





 View fulltext
View fulltext

2025
Volume: 20 Issue 1
32 Article(s)
Jiankun LOU... and Hongdong WANG|Show fewer author(s)
ObjectivesThe rapid integration of artificial intelligence (AI) into maritime technology has driven unprecedented advancements in unmanned surface vehicles (USVs), positioning them as a crucial force in future maritime operations
Feb. 28, 2025Vol. 20 Issue 1 3 (2025)
Xinjue HU... and Shijie LI|Show fewer author(s)
The purpose of this work is to optimize the communication architecture for existing remotely-controlled ships to meet the challenges of network connectivity in diverse environments (e.g., ports, deep-sea, and polar regions), aimin
Feb. 28, 2025Vol. 20 Issue 1 15 (2025)

Lijia CHEN... and Yanzhi LIU|Show fewer author(s)
Systematic testing, verification and reliability evaluation of autonomous navigation capability are important prerequisites for the industrial application of intelligent ships. To clarify the requirements of different test objects
Feb. 28, 2025Vol. 20 Issue 1 25 (2025)

Pengbo SUN... and Zhihao LI|Show fewer author(s)
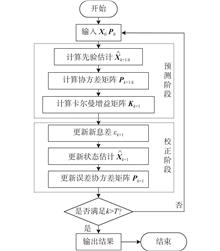
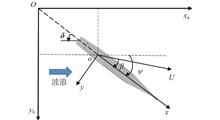
ObjectivesTo construct an accurate MMG (mathematical model group) model for a water-jet propulsion unmanned surface vehicle, the traditional extended Kalman filter algorithm and improved extended Kalman filter algorithm are combin
Feb. 28, 2025Vol. 20 Issue 1 38 (2025)
Yang HAN... and Min GU|Show fewer author(s)
ObjectivesAiming at the requirements of the real-time and accurate prediction of ship maneuvering motion, this paper investigates the prediction of ship maneuvering motion in regular waves using gray-box modelling to improve the a
Feb. 28, 2025Vol. 20 Issue 1 47 (2025)
Yaohui YU... and Yan PENG|Show fewer author(s)
ObjectiveAiming to address the problem of model inaccuracy caused by ship dynamic changes during actual navigation, this study proposes an adaptive online modeling method for ship maneuvering motion based on an error monitoring me
Feb. 28, 2025Vol. 20 Issue 1 58 (2025)

Lifei SONG... and Yongfeng ZHANG|Show fewer author(s)
ObjectivesTo address the issue of multicollinearity and parameter drift in the identification of hydrodynamic coefficients in ship separated-type models, this paper proposes a method for modeling simplified three-degree-of-freedom
Feb. 28, 2025Vol. 20 Issue 1 65 (2025)
Haozhe ZHANG... and Peng LEI|Show fewer author(s)
ObjectiveAiming at the low prediction precision and poor adaptability of ship models based on the data-driven modeling strategy, an enhanced bi-directional long short-term memory (Bi-LSTM) model is proposed for the high-precision
Feb. 28, 2025Vol. 20 Issue 1 76 (2025)
Zhigang QI... and Zhe LU|Show fewer author(s)
ObjectiveIt is difficult to achieve comprehensive parameter identification in multiple dimensions and degrees of freedom using traditional parameter identification methods. In order to obtain the real-time complex parameters and a
Feb. 28, 2025Vol. 20 Issue 1 85 (2025)
Haoyu CHEN... and Wei CHEN|Show fewer author(s)
ObjectiveDue to mixed-frequency multi-source disturbances, unmanned surface vehicles (USVs) encounter challenges in accurately capturing state information and ensuring path-tracking precision. To address this issue, a composite an
Feb. 28, 2025Vol. 20 Issue 1 191 (2025)
Junqiao SHI... and Feng XU|Show fewer author(s)
ObjectiveThe traditional model predictive control method employs a repeated online optimization approach, resulting in a high computational burden for underactuated ship path-following predictive controller. To address this issue,
Feb. 28, 2025Vol. 20 Issue 1 203 (2025)
Mingao LÜ... and Zhouhua PENG|Show fewer author(s)
ObjectivesA dynamic event-triggered collaborative path-following control method for multiple unmanned surface vehicles (USVs) is proposed, considering the constraints of network bandwidth resources, model uncertainties, and extern
Feb. 28, 2025Vol. 20 Issue 1 213 (2025)
Weikun WANG... and Jinpeng YU|Show fewer author(s)
ObjectivesA data-driven trajectory tracking control scheme is proposed for unmanned surface vehicles (USVs) with uncertain parameters. MethodsFirst, the USV kinematics subsystem is processed by the backstepping, and we can obtain
Feb. 28, 2025Vol. 20 Issue 1 223 (2025)
Yong XIONG... and Zhiyuan LYU|Show fewer author(s)
ObjectiveAiming at the problems of unknown ship model parameters and external disturbance and servo constraints, this paper proposes a method for the data-driven online identification of ship parameters and iterative analytical ca
Feb. 28, 2025Vol. 20 Issue 1 232 (2025)
Zhaokun YAN... and Hongdong WANG|Show fewer author(s)
ObjectiveThis paper presents a novel approach to the precise control of variable mass unmanned surface vehicles (USVs) during payload deployment tasks, addressing the control challenges caused by unpredictable variations in both m
Feb. 28, 2025Vol. 20 Issue 1 247 (2025)
Qiang GUO... and Daocheng MA|Show fewer author(s)
ObjectiveThis study investigates how to effectively address path-dependent constraints during the path-following of unmanned surface vessels in complex waterways while ensuring navigation safety and stability. MethodFirst, perform
Feb. 28, 2025Vol. 20 Issue 1 263 (2025)
Jianghua SUI... and Chunyu SONG|Show fewer author(s)
ObjectiveIn order to solve the track-keeping problem of a fishing vessel under rough sea conditions, a separated track-keeping controller is proposed.MethodsThe nonlinear feedback method is used to improve the closed-loop gain sha
Feb. 28, 2025Vol. 20 Issue 1 272 (2025)
Shijie LI... and Chengqi XU|Show fewer author(s)
ObjectivesIntelligent ships at sea are influenced by environmental interference, and the influence of the uncertainty of model parameters leads to the problem of low ship motion control accuracy, so it is necessary to improve the
Feb. 28, 2025Vol. 20 Issue 1 278 (2025)
Qi LANG... and Jinlong CHEN|Show fewer author(s)
Objective In the process of marine resource development, some thrusters of over-actuated ships are prone to failures during operation, resulting in a decrease in propulsion power. This paper aims to propose a fault-tolerant contro
Feb. 28, 2025Vol. 20 Issue 1 289 (2025)
Jun ZHANG... and Zhilin LIU|Show fewer author(s)
ObjectiveThe heave and pitch motions of a catamaran under severe sea states vary drastically, and the amplitudes of the motions are too large, which seriously affects seaworthiness. To address this problem, this paper proposes a f
Feb. 28, 2025Vol. 20 Issue 1 300 (2025)
Xiang YE... and Hang CHEN|Show fewer author(s)
ObjectiveAn adaptive neural control (ANC) scheme with specified performance is proposed for the tracking control of marine autonomous surface ships (MASS) subject to uncertain model parameters and unknown external environmental di
Feb. 28, 2025Vol. 20 Issue 1 309 (2025)
Shijie LI... and Jiawei HE|Show fewer author(s)
ObjectiveThis study aims to solve the problem of path-following control under environmental disturbances and model uncertainties, especially the effects of external wind and wave environments. MethodBased on a model predictive con
Feb. 28, 2025Vol. 20 Issue 1 317 (2025)
Jiwen ZHANG... and Zhaoyang WANG|Show fewer author(s)
ObjectivesThis paper seeks to provide a solution for the formation control issue that arises when autonomous underwater vehicles (AUVs) are subjected to interference from obstacles and complex ocean currents. Methods To tackle the
Feb. 28, 2025Vol. 20 Issue 1 326 (2025)
Yi WANG... and Xiangheng LI|Show fewer author(s)
ObjectiveTo address the covert communication requirements of autonomous underwater vehicles (AUVs), this study proposes a near-surface communication mode equipped with a foldable antenna.MethodsUtilizing strip theory to predict th
Feb. 28, 2025Vol. 20 Issue 1 340 (2025)
Desheng XU, and Chunhui XU
ObjectiveIn order to improve the robustness of autonomous underwater vehicle (AUV) controllers to environment modeling errors, this paper proposes a reinforcement learning control strategy that introduces contextual information an
Feb. 28, 2025Vol. 20 Issue 1 350 (2025)
Mingqi YAO... and Lei QIAO|Show fewer author(s)
ObjectivesTo improve the ability of autonomous underwater vehicle (AUV) formations to perform tasks in complex obstacle scenarios, a distributed three-dimensional affine formation shape maneuver control method is proposed for mult
Feb. 28, 2025Vol. 20 Issue 1 360 (2025)
Wei GUAN... and Tongbo HU|Show fewer author(s)
ObjectiveIn order to improve the economy and safety of ship navigation path in actual sea environment, this paper proposes a ship global path planning method with an improved Deep Q-Network (DQN) algorithm.MethodFirst, a prioritiz
Feb. 28, 2025Vol. 20 Issue 1 107 (2025)
Guobing XIE... and Binghua SHI|Show fewer author(s)
ObjectiveTo address the challenges of path planning for unmanned surface vehicles in complex waters, this paper proposes an improved ant colony optimization(ACO)algorithm based on uneven distributed pheromone and multi-objective o
Feb. 28, 2025Vol. 20 Issue 1 115 (2025)
Xiaoqian SHI... and Lifei SONG|Show fewer author(s)
ObjectiveMaintaining consistent tracking of surface ships using unmanned surface vehicles (USVs) is particularly challenging due to the target's high maneuverability and complex motion trajectories. Additionally, environmental int
Feb. 28, 2025Vol. 20 Issue 1 125 (2025)
Qunpeng WANG... and Jinshui ZHANG|Show fewer author(s)
Objectives To make local path planning algorithms more consistent with the maneuvering characteristics of ships, thereby generating safer and more reliable reference paths, this paper proposes a three-dimensional potential field m
Feb. 28, 2025Vol. 20 Issue 1 135 (2025)
Wei GUAN... and Miaomiao WANG|Show fewer author(s)
ObjectivesTo enhance the safety and efficiency of maritime traffic, this paper proposes an autonomous collision avoidance decision-making method for unmanned ships based on an enhanced Deep Deterministic Policy Gradient (DDPG) alg
Feb. 28, 2025Vol. 20 Issue 1 172 (2025)
Xianghong LI... and Lei QIAO|Show fewer author(s)
ObjectivesConsidering that existing research on autonomous underwater vehicle (AUV) obstacle avoidance mainly focuses on low-speed obstacle avoidance for small and medium-sized AUVs and overly simplifies the diverse constraints wi
Feb. 28, 2025Vol. 20 Issue 1 181 (2025)
© Copyright 2018-2021 | Chinese Laser Press.
All Rights Reserved 沪ICP备15018463号-20