




 View fulltext
View fulltext

2024
Volume: 32 Issue 12
14 Article(s)

Daoman RUI, Cheng ZHANG, Wenru LI, Cheng LI, Fengai WEN, and Hao XIAN
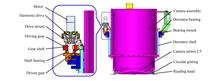
In the observation of large survey telescopes, the camera is required to expose designated sky area for a long time. The long exposure image is rotated due to the Earth’s rotation. The derotator is used to counteract the impact of the Earth's rotation on the imaging quality, ensuring stable position and energy concentration of the imaging spot on the camera. Camera rotation method is used as the derotator of Mozi sky survey telescope. The derotator requires a bearing capacity of ≥ 250 kg, a speed of >20′/s, and an angular positioning accuracy of ≤ 2″. This article analyzed the factors that affect the load-bearing capacity, rotational speed, and positioning accuracy of the derotator. High-precision turntable bearing combined with lightweight rotating shaft were adopted to achieve high-precision and high stiffness shaft in this paper. The shaking of the shaft system was 1.9″. The transmission system adopted a harmonic reducer combined with a cylindrical spur gear pair for two-stage transmission, achieving low speed and high angular resolution. The absolute circular grating with dual reading head was used to measure the angle error. The compensated angle positioning accuracy was better than 1.1″. The survey image with concentrated energy spot and no image rotation after the compensation of the derotator. The Mozi sky survey telescope achieves the goal of high-quality imaging.
Jun. 25, 2024Vol. 32 Issue 12 1849 (2024)
Hailong GAO, Wenqiang SHEN, Zhijie DU, Jiajun CAO, Xiaodong WANG, and Zhifeng LOU
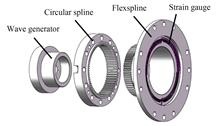
In order to achieve precise force control of collaborative robot, an in-situ integrated torque sensor is developed by using the deformation of the flexspline of the harmonic reducer. Proposed a residual ripples compensation method based on Fourier series model to improve measurement accuracy. Firstly, the strain law at the bottom of the flexspline was analyzed, and the sensitive grid structure of the strain gauge was designed based on the principle of sinusoidal superposition; Then the Fourier series model between the remain ripples and the angle of the wave generator was established to compensate the residual ripple; Finally, a test platform is developed for loading test, the results show that the output errors of the self-made torque sensor and the standard torque sensor are 0.988% and 0.253% when the instantaneous excitation and step load are applied under the static state of the wave generator; Under the rotating state of the wave generator, three kinds of loads, i.e. step change, sinusoidal change and man-made collision in the process of sinusoidal change, are applied. The output errors between the self-made torque sensor and the standard torque sensor are 3.822%, 4.247% and 4.456%. The compensation method proposed in this paper can effectively reduce the interference of residual ripple on the sensor output, which is conducive to the realization of accurate measurement of joint torque.
Jun. 25, 2024Vol. 32 Issue 12 1857 (2024)
Liu YANG, He HE, Jiajia CHENG, and Dongjie LI
In the field of microscopic vision, piezoelectric-driven positioning technology has attracted significant attention due to its high precision and flexibility at the microscale. However, the presence of delays in processes such as image processing, transmission, and control during positioning introduces significant estimation errors in the image Jacobian matrix. Therefore, this paper proposed an improved extended Kalman filter algorithm to predict the image Jacobian matrix and substantially reduce the impact of time delays.Firstly, the identified Bouc-Wen model was combined with the state observation equation of the extended Kalman filter algorithm. This comprehensive consideration of the hysteresis nonlinearity of the piezoelectric platform effectively enhanced the prediction of the platform's velocity and position. Secondly, in dealing with nonlinear problems, the extended Kalman filter algorithm traditionally employed Taylor series, which may result in poor approximations for highly nonlinear functions, introducing significant errors when estimating the Jacobian matrix. To address this, the paper employed a neural network to approximate highly nonlinear functions and subsequently estimate the image Jacobian matrix. Finally, by constructing a piezoelectric-driven experimental platform for microscopic vision, position tracking experiments were conducted. Simulation experiments demonstrate that when the input signals are sinusoidal and triangular wave signals, the mean tracking errors of the improved Extended Kalman Filter algorithm are 0.199 μm and 0.132 μm, respectively, while the mean tracking errors of the Extended Kalman Filter algorithm are 0.692 μm and 0.513 μm, respectively. The results validate the superiority and feasibility of the improved algorithm.
Jun. 25, 2024Vol. 32 Issue 12 1868 (2024)

Wei HU, Jizhu LIU, Tao LI, Feiyu CHEN, and Liguo CHEN
Aiming at the problem that the static performance of the closed rectangular hydrostatic air-bearing guide is poor and the mainstream optimization design method is time-consuming, this paper quickly optimized the design of a closed rectangular hydrostatic air-bearing. First of all, the simulation model of rectangular air-bearing was constructed by using FLUENT software, and the simulation calculation was carried out by using this model to analyze the effects of different throttle hole distribution positions and the number of throttle holes on the static performance of rectangular air-bearing, and determine the optimal throttle hole distribution position and the number of throttle holes. Then the curves of the throttle structural parameters and the bearing capacity, stiffness and air consumption of the air-bearing were analytically fitted by the response surface optimization design method, and the optimal design parameters of the rectangular air-bearing were quickly obtained by combining with the response surface curve diagram. The results show that the optimized structural parameters of the bearing capacity and stiffness are increased by 11.27% and 80% respectively, and the gas consumption is reduced by 15.86%. Finally, experimental verification is carried out, and the curves of the experimental test values and simulation values are basically fitted consistently, which demonstrates the reliability and accuracy of the method in the design of structural parameters of the gas-static bearing. This paper has important reference value for the rapid design optimization of rectangular hydrostatic bearings.
Jun. 25, 2024Vol. 32 Issue 12 1879 (2024)
Chengxin ZHENG, Xiaoqing SUN, Zhihong SUN, Yijie MIAO, and Xiusong HOU
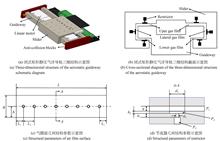
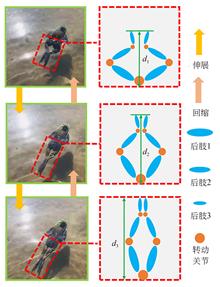
Inspired by the movement process and symmetrical structure of the hind limbs of frogs. A compliant tool guide platform that combines long stroke and high working frequency was proposed. The problems of short working stroke of the direct drive type and low working frequency of the amplified type in the tool guiding platform were solved. First of all, a preliminary model of the compliant guide platform was proposed. The lengths of important rods were determined. In the second place, multi-objective optimization design was carried out on the preliminary model using finite element analysis. And the entropy weight method and the distance between superior and inferior solutions (TOPSIS) were used to rank the scores. On this basis, the structure was further optimized for the multi-operational topology using finite element analysis. In the end, the test prototype was machined for experimental testing. The finite element analysis and experimental results show that the amplification ratio of the guide platform is 4.67. And the maximum stroke can reach about 90 μm. The first-order natural frequency is 1 765 Hz. The results of experimental tests on amplification ratio and natural frequency indicate that the proposed tool guide platform is capable of achieving long stroke and high frequency motion. And the X-axis parasitic error is 0.002 2%. This can be seen as the presence of low parasitic displacements in the guide platform. At the same time, the resolution of the guide platform can reach the sub-micron level. And the trajectory tracking error is about 2%. Combining the simulation and experimental test results, the proposed compliant tool guide platform can achieve precision guided motion.
Jun. 25, 2024Vol. 32 Issue 12 1891 (2024)
Runhong XIN, Ran ZHANG, Jinkui CHU, Wenzhe GONG, Yunpeng LI, and Xiaoou CHENG
This paper proposed a method to observe the celestial polarization pattern and the coordinate of zenith through Snell’s window, which consequently yields the navigation information of the carrier, i.e., yaw angle, roll angle, and pitch angle. A fish-eye lens and an imaging polarimeter were installed on the carrier to capture the sky and obtain the celestial polarization pattern. First, a pinhole imaging model was established to obtain both the internal and external parameter matrices of the camera and the distortion coefficients of the lens. A distortion correction was applied to the polarization pattern to obtain the solar meridian characteristic region. A Canny operator was used to detect the edge of the characteristic region, after which a Hough line detection algorithm was used to calculate the angle between the solar meridian and the carrier's axis, yielding the Yaw angle. Second, the relationship between incidence angles and the error of polarization angle was abstracted as a function through experiments. Error compensation based on the function was performed to reduce the measurement error of the polarization angle caused by changes in the incident light polarization state of the fish-eye lens, hence improving the accuracy of measuring the angle between the solar meridian and the carrier axis. Third, the grayscale threshold detection algorithm was used to calculate the coordinates of the zenith in the image, and therefore the roll and pitch angles of the carrier. The accuracy of the algorithm was verified through experiments. Lastly, an experimental platform was constructed to simulate an underwater environment. Results show that the mean absolute error of the yaw angle calculated by this method is 0.530 3°. Within the range of [-50°, 50°], the mean absolute error of the roll angle and pitch angle are 0.754 4° and 0.621 3°, respectively, which meets the accuracy requirements of underwater navigation.
Jun. 25, 2024Vol. 32 Issue 12 1801 (2024)

Zhanhua ZHANG, Xin CAO, Weihao ZHAN, Bo DONG, Shengli XIE, and Yulei BAI
The resolution of phase-contrast optical coherence elastography (PC-OCE) is constrained by the bandwidth of the system's light source, leading to poor quality in tomographic strain imaging. This limitation significantly hinders the practical implementation and advancement of PC-OCE. This study introduced a data-driven super-resolution strain measurement approach to tackle the challenge of strain reconstruction under restricted phase resolution. Firstly, according to the principle of PC-OCE, a simulation measurement model was built to obtain the required data set, which solved the problem that was is difficult to obtain the ground truth in the real measurement process. Secondly, a deep neural network was used to learn the mapping relationship between low-resolution phase and high-resolution strain through a data-driven manner, realizing the super-resolution measurement of strain. Finally, numerical validation and compression deformation loading experiments were employed to validate the efficacy of the method introduced in this study. The experimental results demonstrate that the approach presented in this study can reconstruct the strain measurement outcomes across a wide bandwidth despite operating under a narrow bandwidth output. Furthermore, the signal-to-noise ratio is enhanced by 18.4 dB and 1.45 dB in comparison to the vector method and conventional deep neural network for strain calculation. The proposed method overcomes the bandwidth limitation of the system light source, enabling super-resolution strain measurement under low-resolution phase input conditions. This advancement enhances the potential applications of phase-contrast optical coherence elastography in characterizing mechanical performance, detecting early internal damage, and other related areas.
Jun. 25, 2024Vol. 32 Issue 12 1812 (2024)
Silin ZHAO, Quanquan MU, and Dayu LI
To solve the problem of difficulty for infrared optical systems to simultaneously meet the requirements of large field of view and high resolution. the mid wave infrared staring imaging system with split field of view imaging images multiple sub fields of view at different times in the same detector. However, the system still has the drawbacks of inability to achieve seamless splicing and complex structure of liquid crystal shutter arrays. On this basis, this article proposed a new design of a large field of view mid wave infrared staring imaging system based on liquid crystal polarization gratings. By adding a rectangular stop at the first image plane and moving it backwards, the original 0.28° field of view loss was reduced to 0°.It achieved seamless splicing.The shutter array adopted a dual grating shutter structure, which eliminates the need for complex positional relationships. The liquid crystal shutter array was placed in a parallel light path to eliminate the longitudinal displacement between the main light rays caused by chromatic aberration and polarization.Using the proposed method, a mid-wave infrared staring imaging system was designed with an F-number of 3.25, a focal length of 130 mm, a wavelength range of 4.25 μm to 4.75 μm, and a full field of view diagonal of 10.8°. The MTF of each sub field of view unit is above 0.3@30 lp/mm. The final simulation results show that the system has the function of split field imaging and fine imaging quality.
Jun. 25, 2024Vol. 32 Issue 12 1824 (2024)
Ying CHEN, Lin LUO, Weiqi JIN, Hong GUO, Siyuan ZHAO, and Jianguo YANG
In order to explore the application of bionic compound eyes in the field of target positioning, we have studied the spatial target positioning method of the Tian- shaped four-aperture infrared biomimetic compound eyes imaging system with partially overlapping field of view. Based on the spatial distribution relationship of the four sub apertures, the imaging process of the Tian-shaped four-eye stereo vision was analyzed, and the conversion relationship between each sub aperture and the world coordinate system was derived. We have proposed the spatial target positioning method of the four-aperture infrared biomimetic compound eyes and an inverse imaging optical path positioning method under multiple apertures constraints. The coordinates of the target points to be located were calculated using the interleaving method and the point-direction method; By calibrating the existing four-aperture infrared biomimetic compound eyes experimental system, the relative poses of the four apertures were determined, and then we have conducted spatial target positioning experiments on the four-aperture system and some binocular subsystems. The results show that under similar aperture spatial distribution, the positioning error of Tian-shaped four-aperture for targets at a distance of 2 720 mm is 40 mm, and the error of binocular positioning is 76 mm. Compared to binocular positioning, the error of four-aperture is reduced by about twice, which can more accurately locate the target. The positioning error at 1 750 mm does not exceed 2%, and the accuracy of horizontal positioning is higher than vertical direction.
Jun. 25, 2024Vol. 32 Issue 12 1836 (2024)
Jianpu LIN, Zhencheng WU, Kunfu WANG, Zhixian LIN, Tailiang GUO, and Shanling LIN
In order to expand the adaptive learning ability of convolutional neural network in image super-resolution algorithm on multiple scale features and improve the network performance, this paper proposed an optimization structure of Transformer network based on cascade residual method for image super-resolution reconstruction. Firstly, the network adopted a cascaded residual structure, which enhanced the iterative reuse and information sharing ability of low and middle order features; Secondly, channel attention mechanism was introduced into Transformer structure to enhance network feature expression and adaptive learning capability of channel weights; Finally, the sensing module in Transformer network structure was optimized as a cascade sensing module to expand the network depth and enhance the feature expression capability of the model. Reconstruction tests of 2x, 3x and 4x magnification were carried out on Set5, Set14, BSD100, Urban100 and Manga109 data sets and compared with mainstream methods. Objective evaluation results showed that under Set5 data set with 4x magnification factor, Compared with other mainstream methods, the peak signal-to-noise ratio of the image obtained in this paper is increased by 1.14 dB on average, and the average structural similarity is increased by 0.019. Combined with the subjective evaluation results, it is shown that the proposed method has better image reconstruction effect than other mainstream methods, and the restored image texture details are clearer.
Jun. 25, 2024Vol. 32 Issue 12 1902 (2024)
Ping XIA, Ziyi LI, Bangjun LEI, Yudie WANG, and Tinglong TANG
Aiming at challenges such as low contrast, detail loss, blurring, and distortion in foggy images of traffic roads, a road traffic image dehazing method was proposed based on Wavelet DehazeFormer model.To enhance dehazing capability of the model,a Wavelet DehazeFormer network with an encoder-decoder structure was constructed. The encoder employed the DehazeFormer and the Selective Kernel Feature Fusion module (SKFF) as basic units in a cascaded manner. The encoding section consisted of three levels of such basic units to fuse the original information and post-dehazing information, capturing critical features more effectively. The middle feature layer adopted a local residual structure, incorporating the Convolutional Block Attention Module (CBAM) for different weights assigned to features of different levels. Additionally, a Content-guided Attention based Mixup Fusion Scheme (CGAFusion) was introduced to adjust features by learning spatial weights. The decoder comprised DehazeFormer and SKFF, utilizing pointwise convolution to reduce parameter count while maintaining network performance. Jump connections introduced wavelet transform to analyze feature maps of different scales, obtaining high and low-frequency features at various resolutions. This helped amplify details of the traffic fog image for enhanced texture retention in the dehazed image. Finally, the original image and the decoded output feature map were fused to gather more detailed information.Experimental results demonstrate that, in comparison with the baseline DehazeFormer network, the proposed method achieves a PSNR improvement of over 1.32 on public datasets and 0.56 on synthetic datasets. The SSIM metric is increased by 0.015 or more, and there is a substantial reduction in MSE, with a decrease of 23.15 or more. The entropy metric shows an increase of 0.06 or more. The proposed dehazing algorithm exhibits excellent performance in enhancing contrast, reducing fog-induced blurring and distortion, which preserves details in traffic fog images.This contributes to the advancement of intelligent visual surveillance and management in road traffic.
Jun. 25, 2024Vol. 32 Issue 12 1915 (2024)
Meng HE, Jiangpeng WU, Chao LIANG, Pengyu HU, Yuan REN, Xuan HE, and Qianghui LIU
The motion parameters of warhead fragment group has important significance for evaluating the damage power of ammunition. Aiming at the problems of low fragment object detection precision caused by small fragment object size, complex background information, and few fragment samples, this paper proposed a YOLOv5-FD(You Only Look Once v5-Fragment Detection) method for warhead fragment group object detection. Firstly, a small object detection layer was added at the network output layer, changing the original three-scales to four-scales, and a lightweight upsampling module called CARAFE (Content Aware ReAssembly of FEatures) was introduced in the feature fusion network to replace the original nearest neighbor interpolation upsampling, reducing the loss of small object feature information and improving the ability to extract small fragments. Secondly, the CA (Coordinate Attention) module was introduced into the feature extraction network to enhance of fragment features, weaken background information, and suppress interference from complex backgrounds. Finally, the MAML (Model Agnostic Meta Learning) algorithm was introduced during the model training process to achieve high detection performance using only few-shot fragment datasets. The experimental results show that YOLOv5-FD algorithm achieves the precision of 90.5%, the recall rate of 85.4%, and the average precision of 88.2% in the self-made fragment datasets. Compared with the original YOLOv5s algorithm, it improved by 7.1%, 7.9%, and 7.5%, respectively, effectively improving the precision of fragment object detection.
Jun. 25, 2024Vol. 32 Issue 12 1929 (2024)
Xijiang CHEN, Xi SUN, Bufan ZHAO, Qing AN, and Xianquan HAN
In order to enhance the generalization ability of the network and improve the accuracy of part segmentation, this paper proposed a method for part segmentation of point cloud considering the optimal allocation and the optimal mask. Firstly, the optimal allocation between two point clouds was defined according to Earth Mover's Distance. Then the point cloud was grouped by the Farthest Point Sampling, the significance of each point in the grouping is calculated, and the optimal mask of the point cloud was determined by the ball query to preserve the semantic information of the original point cloud. Finally, the neighborhood of a point with high significance in one cloud was replaced by the neighborhood of a point with low significance in another cloud, so as to achieve hybrid enhancement between point clouds. In this paper, the data was verified on ShapeNet data set, and the method was enhanced to PointNet, PointNet++ and DGCNN models. The mIoU increased from 83.7%, 85.1% and 85.1% to 85.1%, 86.3% and 86.0% respectively, effectively improving the effect of component segmentation.
Jun. 25, 2024Vol. 32 Issue 12 1941 (2024)
Mingzhu SHI, Bin ZAO, Yuhao SU, Xinhui LIN, Siqi KONG, and Muxian TAN
Snow degradation is complex and variable, including various snowflakes, snow spots and snow streaks. To this end, we proposed a dual attention refinement desnowing network (DARDNet). The network introduced a dimensional splitting strategy to handle two-dimensional features of channel and pixel in parallel, aiming to achieve a good trade-off between complex features and texture details. The channel attention mechanism built a module for the multiple degradation and forms a U-shaped pyramid structure to extract the depth features; the pixel attention mechanism combined the convolution to form the self-calibration module, and connected the efficient Transformer to preserve texture details; The parallel processed information streams were fused to improve the reconstruction quality of the image. Experiments were carried out on CSD, SRRS and Snow100K datasets, where PSNR reached 32.56 dB and SSIM reached 0.96 on CSD dataset. The experimental results show that our proposed method has obvious advantages in dealing with various snow degradations, which can better reconstruct the detail information and achieve satisfactory snow removal results.
Jun. 25, 2024Vol. 32 Issue 12 1954 (2024)
© Copyright 2018-2021 | Chinese Laser Press.
All Rights Reserved 沪ICP备15018463号-20