




 View fulltext
View fulltext

2022
Volume: 30 Issue 11
13 Article(s)

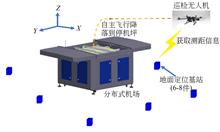
Yingchun ZHONG, Wenxiang ZHANG, Bo WANG, Heer HUANG, and Huiqing HE
The electrical inspection of unmanned aerial vehicles (UAVs) during their autonomous landing at distributed airports is difficult, particularly when the landing cannot be performed accurately, safely, and reliably owing to unsatisfactory light conditions. In this study, a touch-down navigation system for inspecting UAVs was developed. A set of systematic strategies for landing UAVs at distributed airports was proposed, as well as a novel criterion for selecting the landing strategy. First, a touch-down navigation system was established, which included an inspecting UAV, as well as ultrawide band (UWB) positioning modules on the ground and at distributed airports. Second, based on an open-source flight control system, an exclusive landing flight controller was designed and embedded into the UAV, and a novel speed controller and algorithm for landing were designed. Third, an evaluating criterion for the landing strategy was proposed, and systematic landing strategies were proposed to accommodate challenging circumstances. Experimental results indicate the following: The landing error is within 0.3 m, and the reliability is 100%; the touch-down navigation system can guide the UAV to land safely and accurately when one or two UWB modules on the ground are disabled; each landing strategy presents its own advantages and can accommodate different landing circumstances. The touch-down navigation system can satisfy the requirements of UAVs for autonomous landing, and the proposed landing strategies significantly improve the landing reliability, thus providing a foundation for the construction of autonomous UAV systems intended for power grid inspection.
Jun. 10, 2022Vol. 30 Issue 11 1362 (2022)
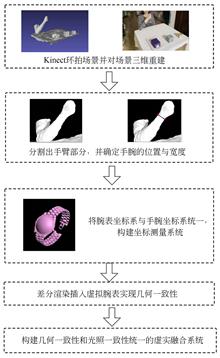
Jiawei TENG, Yan ZHAO, Aijia ZHANG, Shigang WANG, and Xiaokun WANG
With the rapid development of three-dimentional technologies, geometric and illumination consistency play an important role in the realistic rendering of virtual objects superimposed on real scenes. In order to construct the coordinate measurement system of real and virtual scenes of a stereo camera, realize the geometric and illumination consistency in real fusion, and improve the realism of virtual-real fusion, a geometric consistency virtual-real fusion method was proposed. At transformation from three to two-dimensional space was used for detailed calculation of the geometric relationship between a virtual object and real scene. Following this, a two-dimensional affine transformation was applied to process the two-dimensional images for a more accurate calculation. Finally, combined with the illumination consistency estimation, the virtual object was accurately inserted into the real scene using the differential rendering method to realize virtual-real fusion. The experimental results show that the virtual object can be fused into the real scene completely in terms of size and volume. The geometric consistency after fusion is increased by more than 15%. This verifies the effectiveness of the method and lays a foundation for applications of augmented reality.
Jun. 10, 2022Vol. 30 Issue 11 1374 (2022)
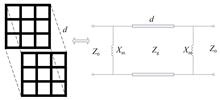
Dunwei LIAO, Yuejun ZHENG, Hao CUI, Tie CUN, and Yunqi FU
An analysis model is established and a theoretical formula is deduced to analyze the electromagnetic shielding enhanced by a double-layer micro-nano structure. By using the square structure as an example, the effectiveness of the electromagnetic shielding enhanced by the double-layer micro-nano structure is investigated, and a calculation formula for the electromagnetic shielding of the double-layer structure is derived. In addition, a full-wave simulation is carried out using CST Microwave Studio, the results of which are in good agreement with those of the theoretical calculations. In the full-wave simulation, the micro-nano structure is two-three orders of magnitude smaller than the calculated corresponding wavelength, which verifies the correctness of the mechanism analysis and the calculation of the full-wave simulation software. The analysis of the electromagnetic shielding enhancement mechanism and the provided calculation formula can be extended to the multilayer micro-nano structure, which is universal. To further verify the accuracy of the mechanism analysis and the full-wave software simulation results, a square double-layer micro-nano structure sample is prepared. The measured results of the sample are essentially consistent with the theoretical and full-wave simulation results. The shielding effectiveness is greater than 45 dB in the range of 2-18 GHz, and the average light transmittance exceeds 71%, which has good transparent shielding performance. This mechanism analysis provides theoretical guidance for designing micro-nano structures with increased light transmission and high-efficiency electromagnetic shielding performance.
Jun. 10, 2022Vol. 30 Issue 11 1310 (2022)
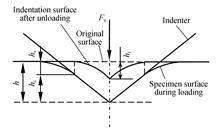
Mengran GE, Quanjing WANG, and Zhenzhong ZHANG
In abrasive machining for brittle materials such as monocrystalline silicon and optical glass, the key to obtaining a high-quality machined surface is that the single abrasive grit's actual scratching depth should be less than the critical cutting depth of ductile-to-brittle. However, when calculating the actual scratching depth of the single abrasive grit, the influence of indentation contact elastic deformation between monocrystalline silicon and abrasive grit must be considered. Owing to the structural similarity between the diamond abrasive cutting edge and the tip of the Berkovich indenter, the indentation contact deformation between monocrystalline silicon and the Berkovich indenter is theoretically analyzed and experimentally investigated in this study. Based on the nano-indentation experiment principle, the calculation equations of indenter displacement depth of Berkovich indenter loading press into monocrystalline silicon and indentation depth on monocrystalline silicon after unloading are established. A simplified calculation equation of contact elastic deformation between the Berkovich indenter and the monocrystalline silicon specimen is established by transforming the contact between them into the contact between sphere and plane. Nano-indentation experiments are carried out on the monocrystalline silicon. The measured nano-hardness of monocrystalline silicon is 12.22 GPa, and the effective elastic modulus is 173.09 GPa. The experiments were used to obtain the elastic contact stiffness, indenter displacement depth, and indentation depth of the nano-indentation contact between the monocrystalline silicon and the Berkovich indenter. The contact elastic deformation exceeds 50% of the indenter displacement depth. This study's findings are helpful for optimizing the process parameters for diamond wire saw precision slicing and the precision grinding of monocrystalline silicon.
Jun. 10, 2022Vol. 30 Issue 11 1317 (2022)
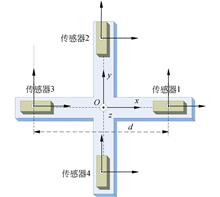
Qingzhu LI, Zhiyong SHI, Zhining LI, and Hongbo FAN
To study the theoretical detection limit of the magnetic gradient tensor system (MGTS), the differential tensor measurement range formula was derived with the magnetic dipole forward equation, the tensor matrix characteristic equation and the tensor invariant, and the MGTS theoretical detection limit estimation method was proposed. First, the target magnetic moment was estimated with the magnetic gradient tensor derivative invariant relations, and the difference calculation principle was used to estimate the measurement accuracy of the tensor component of the MGTS in the static sampling of the background field; then, the theoretical detection limit of on-site MGTS was estimated with the proposed method; and finally, the magnetic object was slided away from the MGTS and continuous sampling was performed, recording the actual tensor signal observable range, and verifying the estimation result of detection limit. The results show that the theoretical detection limit of MGTS is related to the baseline distance d, the measurement accuracy q, the target magnetic moment intensity M, the angle θ between the target magnetic moment and the observation point, etc.; The longer d, the higher q, and the larger M, the farther detect distance; The longer d and the closer observation, the greater the theoretical differential measurement error; The detection range of MGTS reaches the maximum in the direction parallel to the magnetic moment, but decreases sharply in the direction perpendicular. The experiments show that the estimation accuracy of detection limit of the planar-cross MGTS for four typical magnets is ± 0.5 m.
Jun. 10, 2022Vol. 30 Issue 11 1325 (2022)
Jie REN, Wei TAN, Feng GUO, Hui LIU, and Hong CHANG
The strontium atomic optical clock in space experiences changes in the geomagnetic field during its orbit of amplitudes of approximately 80 μT. By introducing changes in the external magnetic field of the same magnitude, the influence of the changing magnetic field on the loading of cold atoms from the magneto-optical trap to the optical lattice of the space optical clock is observed. The influence of the changing geomagnetic field on the detection of clock transitions is theoretically analyzed, and the need for magnetic field stability is investigated. The magnetic field of the space environment is simulated by rotating a permanent magnet. Furthermore, a three-dimensional fluxgate probe is used for real-time detection, and an active compensation system is designed to compensate the external magnetic field synchronously. Because the magnetic field in the central area of the magnetic optical trap of the space optical clock fluctuates by a sub-μT magnitude, it can meet the compensation and control requirements of the space optical clock with respect to the magnetic field.
Jun. 10, 2022Vol. 30 Issue 11 1337 (2022)

Songnian TAN, Fuchao WANG, Yongsen XU, Yefei WANG, and Quanchao LI
To meet the demanding requirements of the aeronautical optoelectronic platform for surface accuracy and dynamic performance of the visible/infrared dual-band two-axis fast steering mirror, a lightweight flat mirror assembly and a flexible structure have been specifically designed. First, the design method of the fast steering mirror structure is summarized, their design elements are clarified, and the influence of assembly error is analyzed. A lightweight mirror supporting the center of the back is designed, and the high-precision assembly of the motor is realized through a positioning fixture. Then, based on the cross-shaped flexible bearing, the design of the biaxial flexible structure is realized. Finally, the surface accuracy and mode of the fast steering mirror are simulated and tested. The test results show that the surface shape accuracy (RMS) of the flat mirror is greater than 0.017λ (λ=632.8 nm), the closed-loop bandwidth of the fast steering mirror is higher than 200 Hz, and the position errors in both the X- and Y-directions are less than 1.2 μrad. As a result of achieving high surface accuracy and dynamic performance, the miniaturization and modularization of a fast steering mirror are realized, allowing them to function stably and reliably in complex aviation environments.
Jun. 10, 2022Vol. 30 Issue 11 1344 (2022)
Xiaodong WANG, Zhongyang YU, Zheng XU, Shiqin LU, and Shipeng CUI
Feature localization based on microscopic vision is important for precision assembly. Because assembly states vary in a batch assembly, feature positioning errors often arise, which significantly interrupt the process and affect efficiency. Therefore, establishing a solid and robust feature localization algorithm is crucial. This paper proposes a support vector machine (SVM) model for synthesizing gradient histograms and local binary patterns. Furthermore, the pyramid search strategy is employed to improve the recognition efficiency and realize the micro-feature localization method. Performance verification and heuristic application are conducted on self-developed precision automatic assembly equipment, and different features are collected for SVM training. The influences of interference factors such as texture and illumination on the positioning stability are investigated in detail. Additional experiments regarding the positioning accuracy and actuator component assembly are performed. Under various conditions, the proposed approach presents good unimodal, repetitive accuracy and robustness. A recognition accuracy rate of 98% can be achieved. The positioning accuracy is better than 4 μm, and the actual assembly accuracy is better than 7 μm. The feature localization method can meet the localization requirements under different assembly conditions in real batch production and provides an effective solution for precision automatic assembly localization.
Jun. 10, 2022Vol. 30 Issue 11 1353 (2022)
Kun ZHANG, Zheng QU, Xing ZHONG, Jingchen LI, and Xi ZHANG
Developing a lightweight and compact mechanical compensation zoom optical system with a high zoom ratio is challenging. Therefore, this study investigates a design method for a lightweight and compact mechanical compensation zoom optical system with high magnification. First, to simplify the correction of chromatic and spherical aberration in the high magnification zoom optical system, the focal power distribution principle of the mechanical compensation zoom optical system is analyzed theoretically. Then, the “+, -, +, +” optical focal length distribution method with smooth root exchange and fixed aperture to change the F-number is proposed to realize a lightweight and compact design. In addition, the joint solution method using parameter setting and optical design software is adopted to solve the initial structure parameters quickly and effectively. Finally, a lightweight and compact continuous zoom optical system with a high zoom ratio is designed using spherical lenses based on the proposed design method. The maximum diameter of the zoom optical system is 67 mm, and the total length is 190 mm. In addition, the zoom system is also characterized by good imaging quality and no inflection point in the zoom curves.
Jun. 10, 2022Vol. 30 Issue 11 1263 (2022)
Changying DANG, Jiansu LI, Pengfei ZHAO, and Tai XU
The region localization methods of the positive first-order spectrum rely on the prior template or the tilt angle of the reference wave, which can be problematic. Therefore, a new method for locating the positive first-order spectrum that uses the maximum spectral phase value is proposed. The theoretical distribution of the spectral phase in pre-magnified digital holography is analyzed, which reveals that the maximum phase point is located in the center of the positive first-order term spectrum. Furthermore, the minimum distance between the centroids of the three regions (positive first-order spectrum, negative first-order spectrum, and zero-order term spectrum) and the maximum phase point is used to judge and locate the positive first-order spectrum region. Finally, using a micro-hole array and phase step as examples, experiments are carried out, the results of which are consistent with the theoretical analysis. Specifically, they demonstrate that the absolute error is 3.7 μm, and the standard deviation of depth is 4.2% when measuring the phase step. Therefore, the proposed method can accurately locate the positive first-order spectrum region. Moreover, it does not depend on the prior template or the tilt angle of the reference wave, which provides an automatic spectrum localization method for spatial filtering in off-axis digital holographic microscopy.
Jun. 10, 2022Vol. 30 Issue 11 1272 (2022)
Yu ZHANG, Yue ZHANG, Ning ZHANG, Yaowen LÜ, and Xiping XU
To achieve accurate pose estimation of a catadioptric panoramic camera in complex dynamic environments, this study proposed a binocular catadioptric panoramic camera simultaneous localization and mapping (SLAM) system for dynamic environments based on an inverse depth filter. The binocular catadioptric panoramic camera system was analyzed, and the depth information of space points was calculated through the process of triangulation on a sphere. An inverse depth filter based on Bayesian filtering was used to eliminate dynamic map points, whereby only static map points were then used to estimate the poses of the camera. Accurate pose estimation results were obtained in dynamic environments. More specifically, experiments were conducted in both low and high dynamic environments, where results showed that when the trajectory calculated by traditional SLAM system drifted, the dynamic SLAM system based on inverse depth filtering was always executed in a stable manner. The root mean square errors of the absolute trajectory error of our method in the two groups of highly dynamic environments are 0.52 m and 0.56 m, respectively. The accuracy is up to 96.35% higher than that of the traditional panoramic SLAM system.
Jun. 10, 2022Vol. 30 Issue 11 1282 (2022)
Shizheng SUN, Zhaowei LIU, Hui ZHANG, Jingtong YU, and Zeyin HE
To address the issue of serious coupling interference in fiber Bragg grating (FBG) flow and temperature composite sensing, this paper proposes a decoupling algorithm based on the Harris hawks optimizer algorithm optimized kernel extreme learning machine (HHO-KELM) by taking the small probe FBG flow and temperature composite sensor as the research object. First, a small probe FBG flow and temperature composite sensor with a hollow cylindrical cantilever beam as the force carrier is designed, and the mapping relationship between the wavelength drift, flow, and temperature is revealed. Then, an experimental system is constructed to carry out the flow and temperature composite sensor experiment, and the coupling characteristics of flow and temperature are analyzed. Finally, the HHO is used to optimize the KELM, and the KELM optimal regularization coefficient and kernel function parameter combination are obtained. Further, the flow and temperature decoupling model of HHO-KELM algorithm is established. After decoupling, in the flow rate range of from 2 m3/h to 30 m3/h, the average flow error is 0.038 m3/h, the mean square error is 1.91×10-3 m3/h, the mean square error of temperature is 0.027 ℃, and the mean square error is 1.03×10-3 ℃. Meanwhile, to verify the decoupling effect, the decoupling results of the HHO-KELM, BP, and ELM algorithms are compared. The experimental results show that the HHO-KELM algorithm has good decoupling accuracy and decoupling efficiency, and it can effectively reduce the coupling interference of flow and temperature. It can also improve the measurement accuracy and stability of the sensor and can realize the real-time dynamic decoupling of flow and temperature.
Jun. 10, 2022Vol. 30 Issue 11 1290 (2022)
Jian QIAO, Yang WU, Nengda CHENG, Weilin CHENG, and Jingwei YANG
In this study, a double laser triangulation system was established to improve the transmission efficiency of the amorphous strip. The double laser triangulation system can detect the spatial position of the high reflection strip during transmission. Therefore, some key technologies were studied, such as laser beam shrinking, image acquisition and processing, centroid positioning, and system calibration. First, the principle of measuring the strong reflection strip’s spatial position with a double laser was introduced, followed by the design of the detection system. A beam constrictor was added to the transmission optical path to improve the positioning accuracy of laser spot centroid extraction. Second, the detection system’s calibration experiment was completed by setting up the experimental detection device for the spatial position of strip transmission. Furthermore, the calibration curve of the spatial position of the strip transmission was obtained. The fitting method of the corresponding curve between the spot centroid and the actual position of the strip based on the least square polynomial was proposed. Finally, the transmission position of the amorphous strip was detected by the high-speed camera and the CMOS camera simultaneously. The measurement accuracy of the CMOS camera was verified by taking the measurement results of the high-speed camera as the reference value. The results show that the relative deviation between the detection result of the CMOS camera and the reference value is less than 0.05%, conforming to the system position detection accuracy of 50% μm. The proposed system can be used for high precision measurement of spatial position in the transmission process of the strip with a high reflector.
Jun. 10, 2022Vol. 30 Issue 11 1301 (2022)
© Copyright 2018-2021 | Chinese Laser Press.
All Rights Reserved 沪ICP备15018463号-20