





 View fulltext
View fulltext

2023
Volume: 31 Issue 16
13 Article(s)

Baoping LI, Hengyi QI, Manli WANG, and Po WEI
The performance of deep-learning-based equipment fault detection systems relies heavily on the size and class diversity of the sample set. Because it is difficult to collect all types of fault sample comprehensively in industrial production, there is a demand for sample set augmentation. A fault dataset amplification method combining 3D modeling with an improved cycle generative adversarial network (CycleGAN) is proposed. First, various equipment malfunction images generated by 3D modeling software are applied to the CycleGAN network training to guide it in generating pseudo-real images to address the problem of insufficient samples and an uneven distribution. Second, a U-ResNet generator is used in the CycleGAN network to solve the problem of edge blurring and gradient vanishing during network training. The method was applied to the task of belt conveyor deviation detection. The experimental results show that the contour structure of the method converges quickly in the training process and has good timeliness in comparison with other amplification methods. The accuracy rate of the method is 98.1% when applying to the target detection network, which is 4.5% higher than that of the original real dataset. It meets the basic requirements of a balanced distribution of amplified datasets and high image quality.
Aug. 25, 2023Vol. 31 Issue 16 2406 (2023)
Yizhe MA, Shiyong WANG, Teng LEI, Bohan LI, and Fanming LI
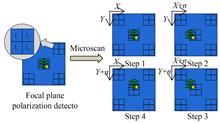
The imaging resolution of a polarization detection system in the focal plane is lower than the actual resolution of the detector owing to the influence of the detector structure. In this study, micro-scanning is used to obtain the micro-displacement frame sequence without changing the optical system structure, and an improved convex set projection (POCS) algorithm is proposed to improve the imaging resolution of the polarization imaging system. In the algorithm, the obtained polarization microscan image sequences were first separated through angle detection, and the same group of angle detection image sequences were used as the input. Second, displacement matching and convex set projection iteration were conducted to initially reconstruct high-resolution images. Thereafter, the images were grouped into sliding window non-neighborhood clustering, and the dimensionality of the clustered images was reduced through principal component analysis. Finally, each one-dimensional information was regarded as a time sampling function, and soft threshold denoising was conducted in the wavelet domain. Experiments demonstrate that this algorithm can effectively improve the anti-noise performance of the conventional POCS algorithm, improve the imaging resolution of the high-resolution focal plane polarization detection system, increase the structural similarity coefficient by 0.02, increase the peak signal-to-noise ratio by 1 dB compared with similar algorithms, and achieve higher noise robustness.
Aug. 25, 2023Vol. 31 Issue 16 2418 (2023)
Sen WANG, Yang ZHU, Yinhui ZHANG, Qingjian WANG, and Zifen HE
Video-Super Resolution (VSR) aims to reconstruct low-resolution video frame sequences into high-resolution video frame sequences. Compared with single image super-resolution, VSR usually relies on the height-dependent information of neighboring frames to reconstruct the current frame because of the added information of temporal dimension. How to align adjacent frames and obtain highly correlated information between frames is the key issue of VSR task. In this paper, the VSR task is divided into three stages: deblurring, alignment, and reconstruction. In the deblurring stage, the current frame is pre-aligned with adjacent frames to obtain feature information highly related to the current frame, and the details of the current frame are enhanced to achieve more feature information extraction in the initial stage. In the alignment stage, the highly correlated information in adjacent frames is used to further strengthen the feature information in the current frame by performing a secondary alignment operation on the input features. In the reconstruction stage, raw low-resolution frames are aggregated to provide more feature information at the end of the network. In this paper, we use Multi-Layer Perceptron (MLP) instead of the traditional convolution operation to construct a feature extraction module, and also perform a secondary alignment of the generated feature information to refine the image features to obtain better video frame reconstruction results. The experimental results show that the proposed algorithm achieves a higher accuracy of video frame sequence reconstruction on a variety of publicly available datasets while achieving a lower number of network parameters and a more coherent video sequence reconstruction performance.
Aug. 25, 2023Vol. 31 Issue 16 2430 (2023)

Huabiao YAN, Fangqi XU, Lü'er HUANG, Cibo LIU, and Chuxin LIN
The goal of Multi-view stereo (MVS) Reconstruction is to reconstruct a 3D model of a scene based on a set of multi-view images with known camera parameters, which is a mainstream method of 3D reconstruction in recent years. This paper provides a algorithm evaluation comparison for the latest hundreds of MVS methods based on deep learning. First, we sorted out the existing supervised learning-based MVS methods according to the reconstruction process of feature extraction, cost volume construction, cost volume regularization and depth regression, focusing on the summary of improvement strategies in the two stages of cost volume construction and cost volume regularization. For the unsupervised MVS methods, we mainly analyzed the design of the loss terms of each algorithm. It is classified according to its training mode. Secondly, we summarized the common datasets of MVS methods and their corresponding performance evaluation indexes, and further studied the introduction of strategies such as feature pyramid network, attention mechanism, coarse-to-fine strategy on the performance of MVS networks. In addition, it introduced the specific application scenarios of MVS methods, including digital twin, autonomous driving, robotics, heritage conservation, bioscience and other fields. Finally, we made some suggestions for the improvement direction of MVS methods, and also discussed the future technical difficulties and the research directions of MVS 3D reconstruction.
Aug. 25, 2023Vol. 31 Issue 16 2444 (2023)

Yuebo MENG, Fei WANG, Guanghui LIU, and Shengjun XU
Remote sensing objects have large scale differences. In order to solve the problems that they are prone to lead to difficulties in fine granularity multi-scale feature extraction and weak prediction part of effective representation under complex background interference, a multi-scale remote sensing object detection method (MFC) for multivariate feature extraction and characterization optimization based on the idea of anchor-free is proposed. In the feature extraction part, a multivariate feature extraction module (MFE) is designed to mine multi-scale features at the fine granularity level, expand the receptive field through grouping operation and cross group connection, enhance the combination effect of multiple feature scales, and further strengthen the focus on small objects by combining context information; The deep and shallow features are fully integrated by the deep layer aggregation structure to obtain a more comprehensive feature expression. In the prediction part, a characterization optimization strategy (COS) is proposed, which uses elliptical mapping to optimize tags to adapt to remote sensing targets with large aspect ratio. And a Coordinate-Pixel attention is designed to focus on multi-scale object channels, positions and pixel information, reduce complex background interference, and make effective information prominent. Ablation and contrast experiments were conducted on DIOR, HRRSD and RSOD datasets. The experimental results showed that the mAP of MFC model reached 70.9%, 90.2% and 96.9% respectively, which was superior to most existing methods. It effectively improved the problems of false detection and missing detection, and had strong adaptability and robustness.
Aug. 25, 2023Vol. 31 Issue 16 2465 (2023)

Chen GUO, Shengli CHANG, Wenjie ZHANG, Guangyi XIAO, Fei WANG, and Tong BAO
Measuring the ejected particle’s velocity is crucial for rocket motor development design. Because of the intense light background radiation of the rocket motor flame, the conventional filter device and moving object detection algorithm cannot be used. To address these problems, this study presents a novel quantum filter technology. Considering the characteristics of quantum high signal-to-noise ratio and low background noise, taking the atomic filter as the core, the ultra-narrow band quantum filter technology is applied to particle image velocimetry (PIV), which makes up the quantum filter PIV system. The filter bandwidth is on the order of magnitude of MHz to GHz. Simultaneously, based on the quantum filter PIV system, a new virtual particle image tracer algorithm based on image gray cross-correlation is proposed. This algorithm obtains the trajectory of particle motion by tracking and marking to characterize the particle motion in the flow field. The results indicate that the quantum filter technology exhibited strong suppression of complex background interference, the signal-to-noise ratio was improved by 30 dB compared with the conventional filter device, and the filtering effect was significant. The algorithm had high accuracy, the particle velocity measurement error was less than 0.5 m/s, and the calculation measurement accuracy was better than 0.06%. The relevant system had already been used in national research institutes.
Aug. 25, 2023Vol. 31 Issue 16 2352 (2023)

Yufan JIA, Xianglong ZHU, Lei YANG, Renke KANG, and Zhigang DONG
The material removal rate of a quartz wafer by fixed abrasive lapping is difficult to predict; therefore, a model of the material removal rate based on contact mechanics and a generalized regression neural network (GRNN) is proposed. First, according to the ductile–brittle material removal mechanism and the simplified form of micro-contact between the abrasive block and wafer, an ideal material removal rate model was established by using calculus and the force balance principle. Then, a three-factor four-level orthogonal test was performed using the microelement method. The mapping relationship of the lapping fluid flow, lapping fluid concentration, lapping disk speed, and material removal rate correction coefficient was analyzed using the GRNN. The material removal rate model was further improved. Finally, to validate the material removal rate model, a lapping experiment was conducted. The lapping disk speed was set to 20 r/min, lapping fluid concentration to 5 wt.%, and lapping fluid flow rate to 36 ml/min. The predicted and actual values of the wafer material removal rate were simulated and measured under different lapping pressures and relative velocities. It was found that the increase in lapping pressure and relative velocity accelerates the removal of the wafer material. The predicted value of the material removal rate model exhibited the same trend as the actual value, and the error of model was 8.57%. The material removal rate model meets the demand for predicting the material removal rate of quartz wafers in fixed abrasive lapping.
Aug. 25, 2023Vol. 31 Issue 16 2362 (2023)
Zhiyong YU, Zhaoyao SHI, Huiming CHENG, Bo YU, and Lintao ZHANG
The test bench of lost motion of a precision reducer is a non-standard piece of equipment, and there has been no systematic research on its precision characteristic. Therefore, verification regulation for evaluating the metrological performance of such a test bench is lacking. To evaluate the accuracy characteristic of the test bench of lost motion of a precision reducer, an accuracy evaluation method is proposed. First, the structure of the test bench is analyzed, and the main error sources that affect the precision of the test bench are determined. These error sources include the measurement error of the torque sensor, measurement error of the angle sensor, friction torque of the torque measurement chain, and elastic torsion angle of the angle measurement chain. Second, the function mechanisms of these error sources are studied, and a method of converting torque error into angle error is proposed through a hysteresis curve so that all types of error are unified as an angle error. Then, the concept of local linearization of the hysteresis curve is proposed to realize the simple calculation of torque error mapped to angle error. Finally, a method of evaluating the accuracy of the test bench is given according to the mathematical expression of lost motion. Testing was conducted, and the experimental results indicate that the test error of geometric lost motion is ±0.04', test error of elastic lost motion is ±0.06', and test error of total lost motion is ±0.04'. Consequently, the accuracy of the test bench of lost motion meets the test requirements, and the method proposed is effective for evaluating the accuracy of the test bench. In addition, the test accuracy can be improved by testing several places within one rotation of the output terminal of the precision reducer.
Aug. 25, 2023Vol. 31 Issue 16 2372 (2023)
Jun YANG, Wei FAN, Kuo HAI, Yunfei ZHANG, and Wen HUANG
Magnetorheological finishing (MRF) is an important process for reducing surface damage and efficiently suppressing the surface error in conical mirrors. However, because of the serious distortion and complex distortion law of the removal function for MRF of conical surfaces, existing methods have failed to establish the removal function model directly and effectively, resulting in a low surface convergence efficiency. In this study, the influence mechanism of the conical curvature effect on the distortion of the MRF removal function was analyzed. In addition, the analytical rule of the normalized characteristic parameters of the removal function for the mean curvature was studied. Furthermore, the removal function deduction scheme from plane to cone was established. This method integrates the evolution laws of the length and width of the conical MRF removal function, volume removal rate, and peak removal rate into the deduction to more comprehensively reflect the distortion characteristics of the MRF removal function under the conical curvature effect. It avoids the measurement of physical and chemical characteristic parameters and the solving of complex equations and nonlinear problems, providing an effective, low-cost method for the removal function deduction of conical MRF under actual conditions. The results of repetitive spot sampling experiments show that the deduction errors of the characteristic parameters of the conical removal function are between 3.20% and 12.02%, demonstrating the strong applicability of the proposed deduction method.
Aug. 25, 2023Vol. 31 Issue 16 2383 (2023)
Tongqun REN, Yongsheng SANG, Rungu CAO, Han WU, and Xiaodong WANG
Suspended pendulum accelerometers are widely used in the aerospace field because of the advantages of miniaturization, a large measuring range, and impact resistance. The precision assembly of the base and pendulum components is still mainly manual, with poor assembly accuracy, unstable suspension tension, unguaranteed welding parameters, and poor solder joint quality. These result in a low product yield. To address this, a set of automatic assembly and welding equipment for the pendulum accelerometer base components was developed in this study. According to the characteristics of the parts and the assembly environment, using visual and force feedback control realizes the automatic adjustment of the posture and suspension tension of the base and swing components. Control software for the layered architecture was developed based on the C++ language. A welding process and welding strategy controlled by temperature feedback were designed, and they were verified by finite element simulation and a welding experiment. The experimental results show that the equipment can realize automatic assembly and welding functions, and the assembly accuracy of the base assembly meets the requirements of the technical indicators, which improves the product quality.
Aug. 25, 2023Vol. 31 Issue 16 2395 (2023)
Zhiwei XIA, Shuo WANG, Xiaolong YI, Yupeng WANG, and Wei FANG
The performance of on-orbit payloads is inevitably degraded. Field calibration is a primary method of on-orbit radiometric calibration for some satellite payloads, and its accuracy mainly depends on how accurate the surface reflectance is. This study introduces the working principle and system composition of the Automatic Observation System of Surface Reflectance, and unattended, automated, and continuous spectral surface reflectance measurements were conducted at the Dunhuang Radiation Calibration Field. The short- and long-term stabilities of the surface reflectance data acquired simultaneously were compared and analyzed using the standard whiteboard and irradiance methods, respectively. The surface reflectance is directly traceable to the reflectance of the standard whiteboard, and the data processing method reduces the calibration transfer link. The results are as follows. The mean deviation of short-term measurement of the surface reflectance by the standard whiteboard method is 0.130%. For the long-term measurement, the mean deviation of the 350-600 nm band is 4.996%, and the mean deviation of the 600-2 500 nm band is 2.104%. The standard whiteboard method is reasonable and feasible for measuring the surface reflectance, and the figure of reflectance is continuous and smooth, and it has less fluctuation. The accuracy of reflectance can be improved by regularly cleaning the standard whiteboard. The short-term measurement of the irradiance method is similar to that of the standard whiteboard method; the mean deviation of the 350-1 900 nm band is 0.236%, and the mean deviation of the 1 900-2 500 nm band is 0.443%. For the long-term measurement, the overall drift of the reflectance is small, with an average drift of 0.735%. However, there is a disadvantage of large local noise in the reflectance curve. The two methods can be combined to obtain accurate surface reflectance data.
Aug. 25, 2023Vol. 31 Issue 16 2319 (2023)
Jinghao SUN, Zhaohua YANG, Yun WU, Ling'an WU, and Yuanjin YU
The influence of chromatic aberration in a spectral imaging system leads to spectral overlap of an image. This study combines single-pixel imaging and computational ghost imaging in a spectral imaging system, with an achromatic lens of 900-1 700 nm focal length to correct for chromatic aberration. First, the chromatic aberration of achromatic lenses made of different materials was calculated, and a suitable lens was selected accordingly; its aberration-correction was improved by an order of magnitude compared with other lenses. Second, the effects of chromatic aberration on spectral imaging systems and the differences between single-pixel imaging and computational ghost imaging were analyzed. Finally, two spectral imaging systems were compared through simulation and experimental analysis. The experimental results indicate that in the 900-1 700 nm wavelength range, the single-pixel spectral imaging system based on an achromatic lens achieves better image reconstruction results, with peak signal-to-noise ratio (PSNR) ]and structural similarity (SSIM) improvements of 3.93 dB and 0.96%, respectively. Simulations and experiments verify that the near-infrared single-pixel spectral imaging system based on an achromatic lens performs better than computational ghost spectral imaging.
Aug. 25, 2023Vol. 31 Issue 16 2333 (2023)
Yingling PAN, Rongyi JI, Qin QI, Meng GAO, and Weihu ZHOU
To solve the demands for high-speed real-time precision ranging in industrial field measurement, various high-speed and high-precision laser ranging systems have been designed and developed. The design of dual ruler frequency synchronously-modulated laser and dual signal synchronous detection improves the measurement speed of the system to meet the needs of high-speed ranging. The under-sampling method applied to the high-frequency signal phase detection has been analyzed and proved effectively, which considerably reduces the complexity of the phase detection processing circuit. The integrated high-speed laser ranging system, which uses 201 MHz+3 MHz dual rule-modulation laser source and a sampling frequency of 40 MHz, combining with optical transceiver system and signal solution circuit. The measurement speed and measurement accuracy of the laser ranging system were tested. The experimental results indicate that the measurement speed of the measurement system can reach 62 times/s, and the ranging accuracy can reach ±0.2 mm. The real-time measurement performance of the system with high speed and high accuracy is effectively verified, which can be used for high-speed ranging systems such as high-precision laser scanners and dynamic tracking measurement
Aug. 25, 2023Vol. 31 Issue 16 2343 (2023)
© Copyright 2018-2021 | Chinese Laser Press.
All Rights Reserved 沪ICP备15018463号-20