




 View fulltext
View fulltext

2023
Volume: 31 Issue 24
12 Article(s)

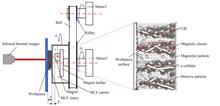
Youliang WANG, Xichun GAO, Wenjuan ZHANG, and Jiang GUO
Magnetic compound fluids (MCFs) have been shown to exhibit excellent polishing performance. However, problems with water wastage in MCF slurries during the polishing process can deteriorate their performance. This increases the costs of polishing using MCF slurries significantly, which substantially limits the application of MCF polishing technology. To address the issue of water loss in an MCF slurry, the relationships between the MCF's water content and the morphology, polishing temperature, normal pressure, and polishing quality of the MCF were investigated. The mechanism of the influence of moisture on polishing quality was also evaluated. First, the influences of different water content levels on the polishing properties of the fluid were analyzed. Additionally, the morphological characteristics of the MCF slurry before and after polishing were observed using industrial cameras. Then, the polishing mechanism of the MCF with varying water contents was examined by summarizing the internal relationship between temperature increases, the state of the MCF, and the force exerted in the polishing process as well as the quality of the resulting surface. Finally, the shortened lifespan of the MCF slurry was effectively alleviated by adding water. The following key results were obtained. (1) The initial polishing was better when the water content of the MCF polishing liquid was maintained at 45%. After 10 min of polishing, the surface roughness of the workpiece decreased from 0.410 μm to 0.007 μm using the initial MCF slurry. In contrast, it decreased from 0.576 μm to 0.173 μm using the MCF slurry that had been used for 50 min. The polishing performance of the MCF significantly decreased with increasing polishing time. (2) The ability of the MCF to recover worsened with decreasing water content in the slurry, which in turn affected its polishing performance. (3) The rate of decrease of the roughness of the polished surface after 60 min of polishing increased from 69.97% initially to 86.69% after adding water to the MCF slurry. The rate at which material was removed increased from 0.95×108 μm3/min to 1.45×108 μm3/min, and the normal force of the polishing increased from 3.7 N to 4.2 N. When water is added to an MCF slurry during the polishing process, maintaining a water content of approximately 45% can improve the long-term stable polishing ability of the slurry and extend the service life of the MCF effectively.
Dec. 25, 2023Vol. 31 Issue 24 3559 (2023)
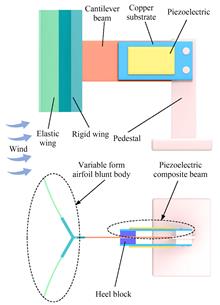
Zhonghua ZHANG, Zhe LI, Fanxu MENG, Shuyun WANG, He LI, and Junwu KAN
A novel wind-induced-vibration piezoelectric-energy harvester with a deformable airfoil-shaped bluff body is proposed in this study to solve the problems of narrow wind speed bandwidths and excessive amplitudes at high wind speeds. The harvester mainly consists of a deformable bluff body, cantilever beam, and piezoelectric vibrator. The elastic wing of the bluff body deforms at different wind speeds, thus achieving the self-adjustment of the vibration characteristics and improving the environmental adaptability of the harvester. A COMSOL finite element model of the energy harvester is established, and the effect of wind speed on the shape and vibration characteristics of the bluff body is analyzed via simulations and experiments. In addition, the effects of windward angle θ and elastic wing thickness e on the output performance of the energy harvester are determined. The results show that the wind speed bandwidth of the harvester ranges from 4 m/s to 25 m/s at a windward angle θ of 120° and an elastic wing thickness e of 0.15 mm. Furthermore, the deformation of the elastic wing becomes small when the wind speed is lower than 8 m/s. When the wind speed ranges from 8 m/s to 17 m/s, the harvester experiences a transformation from galloping to vortex-induced vibration, resulting in a decrease in the output voltage. When the wind speed ranges between 17 m/s and 25 m/s, the bluff body has an arc shape because of the excessive deformation of the elastic wing. The harvester is dominated by vortex-induced vibration, and thus, its amplitude can be effectively suppressed. The output voltage decreases with increasing wind speed. Additionally, the test results show that the harvester can yield a maximum output power of 3.78 mW at a matching impedance of 250 kΩ. Both the theoretical analysis and experimental results indicate that the proposed harvester can satisfy the requirements of high reliability, low cut-in wind speed, and broad wind speed bandwidth, as well as generate considerable electric power.
Dec. 25, 2023Vol. 31 Issue 24 3570 (2023)
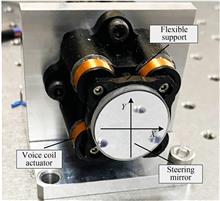
Zhibin LI, Liang LI, Jianqiang ZHANG, and Chongshang SUN
A fast-steering mirror (FSM) is a key instrument in high-precision optical systems. However, the flexible-support FSM driven by a voice coil actuator (VCA) possesses complex coupling characteristics; this leads to a complex system model and severely impacts the control performance. To address this issue, this study proposes a dual-axis integral augmented sliding-mode control method, based on system identification and model reduction. Firstly, an accurate coupled VCA-FSM model is established using the Hankel-matrix system-identification method based on pulse response. Subsequently, based on balanced realization and truncation, the high-order model is reduced, while ensuring model accuracy. Next, an integral augmented sliding-mode controller is designed, adopting a modern control-theory method and using the reduced-order model. A state observer is constructed to create the sliding-mode switching function and control law, and the sign function is improved in the control design to eliminate sliding-mode chattering. Finally, frequency-domain and time-domain performance-testing experiments are conducted on the VCA-FSM servo control-system experimental platform. The experimental results demonstrate that the proposed control method significantly improves the control performance of the VCA-FSM servo system, compared to the single-axis sliding-mode and PID control methods. The closed-loop tracking bandwidth is increased by approximately 50.3% and 251.3%, respectively, the disturbance-suppression bandwidth is increased by approximately 39.9% and 451.9%, respectively, the settling time of the step response is reduced by approximately 29.7% and 97.7%, respectively, and the tracking accuracy of the spiral line is improved by approximately 48.5% and 97.8%, respectively. Moreover, the proposed control method controls the decoupling of the VCA-FSM with strong coupling characteristics. The control method proposed in this study greatly improves the control performance of the VCA-FSM.
Dec. 25, 2023Vol. 31 Issue 24 3580 (2023)
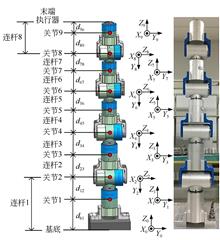
Jingkai CUI, Yufei ZHOU, Shunfeng HE, Zhenbang XU, and Mingchao ZHU
In this study, the trajectory tracking and obstacle avoidance of redundant robotic manipulators are unified as an optimization problem, and a trajectory-tracking optimizer with obstacle avoidance capability based on an improved grey wolf optimizer (IGWO) is proposed. First, the obstacle avoidance space is modeled using the bounding box method, and the GJK algorithm is used to calculate the minimum distance between the robotic manipulator and the obstacle. Second, a fitness function is derived, and a reward function for obstacle avoidance is introduced to actively reward the optimizer such that the manipulator can track the target trajectory while avoiding obstacles. Third, the grey wolf optimizer (GWO) is improved using a random dispersion strategy to improve its global search ability and solve optimization problems more accurately. Finally, the effectiveness and superiority of the proposed method were verified using a nine-degree-of-freedom redundant robotic manipulator. The experimental results show that for a circular target trajectory, the tracking error of the robotic manipulator is 0.21 mm. During the tracking process, the distance between the robotic manipulator and obstacle is not shorter than 70 mm. Compared to the GWO, the IGWO improved the tracking accuracy by 13%. The proposed trajectory tracking optimizer can perform the trajectory tracking and obstacle avoidance tasks of redundant robotic manipulators with millimeter-level accuracy; the IGWO can effectively improve the convergence accuracy of the classical GWO.
Dec. 25, 2023Vol. 31 Issue 24 3595 (2023)
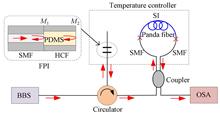
Jiale GAO, Yuqiang YANG, Xiaoguang MU, Yuying ZHANG, Yuting LI, and Yitong LI
A high-sensitivity fiber temperature sensor based on enhanced Vernier effect is proposed. The proposed sensor consists of a cascaded Fabry-Perot interferometer (FPI) and Sagnac interferometer (SI). The FPI was a PDMS cavity formed by filling polydimethylsiloxane (PDMS) into hollow-core fiber (HCF), and SI was formed by fusing a section of Panda fiber inside a single-mode fiber ring. FPI and SI have opposite temperature responses. With increasing temperature, the interference spectrum of FPI will red-shift, whereas that of SI will blue-shift. Therefore, when FPI and SI are cascaded, an enhanced Vernier effect will be generated, with a temperature sensitivity much greater than FPI or SI alone. The magnification of the enhanced Vernier effect is significantly larger than that of the ordinary Vernier effect. Experimental results show that the sensitivity of the sensor is -57.85 nm/℃ in the temperature range of 36–39℃, which is 44.8 and 30.8 times that of FPI and SI alone, respectively. The sensitivity magnifications are 2.56 and 1.66 times those of ordinary Vernier effect, respectively. The sensor has the advantages of high sensitivity, good stability, low preparation cost, and very good application prospects.
Dec. 25, 2023Vol. 31 Issue 24 3531 (2023)
Xiaoling WANG, Yafei ZHAO, Baolin LIU, Zijian ZHANG, and Qiwei WANG
Photonic crystal fibers (PCFs) use periodic air hole structures to achieve light conduction, which is insensitive to space radiation. However, problems of high splice loss and low splice strength occur when the PCF splices with a PMF in the aerospace field. Therefore, investigating the fusion splicing between the PCF and PMF is crucial. First, the mechanism of splice loss between the PCF and PMF is analyzed. Next, the relationships of the splice loss with splice power and splicing time are derived via finite element simulation. The results are verified through splicing tests. Based on these, the effects of splice power and splice time on the tensile strength of splicing is emphasized, and the optimal splice power and splice time are obtained experimentally. Finally, the splicing quality is further improved by enhancing the quality of the fiber ends, shifting the heating position, multiple heating, and optimizing the splice parameters. The splicing experimental results show that the average splice loss reaches 0.82 dB, both lower than 1 dB, and the average mechanical strength is 139 kpsi, both higher than 100 kpsi. These values satisfy the requirements for low loss and high reliability of fiber fusion splicing in space applications.
Dec. 25, 2023Vol. 31 Issue 24 3540 (2023)

Lirong ZHAO, Guangfu YUAN, Dong WU, Qun GAO, and Xiaoxun WANG
The use of a theodolite for real-time velocity calculation has always been a challenge in the field of measurement and control. To improve the real time and high accuracy of theodolite solutions, the laser ranging optoelectronic theodolite project has proposed an optimal uniform approximation polynomial velocity solution method through repeated experiments, which ensures both real-time and accurate velocity. First, a single station theodolite and laser ranging are used to obtain the spatial position of the target, and an improved least squares method is used to fit and filter distance measured by the laser. Then, by solving the velocity model, the initial velocity value is calculated. When using polynomials to approximate the true value of velocity, using conventional expressions can result in significant computational errors. To reduce computational errors, polynomials are combined with cubic Chebyshev polynomials to obtain the optimal uniform approximation polynomial for calculating the velocity function. The optimal uniform approximation polynomial velocity function uses the cubic finite difference method to identify the velocity outliers and obtain real-time and high-precision target velocity values. The indicators of laser-ranging theodolite speed measurement include real time ability (delay<100 ms) and accuracy (error<1 m/s). The speed measurement value of GPS loaded on the UAV is taken as the true value, and multiple algorithms are used to calculate the target speed. The test results show that the Gaussian function method for speed calculation has good real-time performance; however, the speed measurement accuracy is >1.5 m/s. The Kalman method has good accuracy in calculating velocity; however, owing to the use of a large amount of historical data, the velocity value lags behind. The speed calculated by the optimal uniform approximation polynomial method in this study has good real-time performance and a delay of 50 ms. The mean square deviation of speed accuracy is 0.8 m/s, which meets the equipment’s indicator requirements.
Dec. 25, 2023Vol. 31 Issue 24 3549 (2023)
Wenjuan GU, Can DING, Jin WEI, Yanchao YIN, and Xiaobao LIU
Aiming at the problem that images taken in low-light environments are affected by the strength of illumination, which leads to poor image quality, this study proposes a low-light image enhancement algorithm based on the fusion of bilateral filtering MSR and AutoMSRCR. First, the brightness of the original low-light image is enhanced using the MSR algorithm based on bilateral filtering in HSV color space. As a result, a brightness-enhanced image with the original color information is obtained. Then, the CLAHE algorithm is used to enhance the details of the brightness channel based on the Lab color space, and a detail-enhanced image is obtained. Finally, the AutoMSRCR algorithm is used to process the original low-light image and perform weighted fusion with the detail-enhanced image to obtain the final enhanced image. Using UCIQE, AG, SD, and IE as evaluation indexes, the proposed algorithm outperformed the MSR, MSRCR, CLAHE, and GAMMA algorithms. The results show that the proposed algorithm optimized image quality with UCIQE, AG, SD, and IE reaching values of 0.472 1, 12.674 2, 0.263 2, and 7.637 9, respectively. The obtained image contains more color information, is clearer, the image contrast is natural look, and the edge texture information of the image is more complete. That is, images enhanced by this algorithm are of the highest quality. This study provides a feasible method for low-light image enhancement.
Dec. 25, 2023Vol. 31 Issue 24 3606 (2023)
Changyuan LIU, Ting LI, and Chaofeng LAN
In this study, a fine-grained remote sensing ship open-set recognition model is designed to address the limitations of traditional deep convolutional neural networks in fine-grained classification of ship images. First, a STN module based on attention mechanism is introduced before the feature extraction network to filter background information. In addition, a multi-scale parallel convolution structure is added after the STN module to enhance the feature extraction ability of the network for local regions of different scales. The extracted features are input into the base and meta-embedded branches, to increase inter-class variance and reduce intra-class variance, strengthening the model's learning of the tail class small samples concomitantly. Finally, the classification results of the two branches are fused; known and unknown classes are distinguished according to the set threshold; and known classes are subdivided. Four types of openness experiments were conducted on the FGSCR-42 datasets with balanced and unbalanced distributions. The results show that the average accuracies of the four types of openness in the balanced distribution dataset are 90.5%, 86.3%, 85.7%, and 85.1%; the corresponding average accuracies of the unbalanced distribution dataset are 90.0%, 85.1%, 84.3%, and 84.1%. Compared with the current mainstream ship recognition methods, the proposed method has higher recognition accuracy and better generalization ability.
Dec. 25, 2023Vol. 31 Issue 24 3618 (2023)
Xiaohua XIA, Qian ZHAO, Huatao XIANG, Xufang QIN, and Pengju YUE
Conventional SIFT image feature extraction methods have difficulty in extracting features from the defocused blurred area of multi-focus images. As a result, common features between images are local and few, leading to poor accuracy in multi-focus image registration, which seriously affects the quality of subsequent image fusion and 3D reconstruction. Based on analyzing the uncertainty of feature extraction from the defocused blurred areas of images, a feature extraction method is proposed for the defocused blurred area of multi-focus images. First, features are extracted from the focused clear area of multi-focus images. Subsequently, the features in the corresponding defocused blurred area are extracted using optical flow tracking, thereby avoiding the uncertainty of directly extracting features from the defocused blurred area. Experimental results show that the proposed method displays good feature extraction ability and accuracy in the defocused blurred area, significantly increasing the number of features matches. Feature extraction error ranges between 0.03-0.39 pixels, which is better than the 0.21-1.71 pixels of existing methods. This indicates a reduction in the uncertainty of feature extraction from the defocused blurred area, making it suitable for multi-focus image registration.
Dec. 25, 2023Vol. 31 Issue 24 3630 (2023)
Photovoltaic hot spot detection method incorporating knowledge distillation and attention mechanisms
Shuai HAO, Yingqi WU, Xu MA, Tong LI, and Haiying WANG
A detection algorithm combining knowledge distillation and attention mechanism is proposed to solve the problem that multi-scale target of the hot spot fault of photovoltaic panel in a complex environment leads to difficult detection. To efficiently extract and retain fault feature information, a module that integrates higher-order spatial interaction and channel attention was designed to improve the expression ability of fault feature information. To further enhance the ability of expressing target information in a complex background, an attention module combining channel and location information was constructed to improve the recognition accuracy of fault location information. The parameters of teacher network were transferred to student network by knowledge distillation, and the detection accuracy of student network was improved without adding any complexity. A focal-CIoU loss function was introduced to accelerate network convergence and improve detection performance. In verifying the effectiveness of the proposed algorithm against eight classical algorithms, the experimental results show that the proposed algorithm has the highest detection accuracy (84.8%), and the detection speed can reach 142 FPS for images with a resolution of 640×512.
Dec. 25, 2023Vol. 31 Issue 24 3640 (2023)
Wei CAI, Bo JIANG, Xinhao JIANG, and Zhiyong YANG
To address the difficulties in constructing an infrared image dataset from measurements and the high cost of testing and production, this study proposes a generation countermeasure VTIGAN for unpaired training samples to achieve high-quality image conversion from visible-to-infrared in different scenarios. VTIGAN introduces a new generator inspired by the transformer module to learn the mapping relationship of image content, whereby image style conversion is realized by reorganizing the characteristics of the target style. PathGAN is used as a discriminator to strengthen the image detail information generation ability of the model. Finally, four loss functions, namely, resistance, multi-layer contrast, style similarity, and identity losses are combined to constrain the model training process. VTIGAN was compared with other mainstream algorithms in a wide range of experiments on visible infrared datasets. Three evaluation indicators, namely, peak signal-to-noise ratio (PSNR), structural similarity (SSIM), and Fréchet inception distance (FID), were used for quantitative and subjective qualitative evaluation. The experimental results show that VTIGAN improves PSNR, SSIM, and FID by 3.1%, 2.8%, and 11.3%, respectively, compared with the suboptimal UGATIT algorithm, which effectively realizes image conversion from visible light to infrared under the condition of unpaired training samples, demonstrating stronger anti-interference ability for complex scenes. The generated infrared images have high definition, complete details, and strong realism.
Dec. 25, 2023Vol. 31 Issue 24 3651 (2023)
© Copyright 2018-2021 | Chinese Laser Press.
All Rights Reserved 沪ICP备15018463号-20