




 View fulltext
View fulltext

2024
Volume: 32 Issue 16
11 Article(s)

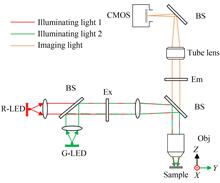
Meichen LIU, Qingyu MENG, Hongwen ZHANG, Kejun WANG, Yunhui LI, Siqi WANG, and Jiangnan WANG
The fluorescence microscopy imaging system is one of the key modules of the gene sequencer. In order to ensure the accuracy of gene sequencing, the fluorescence imaging system must be able to achieve high resolution and high-quality imaging. To meet the requirements of miniaturization, low cost, and high resolution for gene sequencers, this paper designed a dual band gene sequencing fluorescence microscopy imaging system based on narrowband LED illumination. Firstly, based on the basic principle of fluorescence microscopy imaging, an LED based illumination system was designed using the critical illumination principle. The illumination uniformity was optimized through simulation analysis, and a high-resolution and high imaging quality imaging system was designed using a beam splitter. The prototype development was completed through the design scheme, and the imaging performance was verified. According to the test results, the designed microscopy system has a resolution of 0.8 μm in the XY direction. The illumination uniformity is better than 80%, meeting the requirements of high-resolution imaging. Compared with other systems, this system has the characteristics of miniaturization and low cost, meeting the needs of gene sequencing, and has important application prospects in the development of miniaturized gene sequencers.
Aug. 25, 2024Vol. 32 Issue 16 2455 (2024)
Hao SHI, Gaoxu DENG, Zhengnan LI, Rongjun WANG, and Lidong MA
In the metallurgical industry, medium and thick plate is one of the main products, and its flatness is an important index to evaluate the quality of steel plate. The pressure leveling field also relies on manual measurement, which cannot accurately characterize the flatness of the plate. In order to improve the accuracy and efficiency of detection, a flatness measurement method based on machine vision was proposed. Based on the high-precision three-dimensional visual scanning technology, combined with the Gaussian fitting algorithm, the Gaussian coefficient was used to construct the eigenvalue, and the mapping relationship between the Gaussian eigenvalue and the actual bending height of the plate was established. The reference plane was constructed, and the distance between the point cloud coordinate value and the reference plane was calculated. The RGB color model was used to draw the shape cloud diagram. On this basis, the position of the pressure leveling pad was given. Experimental results indicate that the calculation error of the proposed method is not greater than 0.3 mm, which can realize the measurement of the central bulge or the edge warping steel plate. At the same time, the shape cloud diagram reflects the shape distribution and the position of the plate. This measurement method can accurately measure the bending of medium-thick plates and provide data support for pressure leveling.
Aug. 25, 2024Vol. 32 Issue 16 2464 (2024)

Jian LI, Xiangjie ZHAO, and Dayong ZHANG
The overseas turret-type electro optical (EO) targeting pods have been subdivided into different generations, therefore, the main technical characteristics of typical third-generation pods have been introduced. Four different evaluation criteria for measuring their integration degree have been defined: the ratio of the aperture of the optical aperture to the diameter of the turret, the cube of the aperture of the optical aperture to the weight of the system, the cube of the diameter of the pod to the weight of the system, and the ratio of the weight of the payload to the weight of the system, so as to achieve the quantitative evaluation of the functional density or technological level of the EO targeting pods of similar performances at the macroscopic level. The development status of typical equipment is introduced, focusing on the corporations of typical products such as the American MTS-B pod, Turkish ASELFLIR350 pod and the subsequent ASELFLIR400/500, Canadian MX-15D pod, French EUROFLIR410 pod and German ARGOS II HDT, etc., and their respective technical styles, characteristics and core payloads are introduced. A forward design evaluation verifies the performance of MTS-B front telescope system and ASELFLIR350 turret's optical payload. Several assimilated technical features of modern EO targeting pods are summarized: the optical-mechanical architecture of multi-band common aperture catadiopatric main system + side-axis small aperture sub-systems is gaining consensus; the laser detection technology of multiple wavelengths is increasingly inclined to the direction of active optics; composite-axis control technology based on the combination of multi-axis, multi-frame platforms and fast steering mirrors (FSM) is gaining popularity; the enhancement of target detail areas is acquiring more attention, and multi-band image fusion information processing technology is becoming more and more important.
Aug. 25, 2024Vol. 32 Issue 16 2474 (2024)

Huaan WANG, Xiaojian LI, Penghe YIN, Jiaxin SONG, Yu ZHANG, and Junsheng LIANG
With the advantages of high mechanical strength and good electrical conductivity, Ni microneedle arrays are widely used in bioengineering and other fields. By virtue of the advantages of high replication accuracy and wide adaptability, the microelectroforming technique has become a reliable method for preparing Ni microneedles. However, it is usually necessary to use photoresist template with the same thickness as that of the casting layer in the microelectroforming technique. Thick photoresist microelectroforming faces problems such as residual photoresist at the microstructure, difficulty in removing the photoresist. In order to solve the above problems, obtain Ni microneedle arrays with tip curvature radius on the nanometer scale, the fabrication process for Ni microneedle arrays based on the thin photoresist microelectroforming technique was designed and experimentally verified. First, a silicon template with arrays of pits was fabricated on (100) single crystal silicon wafers. Next, a Ni seed layer with a thickness of 200 nm was sputtered onto the surface of the silicon template. Then, a thin photoresist template of the microneedle support beam was prepared using the photolithography technique. Finally, Ni microneedle arrays were released after microelectroforming. The experimental results show that Ni microneedle arrays with an average deviation in size of 1.7 μm, an average deviation in absolute position of 1.8 μm, and an average curvature radius of 150 nm at the tip were obtained by this method without damaging the silicon template. Using RFJ-60 negative photoresist as a template for microelectroforming with a thickness of -2 μm, microneedle support beams with a thickness of -24.3 μm were successfully prepared. Ni microneedle relative dimensional error was reduced to 1% by compensating SiO2 lateral erosion into lithographic mask. Combining the microelectroforming technique and the anisotropic etching property of monocrystalline silicon, the Ni microneedle array can be prepared with high quality and high efficiency, which lays the foundation for the batch preparation of Ni microneedle arrays.
Aug. 25, 2024Vol. 32 Issue 16 2492 (2024)

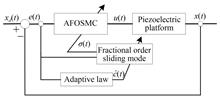
Mingchao SUN, Jiaqi PENG, and Yueming SONG
To realize the high-precision command tracking control of the piezoelectric platform, an adaptive fractional order sliding mode tracking control method was proposed in this paper to address the serious hysteresis problems. At first, the fractional order operator and adaptive law based on the Duhem model were introduced into the design of the sliding mode surface. It increased the degree of freedom variability of the sliding mode surface and achieved the adaptive adjustment of parameters. Next, an uncertainty and disturbance estimation technique was proposed to replace the traditional switching term of the sliding mode controller, which solved the chattering problem of the sliding mode controller and improved its robustness. Finally, the experimental results of the command tracking control of the piezoelectric platform show that compared with traditional PID and sliding mode control method, the tracking error of the adaptive fractional order sliding mode controller has decreased by more than 80%, and the root mean square tracking error of the piezoelectric platform based on adaptive fractional order sliding mode controller is reduced to 0.41 μm under the reference command signal at 50 Hz. Therefore, the adaptive fractional order sliding mode controller has more superior tracking performance.
Aug. 25, 2024Vol. 32 Issue 16 2504 (2024)
Tongqun REN, Rungu CAO, Guorui ZHANG, Quan SHI, Can CUI, Shuai KONG, and Xiaodong WANG
The target surface of the CMOS circuit board is a key part of the star sensor structure, and its assembly attitude affects the accuracy of the defocus distance, and then affects the imaging performance of the star sensor. Therefore, the assembly and adjustment of the target surface is an important link to ensure the imaging quality of the star sensor. At present, the assembly and adjustment of the target surface is mainly completed by manual assembly and adjustment, and there are some problems, such as low precision, poor product consistency, long cycle and so on, resulting in low rate of quality products. For this reason, an automatic assembly and adjustment equipment for the target surface of CMOS circuit board of star sensor was developed. The non-contact measurement mode was adopted, and the measurement module and fretting platform were integrated to complete the relative position and attitude measurement between the CMOS target surface and the datum surface, which solved the problem of high precision measurement in the narrow space caused by the special structure of the star sensor. The design adjustment mechanism could flip the parts at any angle and eliminate the influence of the complex layout of the system structure caused by the inconsistency between the measuring direction and the assembly direction. Finally, the accuracy of the measurement system was analyzed, and the algorithm of adjusting gasket grinding amount was developed by using local enumeration method to solve the problem of under-determination of multi-gasket grinding quantity from a single known quantity of plane attitude. The experimental results show that the system can realize the function of automatic assembly and adjustment of the target surface, and measurement repeatability of the system is 0.8′, which meets the technical requirements.
Aug. 25, 2024Vol. 32 Issue 16 2513 (2024)

Daxiang LI, Denghui LI, Ying LIU, and Yao TANG
In response to the problem of low segmentation accuracy in colon polyp images due to varying sizes, complex shapes, and unclear boundaries between polyps and mucosa, a progressive CNN-Transformer semantic compensation polyp segmentation network was proposed to improve the segmentation accuracy of colon polyps. In order to better utilize the local features from the CNN encoder and the global features from the Transformer encoder, a same-layer feature interaction coupling module was designed to adaptively fuse features from the CNN and Transformer encoders in both spatial and channel dimensions through grouped interaction coupling. Then, to address the issue of semantic loss caused by upsampling during the decoding process, a Query-based semantic compensation module was designed. This module gradually integrates and distributes image semantics through a set of learnable descriptors, effectively enhancing the network's feature discrimination capability. The experimental results show that the proposed network achieved mDice scores of 94.23%, 90.36%, 92.93%, and 80.26% on the CVC-ClinicDB, CVC-300, Kvasir, and CVC-ColonDB public datasets, respectively. The mIoU scores are 89.87%, 83.75%, 88.21%, and 72.09%, respectively. Compared to existing segmentation networks, the proposed network can effectively improve the effectiveness of polyp segmentation while ensuring its generalization.
Aug. 25, 2024Vol. 32 Issue 16 2523 (2024)
Qinglu MA, Feng BAI, Jie ZHANG, and Zheng ZOU
In order to solve the problems of vehicle autonomous positioning and navigation in the auto drive system, such as the inability to accurately estimate the body posture and the unsmooth navigation path, a positioning and navigation method based on a priori laser radar point cloud map was proposed. Using point cloud segmentation technology to separate feasible areas and potential risk sources, this paper studies the NDT (Normal Distribution Transform) point cloud registration and localization method based on optimized convergence process. The traditional A* algorithm is improved from two aspects: dynamic weight design and domain first search strategy to meet the real-time positioning and navigation needs of autonomous driving. The experiment used Baidu Apollo Autonomous Driving Development Kit (D-KIT) for multiple control experiments. When the voxel downsampling Leafsize parameter was 1 (high sampling), 1.2 (medium sampling), and 1.5 (low sampling), the localization time was reduced by 27.77%, 38.75%, and 38.30%, respectively. Four sets of navigation experiments were selected that meet the actual driving needs. After improvement, the maximum curvature of the navigation path was reduced by 80.9%, 74.9%, 65%, and 69.5%, respectively. The curvature of the navigation path remained low and stable, and the curvature data was consistent with vehicle dynamics. Provide effective methods for vehicle positioning and high-precision navigation.
Aug. 25, 2024Vol. 32 Issue 16 2537 (2024)
Gengsheng LI, and Guojun LIU
Active Contour Model (ACM) has become one of the most commonly used image segmentation tools. However, the existing algorithms are time-consuming and lead to a sharp decrease in segmentation accuracy when dealing with images with intensity inhomogeneity. Therefore, in this paper, a statistical paradigm was proposed for image segmentation by combining local image information. First, the image was modeled using a new bias field model that decomposed the gray scale inhomogeneity of the image into a component of the observed image. Compared with the traditional multiplicative bias field, the additive bias field module enabled the energy generalization to extract the texture information of the image from a new dimension. Next, a local information fusion strategy was used to compute the feature fitting maps inside and outside the contours. Finally, the statistical paradigm was utilized to portray the similarity between the feature fitting map and the original feature map. Thus, the newly designed energy generalization deals with images with complex backgrounds by utilizing hierarchical local features, global spatial consistency, and multiscale abstract representation. The experimental results show that for segmenting non-homogeneous medical images, the model in this paper requires only 50 iterations, while the other models are all over 100; the algorithm takes only 8 seconds to run, but the rest of the models are much higher than 8 seconds. At the same time, the proposed algorithm was evaluated using objective evaluation indicators: the average value of the DC indicator is 0.985 1, the average value of the FP indicator is 0.005 2, the average value of the JCS indicator is 0.970 6, the average value of the P indicator is 0.994 7, and the average value of the TP indicator is 0.975 7. The model in this paper is able to extract more information about the texture structure and is robust to gray scale inhomogeneity and initial contours.
Aug. 25, 2024Vol. 32 Issue 16 2550 (2024)
Zhenping XIA, Hao CHEN, Yuning ZHANG, Cheng CHENG, and Fuyuan HU
Addressing the issue of high computational complexity and limited extraction of spatio-temporal features in 3D convolutional neural networks for video super-resolution tasks, this paper introduced a novel lightweight video super-resolution reconstruction network based on hybrid spatio-temporal convolution. Firstly, a hybrid spatio-temporal convolution-based module was proposed to realize the enhancement of the spatio-temporal feature extraction capability of the network as well as reduction of the computational complexity. Then, a similarity-based selective feature fusion module was proposed to further enhance the extraction capability of relevant features. Lastly, a motion compensation module based on the attention mechanism was designed to mitigate the effects of erroneous feature fusion to a certain extent. The experimental results demonstrate that the proposed network can achieve a favorable balance between video super-resolution performance and network complexity, and the 4-fold super-resolution reaches 8 frames per second on the benchmark dataset SPMCS-11. The proposed network meets the requirements for fast and accurate reasoning operations on edge devices.
Aug. 25, 2024Vol. 32 Issue 16 2564 (2024)
Zhiwei DUAN, Xiaohua XIA, Pengcheng HE, and Peng HU
Machine vision is crucial for detecting surface defects on cylindrical objects. While correcting the perspective distortion of images of cylindrical objects is feasible, shooting conditions pose challenges. Cylindrical objects are often observed in tilted positions. To address distortion caused by the perspective projection of inclined cylindrical object surfaces, a method for image correction based on cylindrical surface pose estimation was proposed. This method first extracted the side edges of cylindrical images and then estimated the pose relationship between the cylindrical surface and the camera by using the cylinder radius and the system's imaging parameters. An iterative algorithm with variable step size was employed to precisely calculate the cylindrical surface pose. Subsequently, a correspondence relationship between the subdivision mesh points of cylindrical surface and the original image pixel coordinates was established. The surface was unfolded into a plane, and a correspondence relationship between the unfolded subdivision mesh points and the corrected image pixel coordinates was established. This created a mapping relationship between the corrected image pixel coordinates and the original image pixel coordinates, allowing for resampling of the original image to obtain the corrected image. Experimental results demonstrate that the average distance error of cylindrical surface pose estimation is 0.3 mm, and the average angle error is 0.60°. The average distance standard deviation of adjacent corner points of a chessboard-patterned cylindrical object surface decreases from 12.2 pixels pre-correction to 0.8 pixels after correction. The corrected image effectively identifies text on the cylindrical surface, with a measurement error of defects on the cylindrical surface not exceeding 0.1 mm. The corrected image eliminates the inclined projection distortion and "near large, far small" perspective deformation of the cylindrical surface, validating the effectiveness of the proposed method.
Aug. 25, 2024Vol. 32 Issue 16 2577 (2024)
© Copyright 2018-2021 | Chinese Laser Press.
All Rights Reserved 沪ICP备15018463号-20