




 View fulltext
View fulltext

2022
Volume: 30 Issue 16
10 Article(s)

Wen HAO, Wenjing ZHANG, Wei LIANG, Zhaolin XIAO, and Haiyan JIN
Intelligent robots can perform several high-risk tasks such as object detection and epidemic prevention to aid human beings. Research on scene recognition has attracted considerable attention in recent years. Scene recognition aims to obtain high-level semantic features and infer the location of a scene, laying a good foundation for simultaneous localization and mapping, autonomous driving, intelligent robotics, and loop detection. With the rapid development of 3D scanning technology, obtaining point clouds of various scenes using various scanners is extremely convenient. Compared with images, the geometric features of point clouds are invariant to drastic lighting and time changes, thus making the process of localization robust. Therefore, scene recognition of point clouds is one of the most important and fundamental research topics in computer vision. This paper systematically expounds the progress and current situation of scene recognition techniques of point clouds, including traditional methods and deep learning methods. Then, several public datasets for scene recognition are introduced in detail. The recognition rates of various algorithms are summarized. Finally, we note the challenges and future research directions of the scene recognition of point clouds. This study will help researchers in related fields to better understand the research status of scene recognition of point clouds quickly and comprehensively and lay a foundation for a further improvement in the recognition accuracy.
Aug. 25, 2022Vol. 30 Issue 16 1988 (2022)
Shengjun XU, Ruoxuan ZHANG, Yuebo MENG, Guanghui LIU, and Jiuqiang HAN
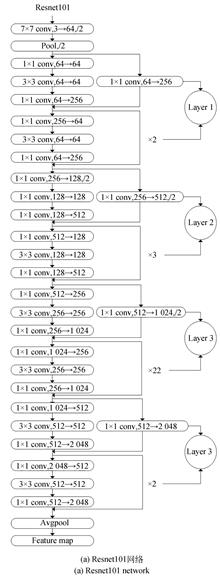
In remote sensing images, roads, trees, and shadows in the background easily interfere with buildings; this usually leads to unclear segmentation boundaries. To address this issue, a Resnet network integrating fractal geometry features is proposed. Based on the coding–decoding framework and considering the Resnet network as a backbone network, the proposed algorithm introduces an atrous spatial pyramid pooling module (FD-ASPP) integrating fractal a priori in the coding stage, which can use the fractal dimension to capture the fractal features of remote sensing images and enhance the geometric feature description ability of the Resnet network. In the decoding stage, a deep separable convolution attention fusion mechanism (DSCAF) is proposed to effectively integrate high-level and low-level features to obtain richer semantic information and location details of remote sensing images. Experiments on the WHU remote sensing image dataset show that the accuracy precision rate is 0.944 8, the recall rate is 0.946 2, the F1 score is 0.945 5, and the average cross merge ratio mIoU is 0.941 5. Compared with existing remote sensing semantic segmentation algorithms for buildings, such as FCN, Segnet, Deeplab V3, U-net, SETR, and AlignSeg, the proposed method achieves better segmentation accuracy; effectively overcomes the interference of roads, trees, shadows and other factors; and obtains a clearer building boundary.
Aug. 25, 2022Vol. 30 Issue 16 2006 (2022)
Liming LIANG, Longsong ZHOU, Jun FENG, Xiaoqi SHENG, and Jian WU
To address problems in foreign object occlusion, a lack of feature information, and the incorrect segmentation of lesion areas during skin lesion image segmentation, a skin lesion segmentation method based on a high-resolution composite network is proposed. First, we use a preprocessing operation to refine and expand the skin lesion image to reduce the impact of foreign object occlusion on the network segmentation performance. Subsequently, we use a high-resolution network and multi-scale dense module to construct the encoding part. The high-resolution network can ensure the global transmission of high-definition feature maps, and the multi-scale dense module can maximize the transmission of lesion features, reduce the loss of image feature information, and accurately locate skin lesion areas. Next, we use a reverse high-resolution network and double residual module to construct the decoding part. The double residual module can capture deep semantic information and spatial information when reconstructing decoding features and improve the segmentation accuracy of skin lesions images. Experiments are performed on the ISBI2016, ISBI2017, and ISIC2018 datasets, whereby the obtained accuracies are 96.14 %, 93.72 %, and 95.73 %, respectively; the Dice similarity coefficients are 93.16 %, 88.56 %, and 92.00 %, respectively; and the Jaccard indices are 87.01 %, 77.19 %, and 85.19 %, respectively, and the overall performance of the segmentation method is superior to existing methods. Simulation experiments reveal that the high-resolution composite network demonstrates a superior segmentation effect on skin lesions images, which opens new avenues for the diagnosis of skin diseases.
Aug. 25, 2022Vol. 30 Issue 16 2021 (2022)

Liwei XUE, Xiong WANG, Yudie JIA, Hao SHEN, and Liguo CHEN
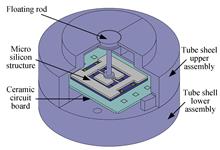
Friction sensors are three-dimensional MEMS sensors specifically designed for measuring the surface friction of hypersonic vehicle models. In order to realize its reliable assembly, a MEMS friction sensor micro assembly system is designed, including a double micro vision system, high-precision fixture design, precision operation tools, precision positioning platform, high-precision visual recognition algorithm, and dispensing process. First, an analysis of the system reveals that the influence on the performance of the sensor is related to the geometric tolerance of the floating rod and chip assembly of the sensor, the concentricity between the upper circular surface of the floating rod and the circular hole of the upper cover of the sensor after the assembly, and the flush of the end face is related to the height difference. Then, according to the influencing factors, a high-precision fixture is designed to ensure that the geometric tolerance of each component of the sensor before assembly is within the theoretical range. Moreover, a precision operation tool is designed to ensure the accurate absorption of components and the stability of handling components in the assembly process, the shaft hole position of the positioning assembly is accurately identified using double micro vision, and the precision positioning platform is driven to transport each component to the corresponding assembly position. Finally, the influence of the dispensing process on the performance of the sensor assembly is investigated. The experimental results reveal that following the sensor assembly, the average concentricity deviation between the floating head and the circular hole of the upper end cover is 4.90 μm. The runout value of the height difference between the floating head and the end face of the upper end cap is 1 μm. The friction sensor micro-assembly system fully meets the requirements of the friction sensor assembly.
Aug. 25, 2022Vol. 30 Issue 16 1943 (2022)
Guanbin GAO, Jinpeng NIU, Fei LIU, and Jing NA
The positioning accuracy of multi-joint robots is much lower than the repetition accuracy. Currently, kinematic calibration and spatial error compensation are the primary techniques adopted to improve robot positioning accuracy. In spatial error compensation, inverse distance weighting is typically used to predict the error of a positioning point. However, as a single weight, the inverse distance cannot accurately represent the influence of each grid point because the weight is too average, resulting in a poor compensation result. To improve the positioning accuracy of robots, a positioning prediction and compensation method, including distance and orientation, is proposed based on error similarity. First, a positioning error model is derived from the kinematic model using differential kinematic theory, and then, the relationship between joint angles and the positioning error is analyzed. The robot workspace is divided into a grid of several cubes, and the effect of the direction of the positioning point relative to the reference point on error similarity is investigated. The error transfer function is then derived using the cosine of the included angle and the distance as the error transfer factor. Second, a method for anisotropic similarity modeling and error compensation is proposed based on an error transfer function that uses the error of reference points to calculate the error of the positioning point. The proposed method is verified through experiments and compared with the traditional inverse distance weighting method. After compensation, the maximum and average positioning errors of the robot decrease significantly along all directions, as demonstrated by the experimental results. The maximum and average errors along x-, y-, and z-directions decrease from 1.03 mm and 0.30 mm to 0.11 mm and 0.04 mm, respectively. Furthermore, the proposed method provides greater compensation accuracy than the traditional inverse distance weighting method.
Aug. 25, 2022Vol. 30 Issue 16 1955 (2022)

Junzhong LI, Xiaobo LIAO, Shilin XU, Jian ZHUANG, and Yong CAI
In this study, we designed a piezoresistive cantilever beam structure bionic cilia micro flow sensor to address the problem of difficult and low-accuracy micro fluid flow measurement. First, we compared and analyzed the advantages and disadvantages of existing hot-wire, piezoelectric, and piezoresistive micro flow sensors. Then, we designed a cantilever beam structure micro flow sensor based on the piezoresistive principle, given the superior linearity between the strain and the resistance value of the piezoresistive sensor. Second, parameters such as the optimal array size, diameter, height, and cantilever beam length of the bionic cilia were determined using finite-element numerical analysis. Then, the meniscus-confined electrodeposition method was used to prepare bionic cilia arrays and to fabricate the micro flow sensor. Finally, the experimental results were obtained in a self-made device; they demonstrate that the sensor can accurately sense and measure flow velocities that exceed 0.4 m/s with a nonlinear error of 2.84%. The results indicate that the proposed bionic cilia strain gauge flow sensor has a wide range of applications in micro flow measurement.
Aug. 25, 2022Vol. 30 Issue 16 1968 (2022)

Hongtao YANG, Yueqi LIU, Jingjing CHENG, Mei SHEN, and Yi HU
To improve the measurement accuracy and efficiency of self-driven arm-articulated coordinate measuring machines (AACMMs), a trajectory optimization method based on the particle swarm optimization algorithm is proposed to solve the online trajectory optimization problem of AACMMs. First, the forward kinematics model of the measuring machine is established using the MDH parameter method, and mixed trajectory planning is performed via S-shape addition and subtraction and uniform linear interpolation. Second, particle swarm optimization is used to optimize the trajectory by considering the operating time and motion stability as the optimization objectives. Finally, a measuring machine model is established using MATLAB and ADAMS to analyze a standard ball measurement numerically. The standard ball measurement is performed using a prototype of the measuring machine. The results reveal that the hybrid trajectory planning optimization method based on the particle swarm optimization algorithm can ensure the smooth operation of the measuring machine. Additionally, the measuring time of the standard ball is reduced from 62.91 to 57.35 s, and the measuring radius error of the standard ball is reduced from 0.057 1 to 0.042 3 mm. Hence, the trajectory optimization method can effectively reduce probe vibrations and improve the measurement accuracy and efficiency of the measuring machine.
Aug. 25, 2022Vol. 30 Issue 16 1978 (2022)
Yang WANG, and Li YANG
Rotating machineries are core components of mechanical equipment, and faults in such machineries can cause significant losses; thus, the real-time monitoring and diagnosis of rotating machinery are highly necessary. Therefore, we study the monitoring and diagnosis of rotating machinery and propose an infrared intelligent diagnosis method for rotating machinery based on deep learning. In this study, we develop a rotating machinery fault simulation test-bed, with three preset motor states: normal, overloaded, and short-circuited and three rotor system states: normal, imbalanced, and misaligned. The surface temperature of the rotating machinery is recorded using an infrared thermal imager, followed by infrared imaging and enhancement. A target detection algorithm is used to identify and locate the rotating machinery parts in the image, and an infrared image of the part is reconstructed according to the detection results. Finally, an image classification algorithm is used to classify the two types of components, thus achieving intelligent fault diagnosis. The experimental results reveal that the accuracy of the intelligent fault diagnosis for rotating machinery is 90.06 %, and a good intelligent diagnosis effect can be realized. In addition, after the expansion of component and fault types, the method and process may be used as a reference for rotating machinery fault diagnosis and even mechanical fault diagnosis.
Aug. 25, 2022Vol. 30 Issue 16 1905 (2022)
Jianhua ZHU, Ping RONG, Shuai REN, Xinyu GUO, and Shiyong GAO
In order to obtain a ZnO-based broadband photodetector with a multi-band response, ZnO is coupled with other narrow-bandgap semiconductors to construct the heterojunction. In this study, ZnO nanorods (NRs) arrays were first grown on FTO substrates through the hydrothermal process. Then, Bi2S3 quantum dots (QDs) were synthesized on the surface of ZnO NRs via the successive ionic layer absorption reaction method, thereby successfully constructing the ZnO NRs/Bi2S3 QDs heterojunction. The micro-morphology and elemental composition of as-prepared samples were characterized using a scanning electron microscope and energy dispersive spectrometer. The results show that the Bi2S3 QDs are uniformly and densely attached to the surface of ZnO NRs that are slightly curved and partially intertwined at the top. Then, a broadband photodetector was fabricated based on the as-prepared heterojunction. In addition, the photodetector based on the ZnO NRs/Bi2S3 QDs heterojunction can operate without an external power source, indicating that the photodetector has a self-powered feature. Compared with the ZnO NRs photodetector, the maximum photocurrent of the ZnO NRs/Bi2S3 QDs photodetector under UV light irradiation increases by approximately 0.065 mA. This is mainly because the type II band alignment between ZnO and Bi2S3 increases the separation efficiency of photogenerated charge carriers. Furthermore, the ZnO NRs/Bi2S3 QDs photodetector has excellent detection capability for visible light, exhibiting excellent cycle stability when irradiated by blue (470 nm) and green light (530 nm).
Aug. 25, 2022Vol. 30 Issue 16 1915 (2022)
Jie TAN, Shibin LIU, Jiezhang LUO, Yinghao CHEN, and Yongqian Du
As a potential semiconductor field-effect sensor, the light-addressable potentiometric sensor (LAPS) has advantages such as high sensitivity, low cost, and simple fabrication. Further, it has become a crucial tool for label-free biochemical detection and visualization analysis of two-dimensional biochemical concentration distribution. Due to the presence of trapped charges in the insulator, low photoelectric conversion efficiency of the semiconductor layer, noise interference in the system, and crosstalk between detection signals, the performance of LAPS is limited in terms of sensitivity, linearity, spatial resolution, and measurement speed. Therefore, structural optimization of LAPS helps to improve detection performance. This paper first introduces the principle of LAPS, including the structure and operation principle of the sensor, measurement system based on the LAPS, and the measurement mode of LAPS. Further, this paper analyzes the optimization progress and related application of LAPS in structure. Finally, this paper summarizes the main points regarding the optimization of LAPS structure for improved detection performance and highlights the breakthrough points and key points for future research.
Aug. 25, 2022Vol. 30 Issue 16 1924 (2022)
© Copyright 2018-2021 | Chinese Laser Press.
All Rights Reserved 沪ICP备15018463号-20