positioning errors, which severely interrupt the process and affect the efficiency, are easily caused. Therefore, establishing a strong robust feature localization algorithm is essential. This paper proposes a support vector machine model that synthesizes gradient histograms and local binary patterns. The pyramid search strategy is utilized to improve the recognition efficiency and develop a micro-feature localization method. Both performance verification and heuristic applications are performed on self-developed precision automatic assembly equipment, and different features are recorded for support vector machine training. The influences of interference factors, such as texture and illumination, on the positioning stability are investigated in detail. Additional experiments on the positioning accuracy and actuator component assembly are performed. The results reveal that the proposed approach exhibits good unimodal, repetitive accuracy and robustness under various conditions. The recognition accuracy rate can reach 98%. Its positioning accuracy is better than 4 μm, and the actual assembly accuracy is better than 7 μm. The feature localization method can meet localization requirements under different assembly conditions in actual batch production and provides an effective solution for precision automatic assembly localization.
Oct. 10, 2022Vol. 30 Issue 19 2353 (2022)

Yang ZHAO, and Qiangxian HUANG
When tapping mode atomic force microscopy (AFM) is operated in air, the distance between the cantilever and the sample is so small that cantilever oscillation induces squeeze film air damping in the gap. This study aims to model and analyze the effects of squeeze film damping by using the Euler-Bernoulli and Reynolds equations. Theoretical analysis shows that squeeze film damping can decrease the damping coefficient depending on the distance between the cantilever and the sample and the cantilever width. Then, resonant amplitude and quality factor (Q) of the cantilever in multi-mode AFM are tested. Experimental results show that the Q of the fundamental resonant cantilever decreases obviously. The amplitudes of two cantilevers with widths of 20-2 μm decrease by 7.8% and 20.6%. Squeeze film damping can affect the cantilever with a large width to a greater extent than the cantilever with a small width. This phenomenon can also influence AFM dynamic characteristics; in particular, it can decrease flexural sensitivity and scanning speed. However, this phenomenon can only slightly affect the Q and amplitude of the cantilever. The impact of squeeze film damping of the cantilever is significantly reduced when AFM is operated in a higher-order resonant mode.
Oct. 10, 2022Vol. 30 Issue 19 2362 (2022)
Xuemei YANG, Rui ZHANG, Jin SHI, Qiong WU, Weihao DU, Zhibin WANG, and Mengwei LI
To realized laser-warning systems for high-precision detection with a broadband and large field of view, a wide field two-dimensional laser-warning detection system was presented based on broadband black-white grating diffraction. In addition, an optical system comprising a broadband black-white grating and large field-of-view lens was designed. A five-group seven-element combined lens structure was applied to achieve the large field-of-view detection with an azimuth angle of 95° and a pitch angle of 72°. The lens aperture was 2.0, and the pupil diameter was 36 mm. These values ensured that the system exhibited a considerable amount of light transmission.Furthermore, a broadband black-white grating with a grating constant of 2.5 μm (and duty cycle of 0.6) was designed and processed, with broadband detection performed from 0.5-1.7 μm. Moreover, a multi-narrowband filter is added to the system to filter out background-light interference. Finally, testing with lasers of typical wavelengths (532, 1 064, and 1 550 nm), the angle error achieved by the system is better than 0.7°, the laser center wavelength detection accuracy is better than 8 nm, thus verifying the feasibility of the method experimentally.
Oct. 10, 2022Vol. 30 Issue 19 2295 (2022)
Guosheng MA, Ying LIU, Hao DENG, Zhenyu XU, Yabai HE, and Ruifeng KAN
To meet the requirements of high-sensitivity detection of CH4, a greenhouse gas, this study developed a high-finesse optical feedback cavity ring-down spectroscopy technique. The influence of optical feedback on the cavity mode signal, the sensitivity of the system, and the method of spectral scanning were mainly studied. First, the optical feedback cavity ring-down spectroscopy technique was realized on a V-shaped resonator with a finesse greater than 100 000, and the difference between the cavity mode signal with and without optical feedback was compared, verifying that the optical feedback effect can improve the coupling between the laser and cavity. Second, an optical feedback detection technique with a fixed cavity length was developed, and the free spectral range (FSR) of the cavity was used as a spectral relative frequency scale. Based on a comparative analysis of the absolute wavelengths and measured relative positions of the two absorption lines in the HITRAN database, the FSR of the cavity was obtained as 0.004 2 cm-1. Then, the detection capability of the system was analyzed using Allan variance, and the noise equivalent absorption coefficient of the system was measured to be 1.1×10-10 cm-1 Hz-1/2. When the integration time was 4.7 s, the sensitivity of the system was 8×10-11 cm-1. Finally, a laser frequency-controlled scanning method with continuous voltage scanning was proposed. The method was verified with a standard gas of 1.5×10-6 and a measurement accuracy of 6.8×10-9. This method has great potential for instrument engineering.
Oct. 10, 2022Vol. 30 Issue 19 2305 (2022)
Aoling LI, Huigao DUAN, Honghui JIA, Jianhua LI, and Yueqiang HU
Mid-infrared imaging devices, especially those operating in the atmospheric window (3-5 μm and 8-12 μm), have important applications in infrared imaging and detection. Traditional mid-infrared imaging devices are usually bulky, expensive and complicated, which hinder the development of lightweight and integration in the future. The metalens, which are composed of subwavelength micro-nano structures arrayed in a periodic or aperiodic manner, have the characteristics of thinness, easy of integration and multi-functionality, providing new possibilities for future miniaturization needs. In this paper, the research progress of metalens in the mid-infrared band is reviewed, then the basic phase control methods of the metalens and its mechanism for achieving high focusing efficiency, eliminating chromatic aberration and monochromatic aberration in the mid-infrared band are introduced. Moreover, this paper sort out the imaging applications of mid-infrared metalens, including polarization dependent imaging, tunable and reconfigurable imaging and other imaging applications. Finally, the challenges and future prospects of this emerging field are discussed.
Oct. 10, 2022Vol. 30 Issue 19 2313 (2022)
© Copyright 2018-2021 | Chinese Laser Press.
All Rights Reserved 沪ICP备15018463号-20