




 View fulltext
View fulltext

2021
Volume: 29 Issue 12
21 Article(s)

Hua-yang SAI, Zhen-bang XU, Shuai HE, En-yang ZHANG, and Chao QIN
To minimize system uncertainty and external disturbance in attitude tracking control for rigid spacecraft, a predefined-time sliding mode controller (PTSMC) is proposed. First, the spacecraft attitude tracking system is developed with quaternion parameterization, and the predefined time sliding surface is designed using an error quaternion and error angular velocity. Then, considering the uncertainties and external disturbances of the spacecraft system, a PTSMC with a non conservative upper bound is designed, and the noise of the system is reduced using boundary layer technology. Finally, by designing the Lyapunov function, the predefined-time stability of the proposed controller and the non conservative upper bound of the system convergence are demonstrated. The simulation results show that using the proposed approach, the attitude tracking accuracy of rigid spacecraft can reach 1.5×10-6 rad, and the angular velocity tracking accuracy can reach 2×10-6 rad/s. Compared with the existing predefined time control and non singular terminal sliding mode control, the upper bound of the stabilization time of the proposed control is more non conservative and has higher tracking accuracy and robustness. The effectiveness of the control scheme is further illustrated by the attitude tracking experiment of the 3 DOF airborne platform. The angle tracking error is less than 0.1 rad, and the position tracking error is less than 0.2 m.
Dec. 15, 2021Vol. 29 Issue 12 2891 (2021)
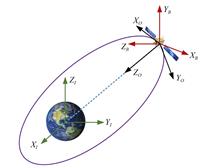
Ju-bo ZHAO, Ting-ting XU, Xiu-bin YANG, and Qiang YONG
Based on the principle of celestial positioning, a stereo positioning method with two observatory satellites was proposed to improve the accuracy of space based detection and positioning. First, according to the performance of the optical camera, the image characteristics of the space target on the optical sensor were analyzed, and the position of the target on the image plane was accurately extracted using the threshold centroid method. Next, based on the coordinate transformation matrix between the target and the observation sensor, the observation vector model was established via the inertial coordinate system. Then, the stereo geometric positioning model of the two observation satellites was established based on the principle of least squares. This model realizes the position transformation of the space target from the two-dimensional image to the three-dimensional space. Finally, the experimental star image capturing the target was generated using ground experiment, and error simulations were performed to verify the positioning algorithm. Simulation results indicate that the positioning precision of the proposed approach can reach 10-5 m in the absence of errors. When five types of errors, satellite orbit and attitude, camera installation, and centroid extraction, were considered, the positioning error obeyed a normal distribution with a standard deviation of 114.62 m and a mean value of 0, thereby meeting the standard requirements. In this regard, this study provides a novel method for the space based high precision detection and positioning.
Dec. 15, 2021Vol. 29 Issue 12 2902 (2021)

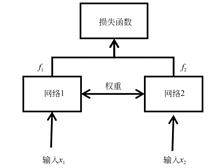
Yun-da SUN, Xue WAN, and Sheng-yang LI
To meet the requirements for precise positioning of spacecraft components during space missions, this paper proposes a spacecraft component tracking algorithm based on a Siamese neural network. The proposed approach solves the common problem of confusing similar components. First, the spacecraft component tracking problem was modeled by training with data via the neural network; the Siamese network was designed by improving the AlexNet network. A large public dataset GOT-10k was used to train the Siamese network. Stochastic gradient descent was then used to optimize the network. Finally, to eliminate the positioning confusion occasioned by the resemblance of similar parts of the spacecraft, a tracking strategy combining motion sequence characteristics was developed to improve the tracking accuracy. The spacecraft video data published by ESA was used to test the proposed algorithm. The experimental results show that the proposed algorithm, without using spacecraft related data for training, achieves 57.2% and 73.1% of the intersection ratio of the tracking results between the cabin and solar panel, and the speed reaches 38 FPS. This demonstrates that the proposed method can meet the requirements of stable and reliable tracking of spacecraft components with high precision and strong anti-interference.
Dec. 15, 2021Vol. 29 Issue 12 2915 (2021)
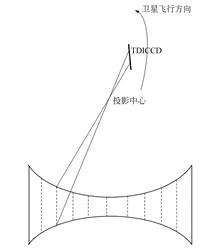
Wu XUE, Peng WANG, and Ling-yu ZHONG
The new linear array circular scanning optical remote sensing satellite has achieved both super large breadth and high resolution through circular scanning perpendicular to the orbit and along the orbit splicing. However, its special imaging mode results in serious geometric distortion of the image, which requires correction. A geometric correction method for linear array circular scanning optical remote sensing satellite images is proposed. Firstly, a strict imaging model of a linear array circular scanning image is constructed based on the scientific analysis of satellite imaging characteristics. Subsequently, the image is preliminarily corrected using image orbit, attitude parameters, and open-source DEM. Finally, several homonymous points are obtained using reference orthophoto image matching as the control points, and the image is accurately corrected using spline function fitting. To verify the effectiveness of the proposed method, experiments are performed using simulated images, and the results show that the accuracy of the proposed method can reach 1 pixel. This method can effectively solve the issue of large geometric distortion of linear array circular scanning satellite images, provide high-precision image products, and has significant application value.
Dec. 15, 2021Vol. 29 Issue 12 2924 (2021)
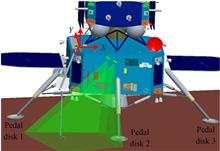
Yan-hong ZHENG, Xiang-jin DENG, Zheng GU, Sheng-yi JIN, and Qing LI
The Chang’E 5 explorer successfully realized China’s first mission of sampling and returning from an extraterrestrial body. Multi-point lunar samples were collected using the surface sampling mode. The process of surface sampling was expounded according to the characteristic of Chang’E 5. The coverage of the monitoring cameras, which were mounted obliquely, was analyzed. Further, a three-dimensional (3D) digital reconstruction workflow adapted for uneven illumination and high similarity texture scene was developed. Considering the layout of the surface sampling manipulator and other surface devices of the lander, the reachable constraint condition of the sampling monition was structured. Moreover, the sampling area, which was visible and reachable, was discussed. Aiming at a class of large-scale samplers, a multi-sampling point selection method combining digital simulation and physical verification was proposed. Subsequently, the proposed method consisting of analysis, simulation, and verification was applied in the Chang’E 5 surface sampling task. An average precision of less than 1 cm was realized for the reconstruction of the physical terrain. Additionally, the sampling points that had circumferential safety spacing greater than 15 cm and longitudinal safety spacing greater than 2 cm were confirmed. The mission results indicated that the sampling points were correct and reliable. The method effectively supported the Chang’E 5' in its surface sampling activities.
Dec. 15, 2021Vol. 29 Issue 12 2935 (2021)
Pei-zhuo LI, Xue WAN, and Sheng-yang LI
In order to enable scientists to quickly locate the key process of the experiment and obtain detailed experimental process information, it is necessary to automatically add descriptive content to space science experiments. Aiming at the problem of small target and small data sample of space science experiment, this paper proposes the image captioning of space science experiment based on multi-modal learning. It is mainly divided into four parts: semantic segmentation model based on improved U-Net, space science experimental vocabulary candidate based on semantic segmentation, general scene image feature vector extraction from bottom-up model and image caption based on multimodal learning. In addition, the dataset of space science experiment is constructed, including semantic masks and image caption annotations. Experimental results demonstrate that: compared with the state-of-the-art image caption model neuraltalk2, the accuracy evaluation of the proposed algorithm is improved by 0.089 for METEOR and 0.174 for SPICE. It solves the difficulty of small objectives and small data samples of space science experiment. It constructs a model of space science experiment image caption based on multi-modal learning, which meets the requirements of describing space science experiment professionally and accurately, and realizes the ability from low-level sense to deep scene understanding.
Dec. 15, 2021Vol. 29 Issue 12 2944 (2021)

Lei XIN, Feng LI, Xiao-tian LU, Zhi-yi ZHAO, and Ji-jin ZHAO
Based on the theory of compressed sensing, a method for efficient coding and reconstruction of optical remote sensing images is proposed to reduce the pressure of data acquisition and transmission faced by large area scan cameras. First, a multi-domain perception matrix is constructed combining the spatial and compressed sensing domains. Compression is realized while sampling, and multiple compressed domain information is obtained. Then, for multi-domain compressed information, a reconstruction method based on the Huber function is proposed to rapidly reconstruct high fidelity images. The results of the optical image coding and reconstruction techniques proposed in this paper have higher structural similarity(SSIM) and PSNR compared to JPEG compression methods. Using images of the Jilin-1 satellite, single target and scene infrared images yields a PSNR reaching 40 dB and SSIM exceeding 0.8. Based on these findings, an efficient system for coding and restoring optical images is designed. The proposed system can meet the need for rapid compression and high fidelity reconstruction on the satellite.
Dec. 15, 2021Vol. 29 Issue 12 2956 (2021)
Fu-sheng ZHANG, Lei ZHANG, and Yang ZHAO
A strain detection and reconstruction system was developed to monitor deformations on spacecraft plate surfaces. To this end, a displacement field reconstruction method was proposed based on fiber Bragg grating sensors and an incremental extreme learning machine (I~~ELM). A four sided fixed support flat plate device was designed for strain detection and deformation reconstruction. Each of its panels had 12 sensors evenly distributed in a 4×3 grid. The accuracy and stability were improved by completely sticking method. A model for predicting structural deformation was then designed based on I~~ELM. The model could effectively predict structure deformation displacement after training. Finally, 3D restoration was realized after incorporating cubic spline interpolation. The average absolute error of the proposed approach was less than 0.05 mm and root mean square error was less than 0.005 mm. Therefore, this method can be used to monitor the deformation of spacecraft surfaces.
Dec. 15, 2021Vol. 29 Issue 12 2964 (2021)
Wen-jie WANG, Wei XU, Yong-jie PIAO, Ru-peng FENG, and Mei-li ZHOU
With regard to meeting the highly dynamic and steady-state performance of the coarse tracking system used for laser communication in a satellite, under the action of the step signal, the ordinary PID control has drawbacks such as large step response overshoot and long adjustment time to fulfill the engineering requirements. This study uses permanent magnet synchronous motor (PMSM) as the control object to establish a three-loop control model of the coarse tracking system and performs MATLAB simulation analysis. An adaptive gain control is proposed on the basis of ordinary PI control, and theoretical proof and simulation are executed. It provides a new method for the tracking system to shorten the adjustment time and reduce the overshoot. The tracking system is controlled by the FPGA main control unit. In the ground test, under the excitation of a 187.25 μrad (500 yard) step signal, the improved adaptive gain control strategy is better than ordinary PI control, the overshoot is reduced from 35.8 % to 10%, and the adjustment time of the system is shortened from 100 ms to 70 ms. The state accuracy is maintained at 2.247 μrad(±3 yards), and the control performance is significantly improved. Under orbital conditions, the adaptive gain control strategy shows good control performance, meeting the high precision requirements of the tracking turntable used for inter-satellite laser communication, and it has reference significance for the design of other high-precision servo systems.
Dec. 15, 2021Vol. 29 Issue 12 2797 (2021)
A-ni LUO, Yun-tao ZOU, Shi-song XIAO, and He-ping LIU
In order to expand the internal space in tensegrity elements, realize small space occupation before deployment, and effectively utilize the internal space after deployment, the axial folding mode and folding characteristics of tensegrity elements are studied. First, according to the tensegrity theory, the node, connection, and component matrices are introduced. Then, the axial-folding significance of tensegrity elements and the problems encountered during axial folding are proposed, and two axial folding methods of tensegrity elements are introduced. Then, on the basis of the two folding methods, the bending bar tensegrity is proposed, and the solution method of the node coordinates of the bending bar tensegrity is given. Finally, the elastic deformation of the bending bar tensegrity element in the fully expanded state until the upper and lower horizontal planes coincide is analyzed, and the limit-bending angle of the node is obtained using the finite element software. When the four-bar tensegrity element with a height of 270 mm and radius of 200 mm is fully compressed, the relative deflection angle of the upper and lower bottom surfaces is 57°, and the compression ratio of the bar length is 13%. When bamboo material is used for a bar member, the angle of the bending joint connecting the two bar members is at most 90°. The straight to bending bar tensegrity effectively avoids the interference between the bar components, which increases the effective utilization of internal space and realizes axial folding.
Dec. 15, 2021Vol. 29 Issue 12 2806 (2021)
Li XIONG, Jin HU, Zhao YANG, and Guan-hua ZHANG
The evolution of integrable, compact, portable, and multifunctional microelectronic devices has encouraged researchers to develop high-performance microcapacitors. In this study, capacitors were divided into conventional capacitors and microcapacitors, and the structural characteristics of conventional aluminum electrolytic capacitors, tantalum electrolytic capacitors, organic thin film capacitors, and ceramic capacitors were discussed. Additionally, the advantages and disadvantages associated with their production and applications were discussed considering their structural characteristics, technical process, and main performance indicators. Furthermore, the on-chip integrated system process compatibility of solid-state microcapacitors (metal-insulator-metal and metal-insulator-semiconductor) and microsupercapacitors for energy storage was investigated. The main manufacturing process, three research directions (electrode surface areas, insulating materials, electrode materials), and related research progress of on-chip 3D silicon-based capacitor structure were reported. Finally, the development trend of microcapacitors was predicted.
Dec. 15, 2021Vol. 29 Issue 12 2818 (2021)
Jin-shan YU, Xiao LI, Guo-xing WANG, Jian-guo TAO, and Hao-wei WANG
To improve the performance of a cable-driven parallel mechanism(CDPM) for on-orbit assembly through by changing its stiffness, a variable stiffness control algorithm was proposed. First, the complete stiffness model of the CDPM was established. Secondly, the influence of tension distribution on the stiffness in different directions was analyzed and studied. Then, considering the safety margin of the vector λ , which affected the tension distribution, a variable stiffness control algorithm for the CDPM was established. The algorithm eliminates the coupling stiffness that has a small effect on the overall stiffness in the stiffness model, improves the calculation efficiency, and can assign weights to control the stiffness in different directions with different prioritypriorities. Finally, the effect of the variable stiffness control algorithm was verified through a simulation and an experiment. Taking the screwing operation as an example, the simulation results show that when a disturbing force is applied to the moving platform, the tension distribution obtained by the variable stiffness control algorithm can reduce the vibration in the weak direction by 35%. The prototype experiment results show that after the stiffness control of the CDPM prototype, the measured value of the stiffness has a strong fit with the theoretical value, and the errors for these values are 16.3% and 14.6%, respectively. The proposed variable stiffness control algorithm can improve the performance of the CDPM by changing its stiffness.The algorithm has strong practicability and can be used for different types of redundant CDPMs.
Dec. 15, 2021Vol. 29 Issue 12 2832 (2021)
Zhi ZHANG, Hong-qian LU, Xiao-jun BAN, Xian-lin HUANG, and Xue-mei LIU
To study the cooperative localization algorithm for multi-aircrafts, noise data collected from a high-precision micro-electro-mechanical system (MEMS) inertial measurement unit (IMU), instead of simulation noise data, was employed to simulate the carrier platform using a MEMS/GNSS-integrated navigation algorithm to ensure that the application conditions of the positioning algorithm correspond to those in real applications. In addition, the accuracy of the passive location algorithm with only the line-of-sight(LOS)angle measurement was analyzed and improved. First,the parameters of the integrated navigation algorithm were set based on the real data of the MEMS IMU. Then, real IMU noise was added during the process of simulating the aircraft. The position coordinates of the aircrafts were obtained from the integrated navigation calculation process. Then,the mathematical model of the passive location algorithm was established based on only the LOS angle measurement. After the calculation results of the integrated navigation position stabilized,the position and velocity information of the target were estimated based on the extended Kalman filter(EKF)by employing position data. Finally,the federated filter algorithm was applied to extend the localization algorithm to a multi-machine cooperative localization algorithm,which further improved the fault-tolerant performance of the positioning system. An analysis and comparison of the geometric dilution precision (GDOP)of the dual machine positioning model and the performance of the dual aircraft cooperative positioning algorithm indicate that the proposed algorithm reduces the positioning accuracy of from 100 m to 5 m. The verification platform consists of simulated aircrafts with real MEMS sensor noise, which can determine their own positioning by utilizing the integrated navigation algorithm. Based on the federated filter algorithm,the multi-aircraft cooperative positioning is realized only for the case of the LOS angle measurement. The positioning accuracy is high,and the analysis results have practical value as reference.
Dec. 15, 2021Vol. 29 Issue 12 2844 (2021)
Da-ke TIAN, Xiao-dong FAN, Lu JIN, Rong-qiang LIU, and Ke ZHANG
A surface accuracy analysis model for the support structure of a hexagonal prism modular deployable antenna is proposed because of the large-scale, modular, and high-precision development trend of deployable antennas. The structural composition of the hexagonal modular deployable antenna is elaborated, and the topological rules of the hexagonal modular structure are analyzed. Based on the idea of equal envelope circles and the basic theory of robotics, two mathematical modeling methods of envelope circle, point-surface method and two-point method, are proposed, from which the mathematical model of the intersection point of the equal envelope circle and the mathematical model of the included angle of rib unit are established; the mathematical model for accuracy analysis of the shape surface of the support structure of a modular deployable antenna with a hexagonal prism is built. Finally, the model is verified using a combination of numerical simulations and experimental verifications. The simulation and experimental results show that the enveloping circle can closely fit on the spherical surface, and it is in good agreement with the spherical surface. In the numerical simulation model, the modules of the hexagonal prism are connected accurately. In the experiment, the absolute error of feature points is mainly distributed in 5 to 10 mm, the relative error is mainly concentrated in the range of 0.05% to 0.1%, and the absolute error of the rib unit angle is mostly distributed in the range of 0.05°to 0.1°. The deviation between the measured and the theoretical values is small, and the values are in good agreement. The proposed model can solve the spatial coordinates of all module connection points, which provides a theoretical basis for the analysis and research of the shape accuracy of multi-module deployable antennas.
Dec. 15, 2021Vol. 29 Issue 12 2855 (2021)
Chuang SHI, Ming-li LIU, Hong-wei GUO, Rong-qiang LIU, and Xiao-fei MA
The improvement of the space-to-earth observation range and observation accuracy has created demand for large-scale planar deployable antenna mechanisms. A new space large-scale two-dimensional multi-folding and unfolding planar antenna mechanism, which has been optimized for configuration, structure design, and dynamic characteristics analysis, is proposed in this study. First, a comprehensive evaluation index is established, and the overall configuration of the antenna with the best comprehensive performance is selected. Second, the structure of each part of the antenna mechanism is designed in detail and the prototype is developed. Additionally, the experimental verification of the deployment principle is carried out. Finally, the finite element model of the antenna mechanism is established, and the first five vibration frequencies of the antenna mechanism in the unfolded state and the corresponding mode shapes are obtained through simulation. Further, the cross-section parameters of each member are optimized with the system specific frequency as the optimization target. The folding ratio of the two-dimensional multi-folding and unfolding planar antenna mechanism designed in this study is greater than 17.6, which is an improvement over the folding ratio of the traditional planar antenna mechanism. The vibration fundamental frequency is 1.333 9 Hz, which helps in realizing the high rigidity support of the large planar antenna mechanism and provides a feasible scheme for the development of large planar phased array antenna mechanism in China.
Dec. 15, 2021Vol. 29 Issue 12 2868 (2021)
Hong XIAO, Hong-yang WANG, Hong-wei GUO, Sai ZHANG, Rong-qiang LIU, Bin FAN, and Jiang BIAN
The space optical camera is a high-precision system, and its primary mirror is supported by the repeatable development and collapse mechanism to achieve system imaging. To improve the accuracy of a space optical camera's repeatable development and collapse mechanism, the folding method of the membrane protective cover is proposed, and a parameter analysis is conducted based on the Miura origami principle. The NX/SST simulation software is used to calculate the temperature field of the repeatable development and collapse mechanism with and without the membrane protective cover. Further, the deformation law of the primary mirror mounting surface under different temperature gradients is studied. The extension mechanism membrane protective cover prototype is used to perform the repeatable development and collapse experiment of the extension mechanism. The results show that when the expansion angle of the repeatable expansion and collapse film protective cover, designed in this study, is 120°, the structure has completed nearly 85% of the expansion. Moreover, the shape of the model is still regular at this time, which verifies the passively repeatable development and collapse function of the protective cover. Through thermal analysis, it is found that the maximum temperature of the camera’s internal extension mechanism with a protective cover is 12℃, and the minimum temperature is 3.5 ℃. Compared with the no protective cover case, the maximum temperature is reduced by 22 ℃, and the minimum temperature is increased by 51.5 ℃. The protective cover effectively reduces the temperature gradient of the extension mechanism. The experimental results show that after 10 repeated development tests of the extension mechanism, the average repeatability accuracy absolute value in the X, Y, and Z direction are 0.002 16 mm, 0.005 96 mm, and 0.003 48 mm, respectively. The extension mechanism designed in the study has a high repeatable expansion accuracy, and the film protective cover designed based on the origami principle has good repeatable development and collapse, shading, and thermal control effects, which can effectively ensure the application of the optical cameras in space environments.
Dec. 15, 2021Vol. 29 Issue 12 2877 (2021)
Xing-tan LIU, Cheng-yu ZHANG, Yan-peng WU, Bao-cheng HUA, and Fen-zhi WU
In-orbit sequence image Rendering Observation Technology(IROT) in space light field is proposed for a set of small celestial bodies. It integrates the surface reflection characteristics, orbital characteristics, and observation needs of small celestial bodies; provides parameters such as position sequence, light angle, and camera characteristics of the target at the observation time; and generates a physical rendering image set that conforms to the imaging characteristics of the detector. First, the methods of 3D reference model establishment, reflection characteristic file generation, physically based rendering, fast conversion method of the normalized spectrum, and gray response are studied. Then, by rendering the image authenticity test and terrain 3D modeling test, the closed-loop simulation observation verification is carried out for the images of Itokawa at a specific observation time and location. Experimental results indicate that by matching the two-dimensional projected topographic map of the reconstruction model, the root mean square of the image grayscale value registration is 0.178 5, corresponding to an elevation difference of approximately 0.062 8 m of the surface of the small celestial body. The rendering observation technology can effectively serve the reconstruction of the terrain model of small celestial bodies and the construction of a terrain relative navigation closed-loop analysis environment. In addition, to meet the needs of on-orbit fast calculation, the fast conversion method of the normalized spectrum and gray response is proposed. The calculation time is significantly reduced from several hours to seconds, while retaining the same accuracy.
Dec. 15, 2021Vol. 29 Issue 12 2745 (2021)
Xiao-tian LU, Feng LI, Xue YANG, Zhi-yi ZHAO, and Jun-yan HOU
In order to realize a compact, low delay, and fast target detection polarization imaging system, this study takes advantage of the characteristics of a dynamic vision sensor with high sensitivity and imaging speed to study the polarization detection method based on the dynamic vision sensor and then designs and builds the experimental system. Based on the contrast sensitivity of the dynamic vision sensor and the principle of optical polarization, the feasibility of the polarization detection method based on the dynamic vision sensor is proved theoretically. The experimental system is designed and built. The rotating platform carries the polarizer to rotate it rapidly. Because the reflected light of the scene in the field of view has different polarization characteristics, the transmitted light changes in brightness after rotating the polarizer. The dynamic vision sensor quickly captures the changes and images. The system uses embedded graphics processing unit control and real-time display. The experimental results show that the sensitivity of the polarization degree in the field of view is 0.148, and the target contour is clear with good visibility. The proposed system overcomes the shortcomings of the traditional polarization imaging system, such as large size and low imaging rate,and lays the foundation for the application of target detection based on polarization images.
Dec. 15, 2021Vol. 29 Issue 12 2754 (2021)
Xin-tao WANG, Jian-hua ZHENG, and Ming-tao LI
To investigate asteroid visibility in space-based optical surveillance using the radiative transfer theory, a brightness model of zodiacal and galactic light was introduced, and a signal-to-noise ratio (SNR) model for space-based asteroid surveillance was established. Combining the designed visible sensor with telescope performance parameters, the SNR and apparent magnitude of the target asteroid relative to the telescope over time were simulated. By considering the minimum SNR and solar avoidance angle, the maximum surveillance distance of a visible telescope deployed on an Earth-leading heliocentric orbit for asteroids of different diameters was calculated. The sensitivity of the SNR and apparent magnitude to the physical parameters of the asteroids was studied by changing the physical parameters of the asteroids. The results show that the distance of the asteroid relative to the telescope increased by approximately 0.09 AU, the apparent magnitude of the asteroid increased by approximately 0.51, and the SNR of the asteroid relative to a telescope with an aperture of 0.7 m decreased by approximately 3.78 during the period under observation. Owing to good coverage of the vicinity around the Earth with a radius of 0.05 AU, there is a unique advantage for visible telescopes deployed on Earth-leading heliocentric orbits to warn of asteroids approaching from the sunward direction; they can provide an early warning distance of 7.5 million km for asteroids with a diameter of 20 m. In the visible light band, the SNR and apparent magnitude of asteroids are sensitive to the visual albedo but not to the temperature and visual emissivity. The model established in this study provides a theoretical basis for the dynamic analysis of the SNR and the assessment of early warning distances for space-based optical surveillance of asteroids.
Dec. 15, 2021Vol. 29 Issue 12 2763 (2021)
Yue WANG, Xin-yue LIU, Xin-ran LIU, Xu CUI, and Hao-ran MENG
In situ detection of extraterrestrial life is significant for scientific research and humanities. In future exploration missions, marine worlds such as Europa are gradually becoming new subjects of interest. Considering the application of digital holography in deep-sea microbial in-situ detection, the application of digital holography in the in-situ detection of extraterrestrial life is proposed in this study. The research progress of digital holography for extraterrestrial life detection is investigated, and the two technical solutions of common mode and lensless digital holographic microscopy proposed by the Gene Serabyn team are summarized. Digital holography for extraterrestrial life detection is in the laboratory-research and development stage; in situ detection of marine microorganisms at low temperature and low cell concentration is the basis for the detection of extraterrestrial life, and the feasibility of the proposed idea has been indirectly verified. Digital holography is an ideal solution for realizing the detection of extraterrestrial life. The optimization of digital holography for in-situ detection of microorganisms in the earth's oceans can lay the foundation for future extraterrestrial life detection missions.
Dec. 15, 2021Vol. 29 Issue 12 2774 (2021)
Yi-Lan ZHANG, Hao-dong SHI, Chao WANG, Ying-chao LI, Zhuang LIU, Su ZHANG, Jia-yu WANG, and Hui-lin JIANG
The influence of polarization aberration on detection accuracy and imaging quality in a spatial optical system containing freeform surfaces was analyzed. First, based on the Jones notation, a freeform surface off-axis optical system with fringe Zernike polynomials as the characterizing function was proposed. Second, the polarization aberration analysis model of reflective optical system with freeform surface was developed. The influence of fringe Zernike polynomial low-order coefficients on the polarization aberration distribution of the field of view off-axis optical system was analyzed. Then, by tracing the polarized light through full field of view and by comparing before and after the freeform surface was introduced, the freeform surface effected on three types of polarization aberrations, that is, phase aberration, retardance, and diattenuation, of the field-bias optical system were verified. Finally, a wide-field off-axis three-mirror optical system with freeform surface and the polarization aberration of the full field of view were analyzed. The analysis results show that the phase aberration distribution is consistent with the freeform surface sagittal height distribution, and the retardance and diattenuation caused by the freeform surface account for 52.5% of the retardance and diattenuation of the total system, respectively. Improving this polarization characteristic change is important for the design of very high-precision optical systems such as deep-space astronomical telescopes.
Dec. 15, 2021Vol. 29 Issue 12 2783 (2021)
© Copyright 2018-2021 | Chinese Laser Press.
All Rights Reserved 沪ICP备15018463号-20