









Please enter the answer below before you can view the full text.
9+9=

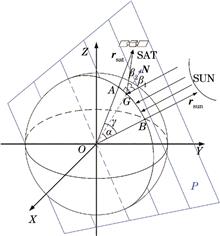
The sun glint observation mode is adopted when a satellite payload detects greenhouse gases over the ocean to obtain high-precision gas concentration data. Therefore, accurately calculating the real-time sun glint position is a prerequisite for obtaining high-precision data. An improved sun glint calculation model based on an optimal line search is proposed. According to the WGS-84 ellipsoid model, on the basis of dichotomy searching to meet the requirements of specular reflective speckles, the algorithm is improved by using the idea of optimal line search to better meet the coplanar condition of the sun glint. Compared with the simulation results of the Satellite Tool Kit (STK), the sun glint position distance error calculated by the improved model is significantly reduced to 90 m.
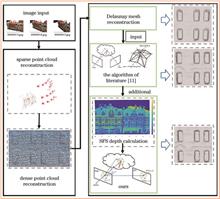
To solve the difficulty in obtaining good texture details using surface mesh reconstruction algorithms, a surface mesh optimization algorithm based on shape from shading (SFS) is proposed. The surface mesh model is chosen as the initial value. Then, the mesh vertex is projected onto a visual image to obtain its corresponding SFS depth value. The photometric consistency constraint algorithm is used to fuse the SFS constraint algorithm as the data item, and the curvature constraint algorithm of the model is used as the smoothing item to form the mesh vertex optimization energy function. Finally, the gradient descent method is used to minimize energy as well as adjust the mesh vertices and optimize its model. In the DTU dataset, the proposed algorithm outperforms the input mesh model by 14.5% and the existing mainstream surface mesh optimization model by 1.12%. The experimental results show that the proposed algorithm can substantially improve the texture details of surface mesh models, the accuracy of mesh models, and the effect of reconstruction models.
To address challenges in the non-destructive inspection and classification of kiwifruit hardness quality, we propose a classification model that incorporates hyperspectral imaging technology and a convolution neural network. This network combines the spatial feature information extracted by the Haar wavelet and the space-spectrum joint information extracted by the three-dimensional (3D) convolution kernel. In this network, the data decomposition of channel connections is executed to ensure that all features can be utilized by the model, which improves the ability of network feature learning. Experiments on the acquired hyperspectral image-based, self-made kiwifruit hardness quality dataset (named Kiwi_seed) demonstrate that the Haar wavelet transform module can significantly improve the feature extraction ability of the network. Ablation experiments reveal that the classification accuracy of the model incorporating the Haar wavelet transform module is increased by 7.4% and reaches the optimum level at 97.3%, which is better than the classical image classification network. The proposed classification model can be effectively used for the non-destructive inspection and classification of kiwifruit quality.
There are many symmetric objects in the real world. Three-dimensional (3D) laser scanning equipment can be used to obtain a 3D point cloud of symmetric objects; however, the 3D point cloud defects are easily caused by occlusion factors and the equipment itself. To resolve this problem, this paper proposes an incomplete laser 3D point cloud classification and completion approach based on object symmetry. Herein, according to the symmetric key points in a single two-dimensional image, a mapping relationship of the symmetric plane was established, and the incomplete point cloud was classified by the position of the symmetric plane in the point cloud. Moreover, for a half residual defect point cloud, symmetric plane detection was performed directly followed by the image completion. For a less than half-incomplete point cloud, it was fused with the mirror point cloud to remove the duplicated data points for image completion. Furthermore, for a greater than half-incomplete point cloud, the direct hole-repair method was used to complete the missing information after fusion with the mirror point cloud. For extremely defective point clouds, the input point cloud was fused with the mirror point cloud and then fused with a completed similar point cloud as too much information was missing. Finally, redundant points were removed to complete the missing information. The experimental results of the actual acquisition point cloud of the incomplete 3D point cloud and the point cloud in the public database show that the proposed approach can complete different types of incomplete point clouds. These results are very similar to that of the entire complete point clouds. Thus, here, the effectiveness and feasibility of the proposed classification and completion approach are verified.
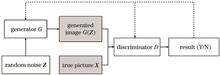
Presently, image inpainting in the inheritance and protection of Chinese traditional embroidery often depend on human labor, with considerable work force and material resources. Furthermore, with the rapid development of deep learning, generative adversarial networks can be applied to repair damaged embroidery relics. An embroidery image restoration method based on improved deep convolutional generative adversarial network (DCGAN) is proposed to solve the above problems. In the generator part, dilated convolution is introduced to expand receptive fields; the addition of the convolution attention-mechanism module enhances the guiding role of significant features in two dimensions of channel and space. In the discriminator part, the number of full connection layers are increased to improve the ability of the network to solve nonlinear problems. In the loss function part, the mean square error loss and confrontation loss are combined to realize embroidery image inpainting through the game process of network training. The experimental results show that the dilated convolution and convolution attention mechanism module improves the network performance and repair effect, and the structural similarity of the repaired image is as high as 0.955. This method enables obtaining a more natural embroidery image-restoration effect, which can provide experts with information such as texture and color as a reference to assist subsequent repair.
In order to solve the problem of missing object information due to external influence in the sampling process of computational ghost imaging, wavelet analysis is applied to the computational ghost imaging system, and image fusion method is introduced into this system to build a computational ghost imaging system based on image fusion. Simulation and experimental research are carried out on this problem. The results show that this system can effectively recover the information of the object to be measured and improve the imaging quality, which is more suitable for the actual application environment than the traditional computational ghost imaging system.
The pathogenesis of the small intestine, with several folds, is hidden. Generally, optical systems with a large depth of field (DOF) are conducive to obtaining abundant pathological information during diagnosis. However, current capsule endoscope optical systems that are available in the market have a small DOF. In this study, we propose a capsule endoscope optical system that can effectively produce images in the range of 7?100 mm DOF while ensuring a certain resolution. The field of view (FOV) angle of the proposed system is 100°. Additionally, its F-number is 5 and the modulation transfer function is greater than 0.35 (at 125 lp/mm frequency) in the full FOV, thereby meeting the imaging requirements of the matched OV9734 imaging chip. Furthermore, the tolerance analysis of this optical system shows that it can satisfy the requirements of conventional production and assembly within the machinability range.
In non-line-of-sight imaging scenes, while effective echo photons are reduced to a great extent, Poisson noise largely impacts the non-line-of-sight imaging quality. Moreover, issues such as long iteration time, fixed mode, and manual parameter setting have been identified with traditional image Poisson noise suppression algorithms. Therefore, to improve the quality of non-line-of-sight imaging, this study designed a deep learning-based Poisson noise suppression method for single-photon non-line-of-sight imaging. First, geometrical optics approximation and Monte Carlo methods were implemented to track and model the photon motion trajectory in the non-line-of-sight scene, simulate the non-line-of-sight imaging process, produce a dataset using the Poisson noise images reconstructed from the simulation data, and address the problem of insufficient training samples. Subsequently, we designed an attention-based feature-enhanced noise suppression network (AEF-Net), followed by optimization and training of the network using simulation data. Furthermore, we built a non-line-of-sight imaging system to verify the Poisson noise suppression performance of the network. The experimental results show an outperformance of our designed noise suppression attention-based feature-enhanced noise suppression network than the conventional noise suppression algorithms for removing Poisson noise from non-line-of-sight scenes.
A two-channel low-voltage driving liquid crystal microlens array structure is proposed to solve the complex structure and narrow field of view of conventional microscopes. The focal length of the lens is controlled by three electrodes, and the middle electrode has a circular hole array pattern, which acts as an aperture stop to block stray light. The wavefront and optical power of the array are measured. A simple direct imaging system of the liquid crystal microlens array is developed. Each part of the object is imaged by the corresponding microlens. The crosstalk between adjacent microlenses is reduced via near-parallel light illumination, and the subimages are combined to obtain the complete image. The system requires no additional optics and has a simple, compact structure. The liquid crystal microlens array has a broad field of view, and the imaging area is scalable. This study provides a new technique for achieving simple microscopic imaging in a broad field of view.
Co-phasing alignment of the optical multi-aperture is effective method in achieving high-resolution imaging. A correction method based on interference image sharpness is proposed to resolve the piston error between sub-apertures. A numerical simulation model is established and the correction range and piston error of the proposed correction method are analyzed according theoretically. According to the results, under polychromatic light, this iterative optimization method achieves a high-precision, closed-loop correction of piston errors smaller than the coherence length. In this method, the sharpness function of the far-field interference image is considered to be the objective function, and the integer multiple of the half-center wavelength is used as the step size for the bilateral perturbation gradient descent algorithm.
Aiming at the problem of how to quickly and accurately obtain complete 3D point cloud data within a mold, a 3D point cloud stitching algorithm combining a robotic arm and a 3D visual device is proposed. In the initial stitching process, the hand-eye calibration method is used to obtain the hand-eye matrix, and the point cloud is converted to the robot base coordinate system to complete preliminary stitching and obtain a good initial registration position. On this basis, an improved iterative closest point (ICP) algorithm is proposed, which combines intrinsic shape signature (ISS) features to obtain key points, and uses random consistency algorithm to eliminate erroneous matching points. During the point matching process, point to face matching is used to obtain a complete spliced point cloud. The experimental results show that the proposed algorithm has good robustness in comparison with the ICP algorithm and other improved ICP algorithms in terms of registration performance, and the algorithm time consumption and registration error are significantly reduced. The error of a complete mosaic point cloud is 0.12 mm, which has high engineering practical value.
Recently, three-dimensional point cloud semantic segmentation techniques based on sparse convolution have made great progress. However, sparse convolution causes a loss of global context information. In this study, a point cloud semantic segmentation method based on a sparse convolution and attention mechanism is proposed. Here, the attention mechanism is introduced into a sparse convolutional network to improve the network's ability to achieve global context information. However, extensive computation of the attention mechanism limits the applicability of the proposed method. Hence, to expand its usage while decreasing the amount of computation, spatial pyramid sampling is further introduced in the attention mechanism. Experimental results demonstrate that the proposed method achieves 71.825% of the average intersection over union (MIOU) on the Scannet V2 dataset and 70.5% on the S3DIS dataset, suggesting the proposed method's effectiveness and its superiority to the comparison method.
Large-view, high-precision vision systems are becoming more and more in demand as industrial machine vision advances. Aiming at the issue of low accuracy caused by a large field of view, a joint calibration approach based on multiple low-pixel cameras is proposed. In a multi-camera setup, choose one camera to serve as the main camera. Then, determine the mapping matrix between the pixel coordinate systems of the other cameras and the main camera's pixel coordinate system such that the main camera's field of vision can be infinitely expanded. At the same time, to obtain the coordinates of the center pixel in the calibration plate image more precisely, the two-step calibration approach is employed to enhance the calibration accuracy. Extract the pixel coordinates of the center of the calibration plate for the first rough calibration, obtain the camera internal parameters and the calibration plate position and pose, and thus obtain the mapping correlation between the image plane and the plane Z=0 of the world coordinate system. After adjusting the perspective deviation, extract the center of the calibrated plate, use an inverse mapping transformation to return the associated center to its original location, and then calibrate the primary camera a second time using the converted center pixel coordinate position. Finally, the Levenberg-Marquardt algorithm is used for nonlinear optimization to achieve the global optimal solution. The experimental findings demonstrate that the re-projection error of the suggested calibration method is between 0.005 pixel-0.01 pixel.
To address the issues of low accuracy, slow speed, poor robustness, and missed detections while utilizing traditional image processing algorithms for identification of contact lens surface defects, an algorithm based on an improved Faster R-CNN is proposed. First, ResNet50 was chosen as the backbone network based on the performance of three feature extraction networks. Second, a feature pyramid network (FPN) is introduced to enhance the multi-scale detection capability of Faster R-CNN by fusing multi-level feature information. Finally, based on the dataset of contact lens surface defects, K-means++ algorithm is used to improve the size and number of anchors. According to the experimental findings, the updated Faster R-CNN algorithm's mean average precision (mAP) on the test dataset is 86.95%, 9.45 percentage points greater than the original Faster R-CNN algorithm. The improved algorithm can efficiently identify several typical defects of contact lens, such as the bubble, turning point, scratch, and mold point.
Electroluminescence (EL) inspection technology is widely used as an important means for solar cell and module defect detection. However, defect screening in EL inspection is still a major challenge. Herein, to overcome the limitations in previous studies, such as few types of defects to be identified, the inability to locate defects, the large size of model parameters, and slow detection speed, the upgraded YOLOv5 network is used to detect and classify the four types of defects that are commonly found in electroluminescent images, including crack, finger interruption, break, and black zone. This shows that the improved Ghost module extracts ordinary convolutional modules in the network to reduce number of network model parameters compared with the YOLOv5 backbone. Additionally, to ensure good detection performance, the Squeeze-and-Excitation (SE) attention module is added to the tail of the backbone network to improve the algorithm' target detection ability. In the neck part, the bidirectional feature pyramid network (BiFPN) structure is used to further strengthens the feature fusion capability of the network. Experimental results show that the proposed model successfully identifies and locates the four common defects, has a reduced volume by 21% compared with the YOLOv5 algorithm and achieves an improved single image detection speed by 17.4% without GPU acceleration.
Recently, advancement in deep learning and three-dimension (3D) imaging technology based on structured light fringe projection on the recovery of the 3D shape of objects from a single fringe image has attracted considerable attention. In this paper, MultiResHNet, an improved global guided path network, is proposed for the 3D shape reconstruction of a single fringe pattern. Herein, the simulation data and experimental data are verified by combining the existing structural optics 3D imaging scheme with the deep convolutional neural network. The experimental results show that the proposed method accurately predicts the 3D shape with lesser errors compared with the existing U-Net neural network. Therefore, our experiments prove the effectiveness and robustness of the proposed method, providing a scientific basis for the improvement of subsequent 3D shape reconstruction with a certain reference value and an application value.
Aiming at the characteristics of small defect areas and less available information of metalized-ceramic rings, and the problem of low defect detection accuracy, a defect detection method of metalized-ceramic rings based on the fusion of target detection and image classification networks is proposed. First, an improved Faster-RCNN target detection network for small-area target detection is used to realize the preliminary identification and location of the defects. Then, the interpolation method is used to enlarge the located defect area, and the information association between the adjacent pixels of the image increases the feature information of the defect detection. Moreover, the ResNet image classification network is used to judge the defect category of the enlarged area. Finally, the final defect detection results were obtained using the target detection and image classification network results. The experimental results show that the proposed method can effectively improve the precision while ensuring defect detection recall and accurately locate the defect area.
Fourier ptychography microscopy (FPM) is limited by hardware and algorithm, and its overall performance needs to be improved. To address the issues of slow imaging speed and low imaging quality of traditional FPM technology, the FPM image reconstruction approach integrated with depth learning has been widely explored. Herein, based on this, a super-resolution countermeasure generation network-based FPM model is proposed. Furthermore, global feature fusion is obtained by adding dense block connections using the original network, and a weighted loss function is used to enhance the quality of image reconstruction. The reconstruction results of the resolution plate image demonstrate that the proposed depth learning method has a better reconstruction effect and faster reconstruction speed than the conventional method.
In order to achieve the miniaturization design of visible/short-wave infrared lenses, referring to the optical system with annular multireflection structure, and aiming at the problem that it is difficult to correct chromatic aberration in a single piece multireflection system, a compact dual piece annular multireflection optical lens with 1.3 million pixels is designed. The optimal obscuration ratio and optical parameters of the system are determined by analyzing their effect on the optical transfer function of the system. The optimized optical lens comprises two lenses made of calcium fluoride, which realize four reflections. Each reflective surface is an even aspheric surface. The proposed lens has a working band of 400?1700 nm, focal length of 75 mm, diameter of 50 mm, obscuration ratio of 0.75, and full field angle of 6.2°. The total length of the system is 22.7 mm, and the system length-to-focus ratio is 0.302. The optical transfer function curve of the proposed lens is smooth, more than 0.35 at 100 lp/mm, and its lateral color is <0.9 μm. The imaging quality of the proposed lens is good.
To fully utilize the spatial and spectral information of hyperspectral images and alleviate the problem of insufficient training samples, a semi-supervised hyperspectral anomaly detection model fused with spatial-spectral features is proposed. First, unsupervised clustering is used to automatically construct spatial-spectral background datasets for network training. Then, a dual-path model based on automatic encoder and generative adversarial network is built for learning background spectral features and reconstructing band information respectively. The space branch increases the difference between the background and anomaly using a filter, resulting in spectrum anomaly scores and band outliers. Finally, the spatial-spectral characteristics of anomaly detection are fused. The effectiveness of the proposed method is verified on real hyperspectral images. The experimental results show that the proposed method is superior to the conventional anomaly detection method, with an average detection accuracy of 99.55%.
Building extraction from high-resolution remote sensing images is easily affected by the surrounding shadows and vegetation, leading to incorrect detection of buildings in these areas and the building contour would deviate considerably from its actual shape. Therefore, this paper proposes a regularization method for building contour based on bidirectional-driven adaptive segmentation and reconstruction to solve this problem. First, to reduce the jagged representation on the contour graphics display, a flat rotation transformation algorithm based on the minimum bounding rectangle (MBR) was adopted to rotate the building contour to the horizontal or vertical state. Then, MBR and Shi-Tomasi were combined to develop the bidirectional-driven adaptive segmentation algorithm, thereby allowing the building contours to be divided into small parts to form accurate local segments. Finally, a contour reconstruction algorithm based on local optimal weight fitting was proposed. The regularization of the building contour was achieved through attribute assignment, constraint recombination, optimal weight fitting, and coordination reconstruction of local segments. Compared with the initial extraction results, the visual experimental results of the regularized contour obtained using the proposed method are better. Furthermore, compared with the other four similar contour regularization methods based on grid filling, corners correction, suitable circumscribed rectangle fitting, and main direction, the proposed method provides an efficient contour regularization, a higher accuracy, and broader applicability. The proposed method can obtain more regular contours for typical complex buildings with different angle changes. This method can be used as a reference for post-processing regularization of building extraction.
Optical phased array LiDAR systems possess small sizes and high-speed scanning capabilities. However, their performance is severely limited by the grating lobe problem. The non-equal spacing optical phased array method resolves this limitation by breaking the periodicity of optical phased arrays and suppressing grating lobe formation. The proposed particle swarm optimization algorithm improved upon the traditional algorithm by introducing adaptive parameter optimization, a perturbation strategy, and an optimal retention strategy to improve the optimization effect of the traditional algorithm. Moreover, it continuously optimized the optimal element distribution of optical phased arrays to obtain the element spacing values that reduced the level of grating lobes. The grating lobe optimization method based on the improved particle swarm algorithm was simulated and tested. The test results revealed that the maximum grating lobe value can be reduced to 0.0968, effectively addressing the grating lobe problem. Finally, the proposed algorithm was used to study the two-dimensional rectangular planar array and an optimization design method for a two-dimensional nonuniform optical phased array was proposed.
Remote sensing image target detection technology has gained considerable attention with the improvement of remote sensing image resolution. This thesis proposes a remote sensing target detection algorithm based on multilevel local self-attention enhancement to solve such problems as complex background noise, arbitrary target direction, and large changes in target size in remote sensing images. First, the proposed algorithm adopts the Swin Transformer feature extraction module in an Oriented region-based convolutional neural network (R-CNN) backbone network, and the multilevel local information of feature-extracted semantic information is modeled using the Transformer module with shifted window operations and hierarchical design. Second, Oriented RPN is used to generate high-quality directed candidate boxes. Finally, the Kullback-Leibler divergence (KLD) between Gaussian distributions is regarded as the regression loss function, allowing the parameter gradient to be dynamically adjusted based on the object's characteristics for more accurate regression of the detection boxes. The mean average precision (mAP) of the proposed algorithm reaches 77.2% and 90.6% on the DOTA dataset and HRSC2016 dataset, respectively, and it is increased by 1.8 percentage points and 0.5 percentage points compared with the Oriented R-CNN algorithm. The results reveal that the proposed algorithm can effectively advance the target detection accuracy of remote sensing images.
High noise and redundancy of outliers in the initial point cloud result in low efficiency of three-dimensional reconstruction and rough surface of reconstructed surface. Thus, this study proposes an improved preprocessing algorithm for an adaptive simplified point cloud. Statistical filtering was used to eliminate outlier noise, and the hyperbolic tangent function was introduced into the downsampling based on the voxel center of gravity adjacent feature points to maintain the point cloud features and simplify the point cloud data. The moving least square fitting function was then established. Furthermore, its quadratic basis function and Gaussian weight function were determined, and the point cloud data was smoothed and optimized. Finally, the projection triangulation algorithm was used to reconstruct the point cloud surface. Experimental results show that the proposed algorithm can effectively remove outliers, simplify point cloud data, and improve the efficiency of surface reconstruction, and the reconstructed model has a smooth surface and fewer holes.
To solve the difficult problem of the classification of high-resolution remote sensing images having large intraclass differences and small interclass differences, a hybrid structure using the advantages of convolutional neural networks and a Transformer in deep learning is proposed herein. Feature clustering is carried out for each channel along the horizontal and vertical directions using two attention mechanisms with spatial location information for the features extracted from the convolutional layer. This reduces the redundant mapping of remote sensing scene features and enables the network to extract more information relevant to the task object. Then, the captured feature maps are processed via encoding operations using the Transformer encoder structure to enable the allocation of greater weights to the regions of interest in the feature maps. The experimental results show that the proposed method reduces number of model parameters and increases the classification accuracy compared with the existing deep learning-based remote sensing image classification methods, achieving the highest average classification accuracy of 98.95%, 96.00%, and 95.01% on the remote sensing image classification datasets of AID, NWPU-RESISC45, and VGoogle, respectively.
Simultaneous localization and mapping (SLAM) is one of the basic requirements of autonomous driving. Furthermore, multisensor fusion, more particularly, the fusion of lidar and camera, is essential for autonomous driving, and understanding how to adjust the weights of different sensors for various scenarios is a critical challenge. Therefore, an adaptive tightly coupled lidar-visual SLAM (AVLS) algorithm is proposed. First, AVLS is built on a factor graph based on sliding windows, including modules such as flexible depth correlation and elastic initialization that improve the accuracy and robustness of the overall algorithm. Second, in order to fully explore the performance of lidars and cameras in different environments, a dynamic weighting scheme based on prior knowledge is adopted. Finally, comprehensive experiments are conducted on the proposed AVLS algorithm on two publicly available large-scale autonomous driving datasets, including comparisons with classical algorithms and ablation experiments. The experimental results show that the robustness and accuracy of the AVLS achieves state-of-the-art performance.
Large-area 3D laser scanning is susceptible to interference from multi-frequency vibration noise of an acquisition vehicle, resulting in low accuracy of the acquired 3D pavement morphology. Traditional filtering and image processing techniques cannot perform component analysis and complex processes. Thus, a variational modal decomposition (VMD) algorithm based on the modified Harris Hawk optimization (AMHHO) algorithm is proposed to analyze the pavement components and achieve accurate stripping of multi-frequency vibration information. The pavement point cloud data acquired by the vehicle-mounted 3D laser camera is downscaled to obtain the pavement longitudinal profile signal. This signal is then decomposed by the proposed AMHHO-VMD algorithm to obtain intrinsic mode functions, which are then Fourier-transformed and combined with the vibration state of the acquisition unit to determine the multi-frequency vibration information. Finally, the accurate 3D morphology of the pavement is obtained after reconstruction of the filtered effective components. Experimental results show that compared to the empirical mode decomposition (EMD) algorithm and wavelet packet decomposition algorithm, the proposed AMHHO-VMD algorithm can strip the multi-frequency vibration components from the original pavement point cloud and obtain an accurate 3D morphology of the pavement.
In this paper, to manage the lidar signal noise, an effective denoising method of wavelet packet transform decomposition and reconstruction based on data segmentation is proposed. This can provide high-quality data for extinction coefficient retrieval. Herein, to verify the proposed denoising method feasibility, the differences between the original radar data, the extinction coefficient retrieved after wavelet packet processing, and the extinction coefficient retrieved after segmented wavelet packet processing were compared. In the numerical simulation using Bump and Block test signals, the value of mean square error (MSE) and R of the wavelet packet algorithm based on data segmentation was found to be better than that of the other wavelet packet algorithms. The corresponding experimental result indicates that the segmented wavelet packet denoising method can improve the results of the next-level inversion extinction coefficient via denoising, effectively protect the detailed structure of the low-altitude lidar extinction profile, and suppress the noise at high altitudes. Furthermore, the changing of the extinction coefficient pseudo-color image of air aerosol with time and space shows the feasibility and usefulness of the proposed method.
Non-diffracting beams have attracted attention in recent years due to their unique properties, such as diffraction-free propagation and self-repairing and self-accelerating ability, which make them promising candidates for microscopic imaging applications. Non-diffraction beams can suppress beam diffraction during propagation, thereby improving the imaging resolution. Moreover, their self-healing characteristic facilitates quick wave-front recovery after passing through a strongly scattering medium, enhancing imaging depth and signal-to-noise ratio. Their self-acceleration feature expands the detection dimension of light field information, enabling multi-dimensional reconstruction imaging. Based on the characteristics of several biological micro-imaging technologies, this paper discusses the application and research progress of non-diffracting beams, specifically Bessel and Airy beams, in high-resolution biological micro-imaging.
The application range of biomedical imaging systems composed of smartphones has been continuously expanding. By designing an optical accessory adapter, the imaging function of such systems can be improved to carry out medical and clinical auxiliary diagnoses. Smartphone imaging systems have been utilized successfully in dermatology, ophthalmology, ENT, gynecology, and other fields. This study examines the present uses of smartphone-based medical device imaging systems as clinical aids for diagnosis, as well as the concepts and characteristics of the imaging technology used. Based on their application in different departments, the features of the imaging systems are analyzed and summarized as future development trend prospects. The aim of this work is to provide a reference for future research and development of smartphone-based medical imaging systems.